Casi la mitad del consumo de energía mundial es consumido por motores eléctricos, por lo que se dice que la alta eficiencia de los motores eléctricos es la medida más eficaz para resolver los problemas energéticos del mundo.
En general, se refiere a la transformación de la fuerza generada por el flujo de corriente en un campo magnético en una acción rotatoria y, en un amplio rango, también incluye la acción lineal.
Y según el principio de rotación del motor, se puede dividir aproximadamente en las siguientes categorías. (Excepto motores especiales)
Motores eléctricos de CC / motores de CC (corriente continua)
motores cepillados
Los motores de escobillas ampliamente utilizados se denominan generalmente motores eléctricos de CC.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Motor CC sin escobillas
Los motores de CC sin escobillas no usan escobillas ni conmutadores, pero usan una función de conmutación como un transistor para cambiar la corriente y realizar una acción de rotación.
Motor paso a paso.
Este motor funciona de forma síncrona con potencia de pulso y, por lo tanto, también se denomina motor de inducción de pulso.
Se caracteriza por la capacidad de lograr fácilmente una operación de posicionamiento precisa.
motores de corriente alterna
Motor asincrónico
La alimentación de CA genera un campo magnético giratorio en el estator, que a su vez genera una corriente inducida en el rotor, en cuya interacción se produce la rotación del motor de inducción de CA.
Motor sincrónico
La alimentación de CA crea un campo magnético giratorio y el rotor con polos magnéticos gira debido a la atracción.
-La velocidad de rotación está afortunadamente sincronizada con la frecuencia de la fuente de alimentación.
Sobre corrientes, campos magnéticos y fuerzas
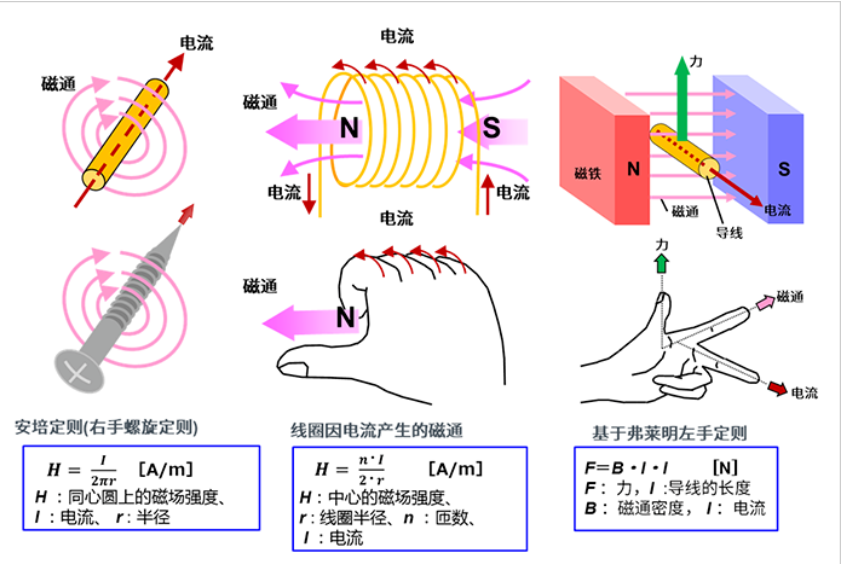
Primero, en aras de las explicaciones posteriores de los principios motores, revisemos las leyes básicas relacionadas con la corriente, el campo magnético y la fuerza.
Aunque hay un sentimiento de nostalgia, es fácil olvidar este conocimiento si no sueles utilizar componentes magnéticos.
Combinamos imágenes y fórmulas para ilustrar.
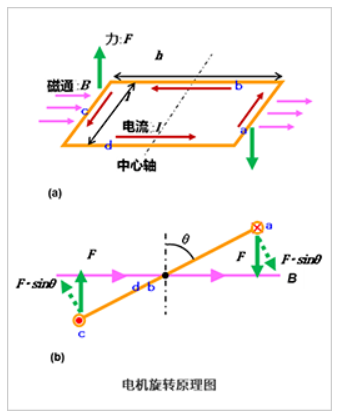
Cuando la estructura de alambre es rectangular, se tiene en cuenta la fuerza que actúa sobre la corriente.
La fuerza F que actúa sobre las partes de los lados a y c es
El par se genera con el eje central como eje central.
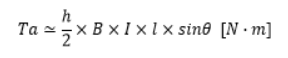
Por ejemplo, cuando se considera un estado donde el ángulo de rotación es solo θ, la fuerza que actúa en ángulo recto con b y d es senθ, por lo que el par Ta de la parte a está dado por:
Considerando la parte c de la misma manera, el par se duplica y genera el par calculado por la siguiente ecuación
Dado que el área del rectángulo es S = h・l, al sustituirlo en la ecuación anterior se obtiene el siguiente resultado.
La fórmula se aplica no solo a los rectángulos, sino también a otras formas comunes, como los círculos. El motor hace uso de este principio.
¿Cómo gira un motor eléctrico?
