
Elektromotor je zařízení, které přeměňuje elektrickou energii na mechanickou energii prostřednictvím elektromagnetického působení.
Podle formy elektrické energie lze motory rozdělit do dvou kategorií: střídavé motory a stejnosměrné motory.
Mezi nimi lze střídavé motory rozdělit na jednofázové střídavé motory a třífázové střídavé motory. Podle rozdílu v rychlosti otáčení, podle principu klasifikace, lze motor také rozdělit na synchronní motory a asynchronní motory.
Synchronní motory lze rozdělit na synchronní motory s permanentními magnety, hysterezní synchronní motory a reluktanční synchronní motory podle různých magnetických polí.
Asynchronní motory naproti tomu nejsou k dispozici pouze v indukční formě, ale také ve formě střídavého komutátoru.
Indukční formu lze rozdělit na třífázové asynchronní motory a asynchronní motory se stíněným pólem. Kromě toho lze motor podle typu ochrany rozdělit také na motory uzavřené, otevřené, vodotěsné, ponorné, vodotěsné a nevýbušné.
Elektromotor je důležitou součástí převodového a řídicího systému, což je elektromagnetické zařízení pro realizaci přeměny nebo přenosu elektrické energie podle zákona elektromagnetické indukce, hlavní úlohou je generovat hnací moment, jako zdroj elektrické energie. spotřebičů nebo různých strojů a přeměňují elektrickou energii na mechanickou energii.
S rozvojem moderní vědy a techniky se těžiště motorů v praktických aplikacích začalo přesouvat od jednoduchého převodu v minulosti ke komplexnímu řízení, zejména pro přesné řízení otáček, polohy a točivého momentu motoru.
Motory však budou mít různé vzory a metody pohonu podle různých aplikací. Podle použití rotujících motorů je provedena následující základní klasifikace a my zavádíme hlavně nejreprezentativnější, běžné a základní motory v motorech - kontrolní motory, motory a motory signálu.
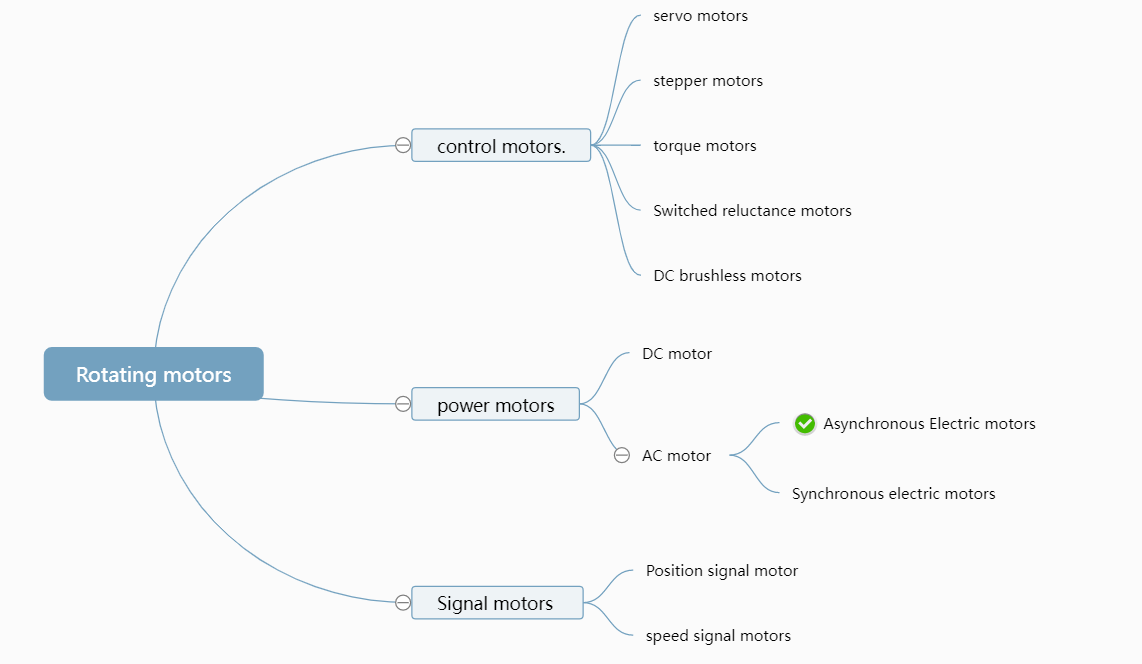
Řídící motory
Control motors are mainly used for precise speed and position control, and as "actuators" in control systems. They can be divided into servo motors, stepper motors, torque motors, switched reluctance motors, brushless DC motors and other categories.
