
What is the motor starting current?
There are different theories about how many times the starting current of the motor is the rated current, and many of them are based on the specific situation.
For example, more than ten times, 6~8 times, 5~8 times, 5~7 times, etc.
One is that when the speed of the motor is zero at the moment of start-up (that is, the initial moment of the start-up process), the current value at this time should be its stalled current value.
For the most frequently used Y series three-phase asynchronous motors, there are clear provisions in the JB/T 10391 "Y series three-phase asynchronous motors" standard. Among them, the specified value of the ratio of the locked-rotor current to the rated current of the 5.5kW motor is as follows:

· When the synchronous speed is 3000, the ratio of the stalled current to the rated current is 7.0;
· When the synchronous speed is 1500, the ratio of the stalled current to the rated current is 7.0;
· When the synchronous speed is 1000, the ratio of the locked-rotor current to the rated current is 6.5;
· When the synchronous speed is 750, the ratio of the stalled current to the rated current is 6.0.
The power of the 5.5kW motor is relatively large, and the ratio of the starting current to the rated current of the motor with less power is smaller, so the electrician textbooks and many places say that the starting current of the asynchronous motor is 4~7 times of the rated working current.
Why is the starting current of the motor large, and the current is small after starting?
Here it is necessary to understand from the perspective of the principle of motor starting and the principle of motor rotation:
When the induction motor is in the stop state, from the electromagnetic point of view, just like the transformer, the stator winding connected to the power supply is equivalent to the primary coil of the transformer, and the rotor winding that forms a closed circuit is equivalent to the secondary coil of the transformer that is short-circuited;
there is no electric connection between the stator winding and the rotor winding, only the magnetic connection, and the magnetic flux becomes a closed circuit through the stator, air gap and rotor core.
When closing, the rotor has not yet rotated due to inertia, and the rotating magnetic field cuts the rotor winding at the maximum cutting speed - synchronous speed,

so that the rotor winding induces the highest potential that can be reached, therefore, a large current flows in the rotor conductor, and this current generates the magnetic energy that cancels the stator magnetic field, just like the secondary magnetic flux of the transformer to cancel the effect of the primary magnetic flux.
In order to maintain the original magnetic flux that is compatible with the power supply voltage at that time, the stator automatically increases the current.