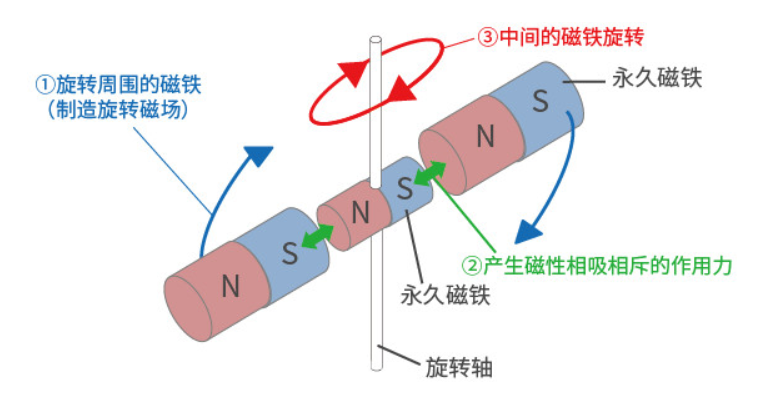
1) Los motores de inducción giran con la ayuda de imanes y fuerza magnética
Alrededor de un imán permanente con un eje giratorio,
① el imán gira (de modo que se genera un campo magnético giratorio),
② luego, según el principio de que los polos N y S se atraen en polos diferentes y se repelen en el mismo nivel,
③ el imán con un eje giratorio girará.
Este es el principio básico de la rotación de los motores de corriente alterna.
La corriente que fluye en el conductor provoca un campo magnético giratorio (fuerza magnética) a su alrededor y, por lo tanto, el imán gira, que es prácticamente el mismo estado de acción que este.
Además, cuando el cable se enrolla en forma de bobina, la fuerza magnética se sintetiza, creando un gran flujo de campo magnético (flujo) que produce polos N y S.
Además, al insertar un núcleo de hierro en el alambre en forma de bobina, las líneas de fuerza magnéticas se vuelven fáciles de atravesar y se puede generar una fuerza magnética más fuerte.
2) motor giratorio real
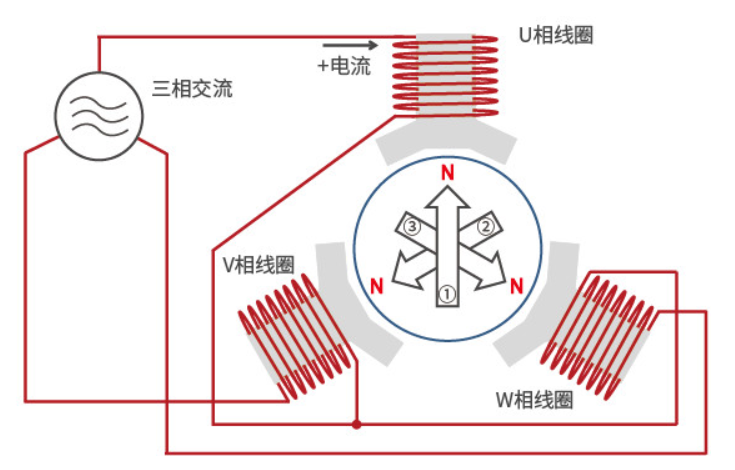
Aquí, como un método práctico de rotación del motor, presentamos el método de creación de un campo magnético giratorio utilizando bobinas y un motor de CA trifásico.
(Los motores industriales de CA trifásicos son una señal de CA espaciada 120° en fase)
El campo magnético sintético en el estado ① anterior corresponde a la figura ① a continuación.
El campo magnético sintético en el estado ② anterior corresponde a la figura ② a continuación.
El campo magnético sintético en el estado ③ anterior corresponde a la figura ③ a continuación.
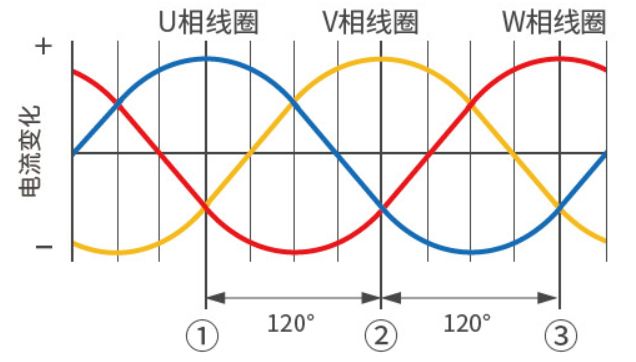
Como se mencionó anteriormente, las bobinas del núcleo bobinado se dividen en tres fases, con una configuración de intervalo de 120° de bobinas de fase U, bobinas de fase V y bobinas de fase W, con la bobina con polo N que produce alto voltaje y la Bobina con polo S que produce bajo voltaje.
Cada fase cambia según una onda sinusoidal, por lo que cambiará la polaridad (polo N, polo S) y su campo magnético (fuerza magnética) generado por cada bobina.
En este momento, la bobina que produce el polo N solo cambia en secuencia de acuerdo con la bobina de fase U → bobina de fase V → bobina de fase W → bobina de fase U y, por lo tanto, se produce la rotación.