Servomotory
Nejstarší servomotor je obecný stejnosměrný motor a pouze v případě, že přesnost řízení není vysoká, je obecný stejnosměrný motor použit jako servomotor. Současný stejnosměrný servomotor je z hlediska struktury stejnosměrný motor s malým výkonem a jeho buzení většinou využívá ovládání kotvy a ovládání magnetického pole, ale obvykle přijímá ovládání kotvy.
Servomotory jsou široce používány v různých řídicích systémech, zejména v různých systémech řízení pohybu, zejména v systémech follow-me. Může převádět signál vstupního napětí na mechanický výstup na hřídeli motoru a táhnout ovládaný prvek, aby se dosáhlo účelu ovládání. Obecně platí, že servomotor vyžaduje, aby rychlost motoru byla řízena přidaným napěťovým signálem, rychlost se může plynule měnit se změnou přidaného napěťového signálu, točivý moment lze řídit proudovým výstupem z regulátoru a motorem měl by se rychle odrážet, mít malou velikost a mít malou kontrolní sílu.

Krokový motor
Takzvaný krokový motor je akční člen, který převádí elektrické impulsy na úhlové posunutí. To znamená, že když krokový ovladač přijme pulzní signál, pohání krokový motor, aby se otáčel o pevný úhel v nastaveném směru.
Můžeme řídit úhlové posunutí motoru řízením počtu impulsů, abychom dosáhli účelu přesného polohování.
Současně můžeme také ovládat rychlost a zrychlení otáčení motoru řízením pulzní frekvence, abychom dosáhli účelu regulace rychlosti. V současnosti mezi běžně používané krokové motory patří reaktivní krokové motory (VR), krokové motory s permanentními magnety (PM), hybridní krokové motory (HB) a jednofázové krokové motory.
Rozdíl mezi krokovými motory a běžnými motory spočívá především v jejich pulzně poháněné formě, takže krokové motory lze kombinovat s moderní digitální řídicí technologií a mají vlastnosti jednoduché konstrukce, vysoké spolehlivosti a nízké ceny.
Ale krokové motory v přesnosti řízení, rozsahu změny rychlosti a výkonu při nízkých otáčkách jsou horší než tradiční řízení s uzavřenou smyčkou stejnosměrných servomotorů, takže krokové motory jsou široce používány ve výrobních postupech a další požadavky na přesnost nejsou v různých oblastech zvlášť vysoké. , zejména v oblasti výroby CNC obráběcích strojů.
A krokové motory nepotřebují A/D konverzi, mohou přímo převádět digitální pulzní signál na úhlové posunutí, takže byly považovány za nejideálnější aktuátory CNC obráběcích strojů.
Kromě aplikace v CNC obráběcích strojích lze krokové motory použít i v jiných strojích, jako jsou motory v automatických podavačích, motory v univerzálních disketových mechanikách a také v tiskárnách a plotrech.

Kromě toho má krokový motor také mnoho defektů. Vzhledem k frekvenci bez zatížení krokového motoru, takže krokový motor může běžet normálně při nízké rychlosti, ale pokud vyšší než určitá rychlost nemůže začít, a doprovázet ostrý pískající zvuk. Různí výrobci přesnosti subdivizi se mohou velmi lišit, čím větší je přesnost subdivize obtížnější kontrolovat. A rotace nízké rychlosti krokového motoru má velké vibrace a hluk.