Because the current of the rotor is very large at this time, the stator current also increases very much, even as high as 4~7 times of the rated current, which is the reason for the large starting current.
Why is the current small after starting: as the speed of the motor increases, the speed at which the stator magnetic field cuts the rotor conductor decreases, the induced potential in the rotor conductor decreases, and the current in the rotor conductor also decreases, so the part of the current in the stator current that is used to offset the influence of the magnetic flux generated by the rotor current also decreases, so the stator current goes from large to small until normal.
What are the ways to reduce the starting current of a motor?
The common starting methods to reduce the starting current of the motor are direct starting, string resistance starting, autotransformer starting, star-delta decompression starting and inverter starting methods to reduce the impact on the power grid.
Direct start
Direct start is to directly connect the stator winding of the motor to the power supply, start at the rated voltage, with the characteristics of large starting torque and short starting time, and it is also the simplest, most economical and most reliable starting method.
The current is large when starting at full voltage, and the starting torque is not large, the operation is convenient, and the starting is fast, but this starting mode has relatively large requirements for the power grid capacity and load, and is mainly suitable for motor starting below 1W.
String resistor starts
The motor string resistance start, that is, a method of step-down starting. In the start-up process, the resistor is connected in series in the stator winding circuit, and when the start-up current passes, the voltage drop is generated on the resistor, which reduces the voltage applied to the stator winding, so that the purpose of reducing the start-up current can be achieved.
Autotransformer starts
The use of autotransformer multi-tap decompression, can not only adapt to the needs of different load starting, but also can get a larger starting torque, is a kind of decompression starting method often used to start a larger capacity motor. Its biggest advantage is that the starting torque is larger, when its winding tap is at 80%, the starting torque can reach 64% of the direct start, and the starting torque can be adjusted by the tap.
Star delta decompression starts
For the squirrel cage asynchronous motor with the stator winding in normal operation being triangular connection, if the stator winding is connected into a star shape when starting, and then connected into a triangle after starting, the starting current can be reduced and its impact on the power grid can be reduced.
This type of actuation is called star-delta decompression start, or simply star-delta start. When using star-delta starting, the starting current is only 1/3 of the original direct starting according to the delta connection. When the star delta starts, the starting current is only 2-2.3 times.
That is to say, when the star delta is used for starting, the starting torque is also reduced to 1/3 of the original direct start according to the triangle connection. It is suitable for no-load or light-load start-up occasions.
And compared to any other pressure reducing starter, its structure is the simplest and the cheapest. In addition, the star-delta starting method has another advantage, that is, when the load is light, the motor can be operated under the star-shaped connection.
In this case, the rated torque can be matched to the load, which increases the efficiency of the motor and thus saves power consumption.
The inverter is activated
The inverter is the motor control device with the highest technical content, the most complete control function and the best control effect in the field of modern motor control, which adjusts the speed and torque of the motor by changing the frequency of the power grid.
Because it involves power electronics technology and microcomputer technology, the cost is high and the requirements for maintenance technicians are also high, so it is mainly used in the field that needs speed regulation and high requirements for speed control.
How to accurately measure motor starting current?
Here it is necessary to understand from the perspective of the principle of motor starting and the principle of motor rotation:
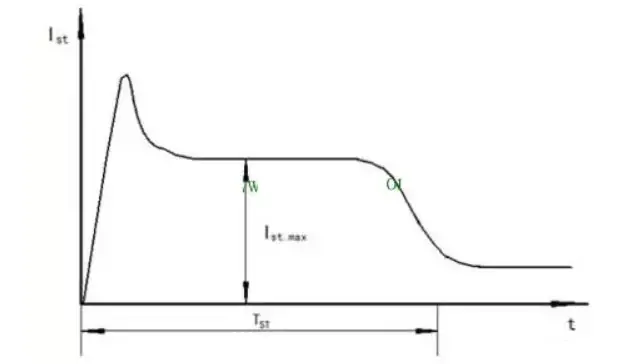
The process of motor start-up is a dynamic process, and if you want to test accurately in the actual test process, you generally use a waveform recorder with a high sampling rate or a test instrument with waveform recording function to complete.
The measured amount of electricity is recorded with a high sampling rate test instrument and the transient waveform or trend curve is plotted, which is generally measured by the following methods:
Use an oscilloscope to measure - install a current sensor with a relatively large conversion ratio (according to the power of the motor, or the parameters provided by the manufacturer) in the motor starting circuit, and the secondary winding of the current sensor is connected to the oscilloscope to complete the measurement.
Measure with fault recording device - install a current sensor in the motor starting circuit, connect the secondary winding of the current sensor to the fault recording device, and start the recording during the motor start-up process, which can be measured.
Measured with a portable power quality analyzer – a current sensor is installed in the motor starting circuit, and the secondary windings of the current sensor are connected to the portable power quality analyzer to measure during the motor start-up process.

Test with a high-end motor test system – The starting current can be effectively tested by setting parameters such as the dynamometer sensor ratio and the synchronization source.
Measure with a power analyzer – a power analyzer is a universal test instrument and an essential component of a modern motor test bench, which can accurately test various parameters of the motor with high precision.

Get more information from electric motor manufacturer directly , At Dongchun Motor, we pride ourselves on being a leading electric motor manufacturer based in China, with an extensive catalog that meets the diverse needs of various industries.
As we extend our invitation to potential buyers and industry partners, we want to highlight the depth and breadth of our product range, emphasizing our commitment to quality, efficiency, and innovation.