Estructura de un pequeño motor.
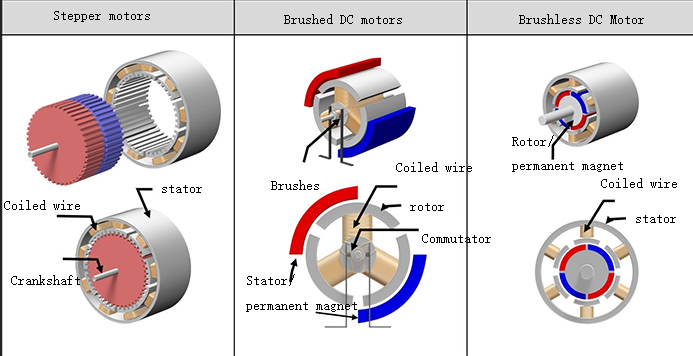
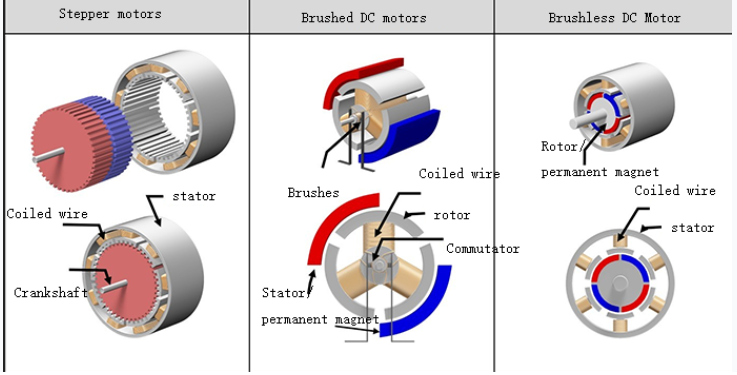
La siguiente figura muestra la estructura aproximada y la comparación de tres tipos de motores industriales: motores paso a paso, motores de CC (CC) con escobillas y motores de CC (CC) sin escobillas.
Los componentes básicos de estos motores son principalmente bobinas, imanes y rotores, y también hay tipos de bobina fija y de imán fijo según el tipo.
La siguiente es una descripción de la estructura asociada con el diagrama de ejemplo. Dado que puede haber otras estructuras si se dividen con más cuidado, comprenda que la estructura que se presenta en este documento se encuentra debajo de un marco grande.
La bobina del motor paso a paso aquí está fija en el lado exterior y el imán gira en el lado interior.
Aquí, el imán del motor de CC con escobillas se fija en el lado exterior y la bobina gira en el lado interior. T
Las escobillas y el conmutador son responsables de suministrar energía a la bobina y cambiar la dirección de la corriente.
En el caso de un motor sin escobillas, la bobina está fija en el exterior y el imán gira en el interior.
La estructura de un motor sin escobillas es diferente incluso si los componentes básicos son los mismos debido a los diferentes tipos de motores. Los detalles se explicarán en cada sección.
motor de cepillo
Estructura de motores DC con escobillas
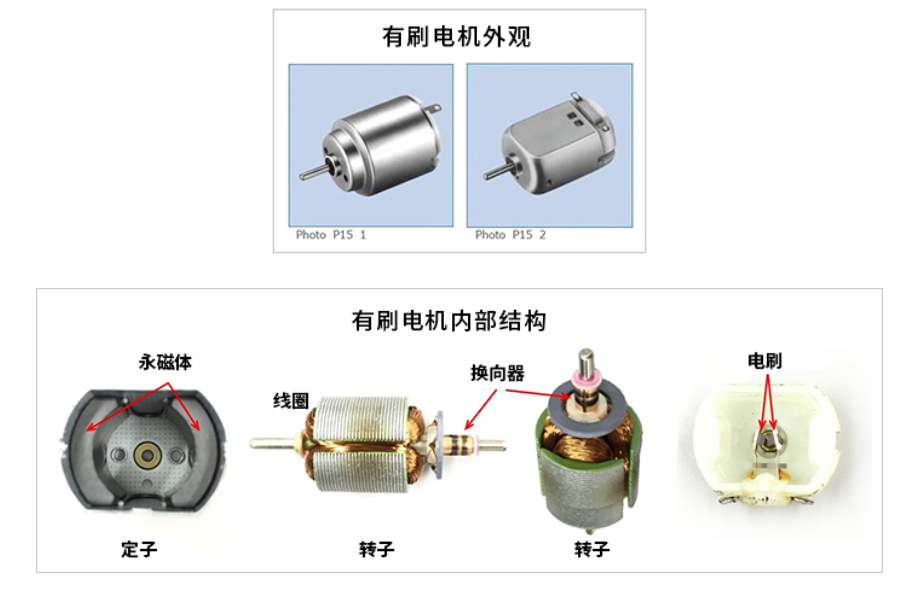
A continuación se muestra la apariencia de un motor de CC con escobillas que se usa a menudo en los modelos, y un diagrama esquemático de la descomposición de un motor normal de dos polos (2 imanes) y tres ranuras (3 bobinas). Quizás muchos de ustedes tengan experiencia en desarmar el motor eléctrico de CC y sacar los imanes.