Momentový motor
Takzvaný momentový motor je plochý typ vícepólového stejnosměrného motoru s permanentním magnetem.
Jeho kotva má větší počet štěrbin, komutačních desek a sériových vodičů pro snížení pulsace točivého momentu a pulsace rychlosti. Existují dva typy momentových motorů, DC momentové motory a AC momentové motory.

Mezi nimi má stejnosměrný momentový motor malou samovolně indukovanou reaktanci, takže odezva je dobrá. Jeho výstupní moment je úměrný vstupnímu proudu, nezávisle na rychlosti a poloze rotoru. Může běžet nízkou rychlostí přímo připojený k zátěži bez redukce převodu v téměř zablokovaném stavu, takže může produkovat vysoký poměr točivého momentu k setrvačnosti na hřídeli zátěže a eliminovat systematickou chybu způsobenou použitím redukčních převodů.
Střídavé momentové motory lze rozdělit na synchronní a asynchronní a běžně používaným proudem je asynchronní momentový motor s kotvou nakrátko, který má vlastnosti nízké rychlosti a velkého točivého momentu. Obecně se v textilním průmyslu často používají střídavé momentové motory. Jejich pracovní princip a konstrukce jsou stejné jako u jednofázových asynchronních motorů, ale jejich mechanické vlastnosti jsou měkčí díky vyššímu odporu rotoru nakrátko.
Spínací reluktanční motor
Spínaný reluktanční motor je nový typ motoru s regulací rychlosti, extrémně jednoduchá a robustní konstrukce, nízká cena, vynikající výkon regulace rychlosti, je silným konkurentem tradičního regulačního motoru, má silný tržní potenciál.
Existují však také problémy, jako je pulzace točivého momentu, provozní hluk a vibrace, které potřebují určitý čas na optimalizaci a zlepšení, aby se přizpůsobily aktuální aplikaci na trhu.
Bezkomutátorový DC motor
Brushless DC motor (BLDCM) is developed on the basis of brushed DC motor, but its drive current is uncompromisingly AC. Brushless DC motors can be further divided into brushless rate motors and brushless torque motors. Generally, brushless motors have two types of drive currents, one is a trapezoidal wave (usually a "square wave") and the other is a sine wave. Sometimes the former is called a brushless DC motor and the latter is called an AC servo motor, which is also a kind of AC servo motor to be exact.
Brushless DC motors usually have a "slender" structure in order to reduce rotational inertia. Brushless DC motors are much smaller in weight and volume than brushed DC motors, and the corresponding rotational inertia can be reduced by about 40%-50%. Due to the processing problems of permanent magnet materials, the capacity of brushless DC motors is generally below 100kW.
Mechanické vlastnosti a regulační charakteristiky tohoto motoru mají dobrou linearitu, široký rozsah otáček, dlouhou životnost, snadnou údržbu a nízkou hlučnost a nevyskytuje se zde řada problémů způsobených kartáči, takže tento motor má velký potenciál pro uplatnění v řídicích systémech.
Brushless DC motors are usually of "slender" construction to reduce the inertia.
Bezkomutátorové stejnosměrné motory mají mnohem menší hmotnost a objem než kartáčované stejnosměrné motory a odpovídající rotační setrvačnost lze snížit o přibližně 40 % až 50 %. Kvůli problémům se zpracováním materiálů s permanentními magnety je kapacita bezkomutátorových stejnosměrných motorů obecně nižší než 100 kW.
Mechanické vlastnosti a regulační charakteristiky tohoto motoru mají dobrou linearitu, široký rozsah otáček, dlouhou životnost, snadnou údržbu a nízkou hlučnost a nevyskytuje se zde řada problémů způsobených kartáči, takže tento motor má velký potenciál pro uplatnění v řídicích systémech.
silový motor
Výkonový motor se dělí na stejnosměrný motor a střídavý motor a střídavý motor se dělí hlavně na synchronní motor a asynchronní motor.