Puede ver que los imanes permanentes de un motor de CC con escobillas son fijos y las bobinas de un motor de CC con escobillas pueden girar alrededor del centro interno.
The fixed side is called the "stator" and the rotating side is called the "rotor".
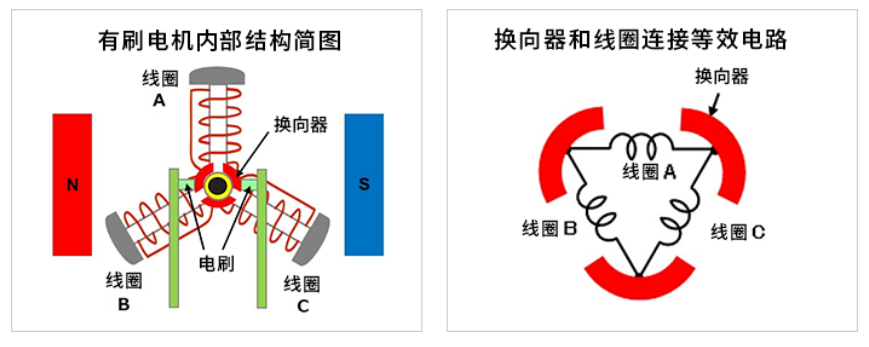
El siguiente es un esquema estructural que representa el concepto de estructura.
La periferia del eje central giratorio tiene tres conmutadores (láminas de metal dobladas para la conmutación de corriente).
Para evitar el contacto entre sí, los conmutadores están configurados con una separación de 120° (360° ÷ 3 piezas). Los conmutadores giran con la rotación del eje.
Un conmutador está conectado a un extremo de la bobina y al otro extremo de la bobina, y los tres conmutadores y las tres bobinas forman un todo (anillo) como una red de circuitos.
Se fijan dos escobillas a 0° y 180° para hacer contacto con el conmutador.
Se conecta una fuente de alimentación de CC externa a las escobillas y la corriente fluye en la ruta escobilla → conmutador → bobina → escobilla.
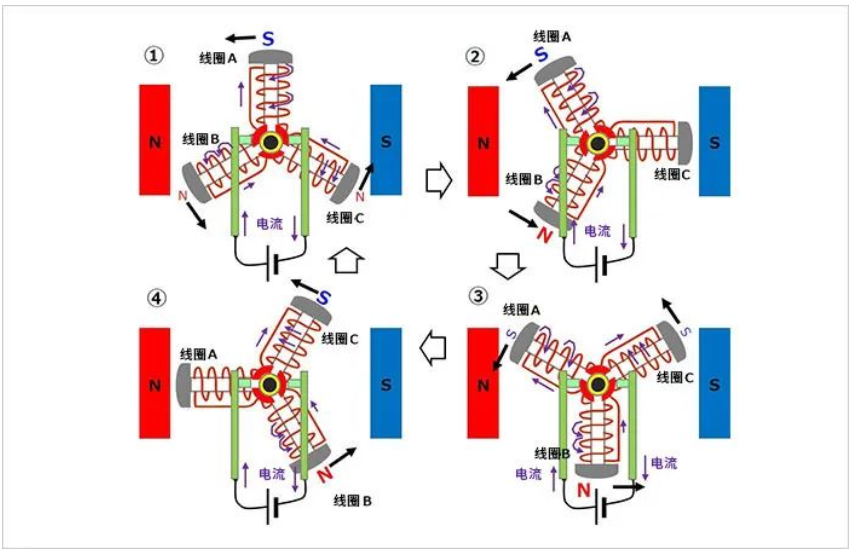
Principio de rotación del motor dc con escobillas
① Girar en sentido contrario a las agujas del reloj desde el estado inicial
La bobina A está en la parte superior y conecta el suministro de herramientas eléctricas a los cepillos, configure el lado izquierdo como (+) y el lado derecho como (-).
Una gran corriente fluye desde la escobilla izquierda a través del conmutador hasta la bobina A.
Esta es la estructura donde la parte superior (exterior) de la bobina A se convierte en el polo S.
Y dado que la mitad de la corriente de la bobina A fluye desde el cepillo izquierdo hacia las bobinas B y C en la dirección opuesta a la bobina A, los lados exteriores de las bobinas B y C se vuelven polos N débiles (indicados por letras ligeramente más pequeñas en el cifra).
Los campos magnéticos generados en estas bobinas y los efectos de atracción y repulsión de los imanes hacen que las bobinas estén sujetas a una fuerza de rotación en sentido contrario a las agujas del reloj.
② Más rotación en sentido contrario a las agujas del reloj
A continuación, suponga que la escobilla derecha está en contacto con ambos conmutadores en un estado en el que la bobina A gira 30° en sentido contrario a las agujas del reloj.
La corriente de la bobina A fluye continuamente desde la escobilla izquierda a través de la escobilla derecha y el lado exterior de la bobina sigue siendo el polo S.
La misma corriente que la bobina A fluye a través de la bobina B, y el lado exterior de la bobina B se vuelve más fuerte en el polo N.
Dado que los extremos de la bobina C están cortocircuitados por las escobillas, no fluye corriente ni se genera campo magnético.
Incluso en este caso, hay una fuerza de rotación en sentido contrario a las agujas del reloj.
La bobina en el lado superior de ③ a ④ está continuamente sujeta a una fuerza que se mueve hacia la izquierda, y la bobina inferior está continuamente sujeta a una fuerza que se mueve hacia la derecha y continúa girando en sentido contrario a las agujas del reloj.
Cuando la bobina gira cada 30° hacia ③ y ④, el lado exterior de la bobina se convierte en el polo S cuando la bobina está por encima del eje horizontal central; cuando la bobina está debajo, se convierte en el polo N y se repite el movimiento.
En otras palabras, la bobina superior se somete repetidamente a una fuerza que se mueve hacia la izquierda y la bobina inferior se somete repetidamente a una fuerza que se mueve hacia la derecha (ambas en sentido contrario a las agujas del reloj). Esto hace que el rotor gire en sentido contrario a las agujas del reloj en todo momento.
Si la alimentación se conecta al cepillo izquierdo opuesto (-) y al cepillo derecho (+), se genera un campo magnético en los devanados del estator de las bobinas en la dirección opuesta, por lo que la fuerza aplicada a las bobinas se mueve en la dirección opuesta y se convierte en rotación en el sentido de las agujas del reloj. .
Además, cuando se desconecta la alimentación, el rotor del motor cepillado deja de girar porque se ve privado del campo magnético que lo mantiene girando.
Motor trifásico sin escobillas de onda completa
Aspecto y estructura de un motor trifásico sin escobillas de onda completa
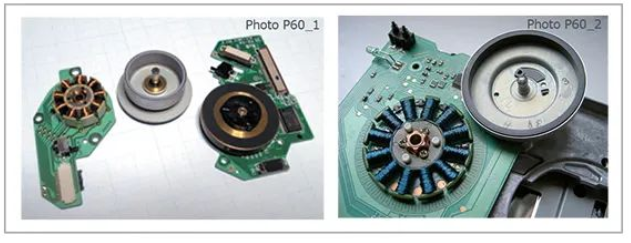
La siguiente figura muestra un ejemplo de la apariencia y estructura de un motor sin escobillas.
A la izquierda hay un ejemplo de un motor de husillo que se usa para girar un disco en un dispositivo de reproducción de discos. Hay 9 bobinas de tres fases x 3. A la derecha hay un ejemplo de un motor de husillo para un dispositivo FDD con 12 bobinas (trifásico x 4). Las bobinas se fijan en el tablero y se enrollan en el núcleo.
La parte en forma de disco en el lado derecho de las bobinas es el rotor de imán permanente. El eje del rotor se inserta en el centro de la bobina y cubre la parte de la bobina, y los imanes permanentes rodean la periferia de la bobina.
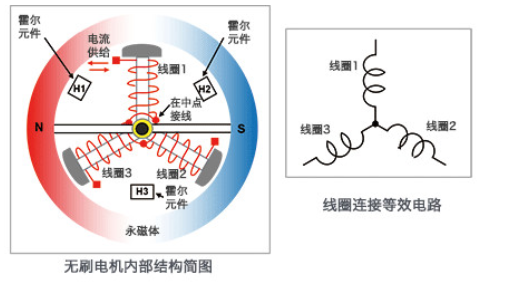
La estructura interna del motor trifásico sin escobillas de onda completa y el circuito equivalente de la conexión de la bobina.
A continuación se muestra un esquema de la estructura interna y el circuito equivalente de la conexión de la bobina.
Este esquema de estructura interna es un ejemplo de un motor de 2 polos (2 imanes) y 3 ranuras (3 bobinas) con una estructura muy simple. Es similar a la estructura de un motor con escobillas con el mismo número de polos y ranuras, pero el lado de la bobina es fijo y los imanes se pueden girar. Por supuesto, no hay cepillos.
En este caso, las bobinas están conectadas en forma de Y y se utiliza un elemento semiconductor para suministrar corriente a las bobinas, controlando la entrada y salida de corriente según la posición de los imanes giratorios.
En este ejemplo, se utiliza un elemento Hall para detectar la posición del imán. El elemento Hall está configurado entre la bobina y la bobina para detectar el voltaje generado y utilizado como información de posición en función de la intensidad del campo magnético. En la imagen del motor de husillo FDD anterior, también puede ver el elemento Hall utilizado para detectar la posición entre la bobina y la bobina (encima de la bobina).
Los elementos Hall son bien conocidos como sensores magnéticos.
Puede convertir la magnitud del campo magnético en la magnitud del voltaje e indicar la dirección del campo magnético en términos positivos o negativos.