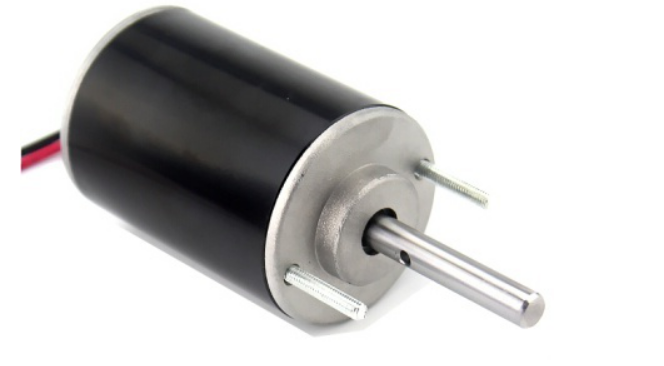
DC motor
Stejnosměrný motor je nejstarší motor, asi na konci 19. století, který lze zhruba rozdělit do dvou kategorií s komutátorem a bez komutátoru.
Stejnosměrný motor má lepší regulační vlastnosti, i když ve struktuře, ceně a údržbě nejsou tak dobré jako AC motor.
Ale protože problém s řízením rychlosti střídavého motoru nebyl dobře vyřešen a stejnosměrný motor má výhody dobrého výkonu řízení rychlosti, snadného startu, schopného načíst startování,
takže použití stejnosměrného motoru je stále velmi široké, zejména po vzniku křemíkem řízeného stejnosměrného napájení.
Stav aplikace: V životě existuje nespočet aplikací elektrických produktů, jako jsou ventilátory, holicí strojky, automatické dveře v hotelech, automatické dveřní zámky, automatické závěsy atd., všechny používají stejnosměrné motory.
Stejnosměrné motory jsou také široce používány v lokomotivní trakci, jako jsou stejnosměrné trakční motory pro železniční lokomotivy, stejnosměrné trakční motory pro lokomotivy metra, stejnosměrné pomocné motory pro lokomotivy, stejnosměrné trakční motory pro důlní lokomotivy, stejnosměrné motory pro lodě atd.
Jsou také široce používány v letadlech, tancích, radarech a dalších zbraních a vybavení. Na obrázku je stejnosměrný motor řady Z4.

AC motor
Synchronní motor
Takzvaný synchronní motor je elektromotor poháněný střídavým proudem, rotující magnetické pole rotoru a statoru běží synchronně.
The stator of synchronous motor is exactly the same as that of asynchronous motor, but there are two types of rotor: "convex pole" and "hidden pole".
Synchronní motor s konvexním rotorem je jednoduchý a snadno vyrobitelný, ale mechanická pevnost je nízká a je vhodný pro provoz při nízkých otáčkách.
Synchronní motor se skrytým pólem má komplikovaný výrobní proces, ale má vysokou mechanickou pevnost a je vhodný pro vysokorychlostní provoz.
The working characteristic of synchronous motor is the same as all motors, which is "reversible", that is, it can run in generator mode and motor mode.
Aplikační status: Synchronní motory se používají především ve velkých strojích, jako jsou dmychadla, čerpadla, kulové mlýny, kompresory, ocelové válcovny, malé a miniaturní přístroje a zařízení, nebo jako řídicí prvky, jejichž hlavním tělem jsou třífázové synchronní motory .
Kromě toho může být také použit jako regulátor pro dodávání indukčního nebo kapacitního jalového výkonu do sítě.

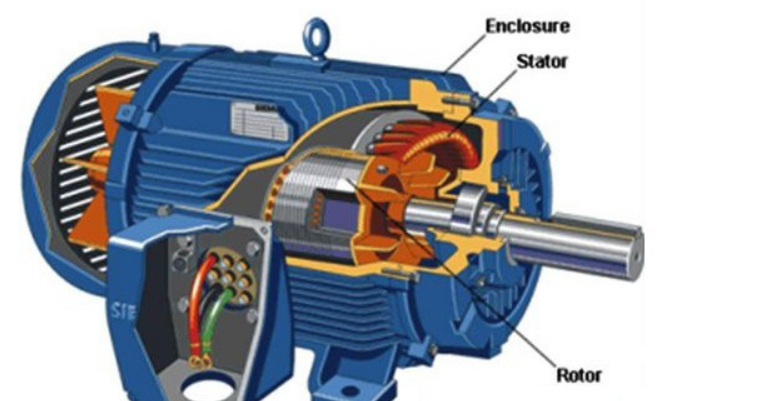
Asynchronní motor
Asynchronní motor je druh střídavého motoru založený na interakci rotačního magnetického pole vzduchové mezery a indukčního proudu vinutí rotoru, aby se vytvořil elektromagnetický točivý moment a realizovala se přeměna energie.