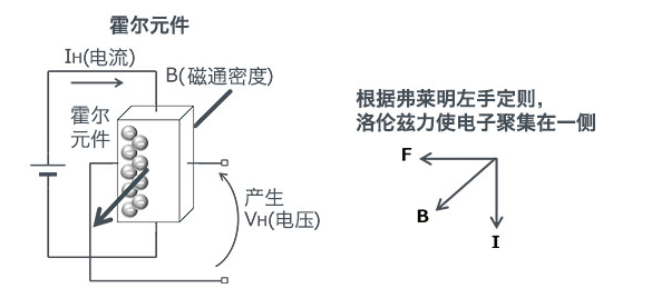
A continuación se muestra un diagrama que muestra el efecto Hall.
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
El voltaje resultante VH se expresa mediante la siguiente ecuación.
VH = (KH / d)・IH・B ※KH: coeficiente de Hall, d: espesor de la superficie de penetración del fundente
Como muestra la fórmula, cuanto mayor sea la corriente, mayor será el voltaje. Esta propiedad se usa a menudo para detectar la posición del rotor (imán).
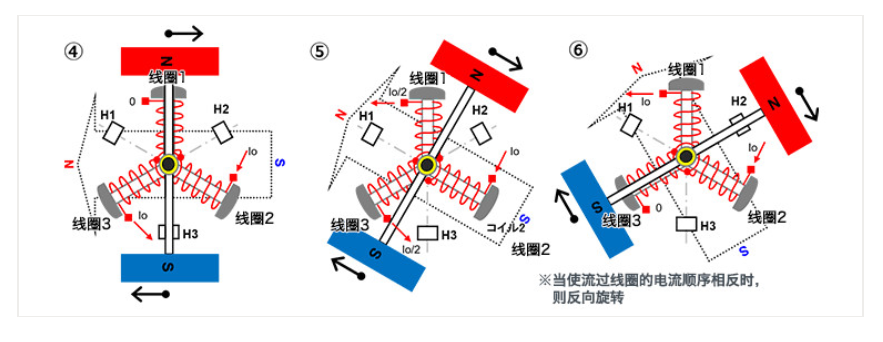
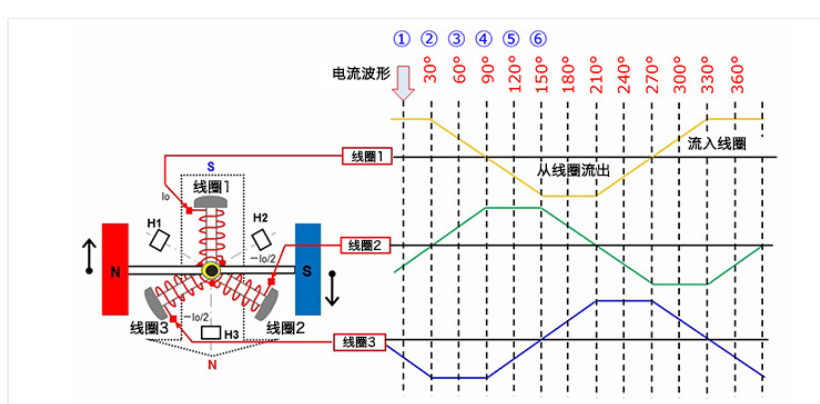
Principio de rotación del motor trifásico sin escobillas de onda completa
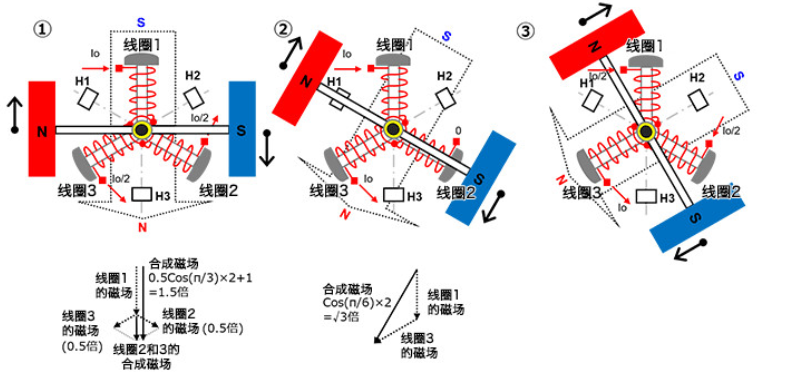
El principio de rotación del motor sin escobillas se explicará en los siguientes pasos ① a ⑥. Para facilitar la comprensión, aquí se simplifica el imán permanente de un círculo a un rectángulo.
①
En una bobina trifásica, fije la bobina 1 a las 12 en punto, la bobina 2 a las 4 en punto y la bobina 3 a las 8 en punto del reloj. Deje que el polo N del imán permanente de 2 polos esté en el lado izquierdo y el polo S en el lado derecho y sea giratorio.
Haga que la corriente Io fluya hacia la bobina 1 para producir el campo magnético del polo S en el exterior de la bobina. Deje que la corriente Io/2 fluya desde la bobina 2 y la bobina 3 para producir un campo magnético de polo N en el exterior de la bobina.
Cuando los campos magnéticos de las bobinas 2 y 3 se sintetizan vectorialmente, el campo magnético de polo N se genera hacia abajo, que es 0,5 veces el tamaño del campo magnético generado cuando la corriente Io pasa a través de una bobina, y se vuelve 1,5 veces el tamaño cuando agregado al campo magnético de la bobina 1. Esto produce un campo magnético sintético en un ángulo de 90° con respecto al imán permanente, de modo que se puede generar el par máximo y el imán permanente gira en el sentido de las agujas del reloj.
Cuando la corriente en la bobina 2 se reduce y la corriente en la bobina 3 aumenta según la posición de rotación, el campo magnético sintético también gira en el sentido de las agujas del reloj y el imán permanente sigue girando.
②
En el estado de rotación de 30°, la corriente Io fluye hacia la bobina 1 de modo que la corriente en la bobina 2 es cero, lo que hace que la corriente Io fluya hacia afuera de la bobina 3.
El lado exterior de la bobina 1 se convierte en el polo S y el lado exterior de la bobina 3 se convierte en el polo N. Cuando se sintetiza el vector, el campo magnético producido es √3 (≈1,72) veces el campo magnético producido cuando la corriente Io pasa por una bobina. Éste también genera un campo magnético sintetizado en un ángulo de 90° con respecto al campo magnético del imán permanente y gira en el sentido de las agujas del reloj.
Cuando la corriente de entrada Io de la bobina 1 se reduce según la posición de rotación, la corriente de entrada de la bobina 2 aumenta desde cero y la corriente de salida de la bobina 3 aumenta a Io, el campo magnético sintético también gira en el sentido de las agujas del reloj y el permanente El imán continúa girando.
Suponiendo que la corriente en cada fase es sinusoidal, el valor actual aquí es Io × sin(π⁄3) = Io × √3⁄2. Por síntesis vectorial del campo magnético, el tamaño total del campo magnético es (√3⁄2)2 × 2 = 1,5 veces el campo magnético generado por una bobina. Cuando las corrientes en cada fase son sinusoidales, la magnitud del campo magnético de síntesis vectorial es 1,5 veces el campo magnético producido por una bobina, independientemente de la posición del imán permanente, y el campo magnético forma un ángulo de 90° con respecto a el campo magnético del imán permanente.
③
En el estado en el que la rotación ha continuado durante 30°, la corriente Io/2 fluye hacia la bobina 1, la corriente Io/2 fluye hacia la bobina 2 y la corriente Io sale de la bobina 3.
El lado exterior de la bobina 1 se convierte en el polo S, el lado exterior de la bobina 2 también se convierte en el polo S y el lado exterior de la bobina 3 se convierte en el polo N. Cuando se sintetiza el vector, el campo magnético producido es 1,5 veces el campo magnético producido cuando la corriente Io fluye a través de una bobina (igual que ①). También en este caso se genera un campo magnético sintético con un ángulo de 90° con respecto al campo magnético del imán permanente y que gira en el sentido de las agujas del reloj.
④~⑥
Gire de la misma manera que ① a ③.
De esta forma, si la corriente que fluye hacia la bobina se cambia continuamente de forma secuencial según la posición del imán permanente, el imán permanente girará en una dirección fija. De manera similar, si la corriente se invierte y la dirección del campo magnético sintético se invierte, girará en sentido contrario a las agujas del reloj.
El siguiente diagrama muestra las corrientes en cada bobina para cada uno de los pasos ① a ⑥ anteriores en sucesión. La relación entre el cambio de corriente y la rotación debe entenderse por la descripción anterior.
Motores paso a paso
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
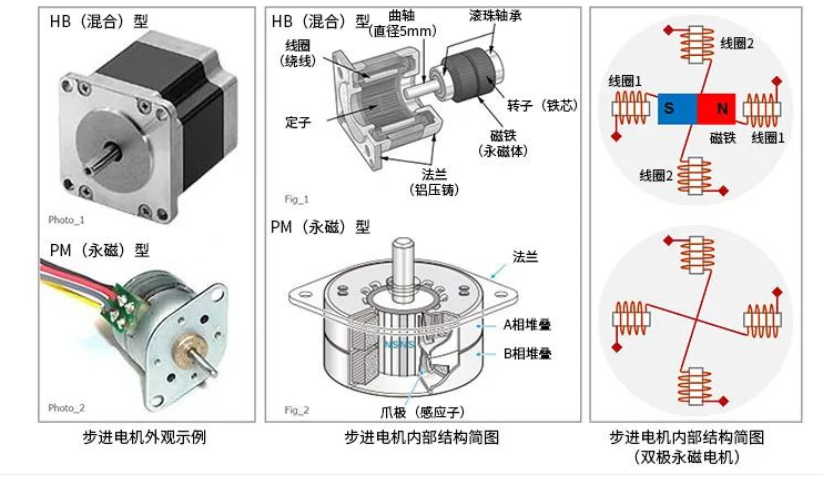
Estructura del motor paso a paso (bifásico bipolar)
Los siguientes diagramas, de izquierda a derecha, muestran un ejemplo de la apariencia de un motor paso a paso, un boceto de la estructura interna y un boceto del concepto de estructura.