Asynchronní motor je obecně řada produktů s širokou škálou specifikací a je nejpoužívanějším a nejžádanějším ze všech motorů.
V současné době asi 90 % strojů v přenosu výkonu využívá střídavý asynchronní motor, takže jeho spotřeba elektrické energie tvoří více než polovinu celkové elektrické zátěže.
Podívejte se na video výrobce asynchronního motoru
Asynchronní motor má výhody jednoduché konstrukce, snadné výroby, použití a údržby, spolehlivého provozu a také menší hmotnosti a nižších nákladů.
Kromě toho má asynchronní motor vysokou provozní účinnost a dobré pracovní vlastnosti, od volnoběhu po plné zatížení v blízkosti provozu s konstantní rychlostí, může splnit požadavky na převody většiny průmyslových a zemědělských výrobních strojů.
Asynchronní motory jsou široce používány v pohonu obráběcích strojů, čerpadel, dmychadel, kompresorů, zdvihacích a navíjecích zařízení, důlních strojů, strojů lehkého průmyslu, zemědělských a vedlejších zpracovatelských strojů a většiny průmyslových a zemědělských výrobních strojů, stejně jako domácích spotřebičů a lékařského vybavení.
Stav aplikace: Nejběžnější asynchronní motory jsou jednofázové asynchronní motory a třífázové asynchronní motory, z nichž třífázový asynchronní motor je hlavním tělem asynchronního motoru, třífázový asynchronní motor lze použít k pohonu různých strojů pro všeobecné použití, jako jsou kompresory, čerpadla, drtiče, řezací obráběcí stroje, dopravní stroje a další mechanická zařízení, v hornictví, strojírenství, hutnictví, naftovém průmyslu, chemickém průmyslu, elektrárnách a dalších průmyslových a těžebních podnicích jako hlavní hybatel Motor se používá v hornictví, strojírenství, hutnictví, ropě, chemickém průmyslu, elektrárnách a dalších průmyslových a těžebních podnicích.
Jednofázové asynchronní motory se obecně používají v místech, kde není vhodné třífázové napájení, většinou se jedná o miniaturní a malokapacitní motory, které se více používají v domácích spotřebičích, jako jsou elektrické ventilátory, chladničky, klimatizace, vysavače atd.

signální motor
Motor signálu polohy
V současnosti jsou nejreprezentativnější motory polohového signálu: resolver, indukční synchronizátor a samonastavovací úhlový stroj.
(1) Rotační transformátor
Rotační transformátor je elektromagnetický senzor, také známý jako synchronní rozkladač. Jedná se o malý střídavý motor pro měření úhlu, který se používá k měření úhlového posunutí a úhlové rychlosti rotujícího předmětu a skládá se ze statoru a rotoru. Statorové vinutí se používá jako primární strana transformátoru pro příjem budícího napětí a budicí frekvence je obvykle 400, 3000 a 5000 Hz atd. Vinutí rotoru se používá jako sekundární strana transformátoru pro příjem budícího napětí . Vinutí rotoru se používá jako sekundární strana transformátoru pro přivedení indukovaného napětí přes elektromagnetickou vazbu.