En el ejemplo de apariencia, se muestra la apariencia de los motores paso a paso tipo HB (híbrido) y PM (imán permanente). El diagrama de estructura en el medio también se proporciona para el tipo HB y el tipo PM.
El motor paso a paso es una estructura en la que se fija la bobina y el imán permanente gira. El diagrama conceptual de la estructura interna de un motor paso a paso a la derecha es un ejemplo de un motor PM que utiliza dos fases (dos juegos) de bobinas. En el ejemplo de estructura básica del motor paso a paso, las bobinas están configuradas en el exterior y los imanes permanentes están configurados en el interior. Además de las bobinas bifásicas, también existen tipos con mayor número de fases como las trifásicas y las pentafásicas.
Algunos motores paso a paso tienen otras estructuras diferentes, pero la estructura básica del motor paso a paso se proporciona en este documento para facilitar la introducción de su principio de funcionamiento. A través de este artículo, esperamos comprender la estructura básica de los motores paso a paso con bobinas fijas e imanes permanentes giratorios.
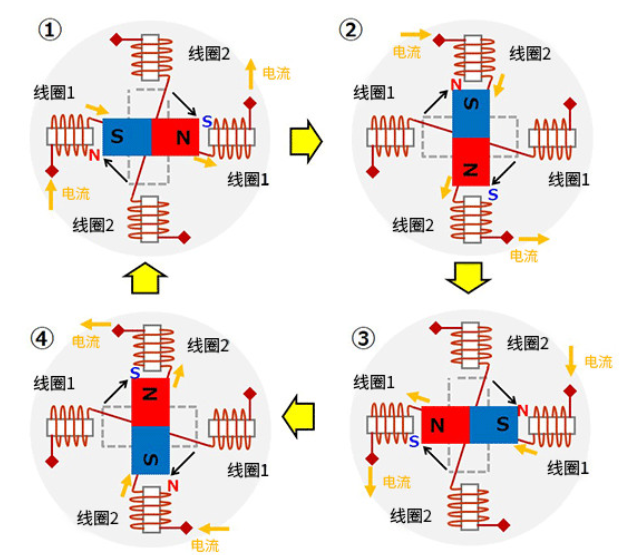
Principio de funcionamiento básico del motor paso a paso (excitación monofásica)
El siguiente diagrama se utiliza para presentar el principio básico de funcionamiento de un motor paso a paso. Este es un ejemplo de excitación para cada fase (conjunto de bobinas) de las bobinas de tipo bipolar de dos fases anteriores. La premisa del diagrama es que el estado cambia de ① a ④. Las bobinas consisten en la bobina 1 y la bobina 2, respectivamente. Además, las flechas de corriente indican la dirección del flujo de corriente.
①
・Haga que la corriente fluya desde el lado izquierdo de la bobina 1 y salga por el lado derecho de la bobina 1.
・No permita que la corriente fluya a través de la bobina 2.
・En este momento, el lado interior de la bobina izquierda 1 se convierte en N y el lado interior de la bobina derecha 1 se convierte en S.
・Como resultado, el imán permanente del medio es atraído por el campo magnético de la bobina 1 y cambia al lado izquierdo S y al lado derecho N y se detiene.
②
・La corriente de la bobina 1 se detiene para que la corriente entre desde el lado superior de la bobina 2 y salga desde el lado inferior de la bobina 2.
・El lado interior de la bobina superior 2 cambia a N y el lado interior de la bobina inferior 2 cambia a S.
・El imán permanente es atraído por su campo magnético y gira 90° en el sentido de las agujas del reloj para detenerse.
③
・La corriente de la bobina 2 se detiene para que la corriente entre por el lado derecho de la bobina 1 y salga por el lado izquierdo de la bobina 1.
・El lado interior de la bobina izquierda 1 se convierte en S y el lado interior de la bobina derecha 1 se convierte en N.
・El imán permanente es atraído por su campo magnético y gira otros 90° en el sentido de las agujas del reloj para detenerse.
④
・Detenga la corriente en la bobina 1 para que la corriente entre por el lado inferior de la bobina 2 y salga por el lado superior de la bobina 2.
・El lado interior de la bobina superior 2 se convierte en S y el lado interior de la bobina inferior 2 se convierte en N.
・El imán permanente es atraído por su campo magnético y gira otros 90° en el sentido de las agujas del reloj para detenerse.
El motor paso a paso se puede girar cambiando la corriente que fluye a través de la bobina mediante el circuito electrónico en el orden ① a ④ arriba. En este ejemplo, cada acción de conmutación hace que el motor paso a paso gire 90°.
Además, cuando la corriente fluye continuamente a través de una bobina, se puede mantener el estado de parada y el motor paso a paso puede tener un par de retención. Por cierto, si se invierte el orden de la corriente que fluye a través de la bobina, se puede hacer que el motor paso a paso gire en sentido inverso.
Encuentre un fabricante profesional de motores industriales: Dongchun motor China
 saltar al contenido
saltar al contenido