Stav aplikace: Rezolver je přesné zařízení pro detekci úhlu, polohy a rychlosti, které je vhodné pro všechny případy rotačních transformátorů využívajících rotační kodér, zejména pro vysokou teplotu, chlad, vlhkost, vysokou rychlost, vysoké vibrace a další příležitosti, kde rotační kodér nemůže řádně pracovat. Vzhledem k výše uvedeným charakteristikám rotačního transformátoru může zcela nahradit fotoelektrický kodér a je široce používán v systému detekce úhlu a polohy v oblastech servo řídicího systému, robotického systému, mechanických nástrojů, automobilu, elektrické energie, metalurgie, textilu , tisk, letecký průmysl, loď, zbraně, elektronika, metalurgie, těžba, ropná pole, ochrana vod, chemický průmysl, lehký průmysl, stavebnictví atd. Může být také použit v transformaci souřadnic, trigonometrické operaci a přenosu úhlových dat a jako dva -fázový fázový posuvník v úhlově-digitálním převodním zařízení.
Indukční synchronizátor
Indukční synchronizátor je složen pomocí principu, že vzájemná indukčnost dvou rovinných vinutí se mění s polohou a lze jej použít k měření lineárního nebo úhlového posuvu. Mezi nimi se měření lineárního posuvu nazývá lineární indukční synchronizátor (nebo dlouhý indukční synchronizátor) a měření úhlového posuvu se nazývá boční indukční synchronizátor (nebo rotační indukční synchronizátor). Synchronizátory mají výhody vysoké přesnosti a rozlišení agregace měření, silnou odolnost proti rušení, nízký vliv prostředím, dlouhou životnost, jednoduchou údržbu, lze je spojovat do různých délek měření a mohou udržovat přesnost jednotky, dobrou zpracovatelnost, nízkou cenu, snadné kopírování a dávková výroba. Proto jsou synchronizátory široce používány ve velkých obráběcích strojích a středně velkých strojích jako digitální posuv pro poskytování zobrazovacích nebo ovládacích zařízení.
Stav aplikace: Indukční synchronizátory jsou široce používány pro měření lineárního posuvu, úhlového posuvu a fyzikálních veličin s nimi souvisejících, jako je rychlost otáčení, vibrace atd. Lineární indukční synchronizátor se často používá ve velkých přesných obráběcích strojích, souřadnicových frézkách a dalších CNC strojích ovládání polohování nástrojů a digitální displej; kruhový indukční synchronizátor se často používá při potřebě dosažení pevného sledování antény, pečlivého vedení, přesných obráběcích strojů nebo měřicích přístrojů a zařízení pro indexování atd.
samonastavovací úhlový stroj
Samonastavovací úhlový stroj je použití samonastavovací charakteristiky úhlu do střídavého napětí nebo ze střídavého napětí do úhlu indukčního mikromotoru, v servosystému se používá jako snímač posunu pro měření úhlu. Samonastavitelné stroje lze také použít k přenosu, transformaci, příjmu a indikaci úhlových signálů na velké vzdálenosti. Dva nebo více motorů jsou propojeny obvody tak, že dvě nebo více rotačních os, které nejsou vzájemně spojeny, automaticky udržují stejnou změnu úhlu nebo se otáčejí synchronně, a tato vlastnost motoru se nazývá samointegrační kroková charakteristika. V servosystému se samoladící stroj použitý na generující straně nazývá vysílač a samoladící stroj použitý na přijímací straně se nazývá přijímač.
Stav aplikace: Samonastavitelný úhlový stroj je široce používán v metalurgii, navigaci a jiném systému indikace synchronizace polohy a orientace a dělostřeleckých, radarových a dalších servosystémech.
Toto je moje shrnutí některých informací o třídě motoru, pokud existují nějaké nedostatky nebo nevhodné místo, vítám zanechat komentář. Děkuji!
Jsme profesionální výrobce elektromotorů v Číně.

Pokud máte nějakou poptávku. Prosím, dejte nám vědět!







2 Odezvy
Ahoj, četl jsem tvůj článek a tvé informace jsou velmi úžasné a pro mě velmi užitečné. Jen tak dál a moc děkuji. 🙂 Více informací na https://tsca.com.ph/
díky za vaše milé komentáře!