 ข้ามไปที่เนื้อหา
ข้ามไปที่เนื้อหา 
เกือบครึ่งหนึ่งของการใช้พลังงานของโลกถูกใช้โดยมอเตอร์ไฟฟ้า ดังนั้นประสิทธิภาพสูงของมอเตอร์ไฟฟ้าจึงกล่าวได้ว่าเป็นมาตรการที่มีประสิทธิภาพที่สุดในการแก้ปัญหาพลังงานของโลก
ชนิดของ มอเตอร์ไฟฟ้า
โดยทั่วไป หมายถึงการเปลี่ยนแปลงของแรงที่เกิดจากการไหลของกระแสในสนามแม่เหล็กไปสู่การกระทำแบบหมุน และในช่วงกว้างๆ ยังรวมถึงการกระทำเชิงเส้นด้วย
ขึ้นอยู่กับประเภทของแหล่งจ่ายไฟที่ใช้ในการขับเคลื่อนมอเตอร์ มีมอเตอร์กระแสตรงและ มอเตอร์ไฟฟ้ากระแสสลับ.
และตามหลักการหมุนของมอเตอร์สามารถแบ่งได้เป็นประเภทคร่าวๆดังนี้ (ยกเว้นมอเตอร์พิเศษ)
มอเตอร์ไฟฟ้ากระแสตรง / มอเตอร์ไฟฟ้ากระแสตรง (กระแสตรง)
มอเตอร์แปรงถ่าน
โดยทั่วไปแล้วมอเตอร์แปรงถ่านที่ใช้กันอย่างแพร่หลายเรียกว่ามอเตอร์ไฟฟ้ากระแสตรง
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
มอเตอร์กระแสตรงไร้แปรงถ่าน
มอเตอร์กระแสตรงไร้แปรงถ่านไม่ใช้แปรงหรือตัวสับเปลี่ยน แต่ใช้ฟังก์ชันสวิตชิ่ง เช่น ทรานซิสเตอร์ เพื่อสลับกระแสและดำเนินการหมุน
สเต็ปเปอร์มอเตอร์.
มอเตอร์นี้ทำงานพร้อมกันกับพลังงานพัลส์ จึงเรียกอีกอย่างว่ามอเตอร์เหนี่ยวนำพัลส์
โดดเด่นด้วยความสามารถในการดำเนินการจัดตำแหน่งที่แม่นยำได้อย่างง่ายดาย
มอเตอร์กระแสสลับ
มอเตอร์แบบอะซิงโครนัส
ไฟฟ้ากระแสสลับสร้างสนามแม่เหล็กหมุนวนในสเตเตอร์ ซึ่งจะสร้างกระแสเหนี่ยวนำในโรเตอร์ ซึ่งจะเกิดปฏิกิริยาโต้ตอบกับมอเตอร์เหนี่ยวนำไฟฟ้ากระแสสลับ
มอเตอร์ซิงโครนัส
ไฟฟ้ากระแสสลับสร้างสนามแม่เหล็กหมุน และโรเตอร์ที่มีขั้วแม่เหล็กจะหมุนตามแรงดึงดูด
- โชคดีที่ความเร็วของการหมุนนั้นซิงโครไนซ์กับความถี่ของแหล่งจ่ายไฟ
เกี่ยวกับกระแส สนามแม่เหล็ก และแรง
อันดับแรก เพื่อประโยชน์ในการอธิบายหลักการของมอเตอร์ที่ตามมา เราจะทบทวนกฎ/กฎพื้นฐานเกี่ยวกับกระแส สนามแม่เหล็ก และแรงกันก่อน
แม้ว่าจะมีความรู้สึกคิดถึง แต่ก็เป็นเรื่องง่ายที่จะลืมความรู้นี้หากคุณไม่ได้ใช้ส่วนประกอบที่เป็นแม่เหล็ก
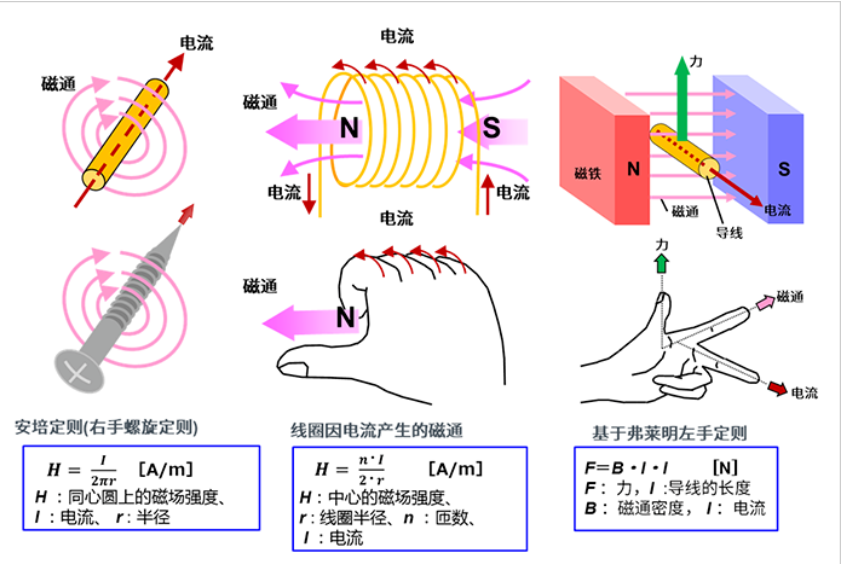
เรารวมรูปภาพและสูตรเพื่ออธิบาย
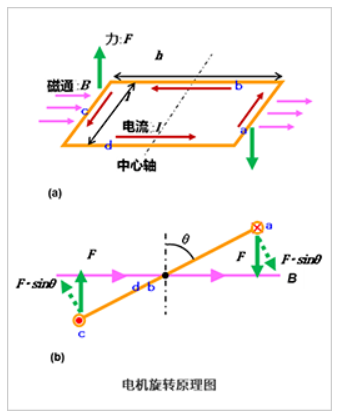
เมื่อโครงลวดเป็นรูปสี่เหลี่ยมผืนผ้า แรงที่กระทำต่อกระแสไฟฟ้าจะถูกนำมาพิจารณาด้วย
แรง F ที่กระทำต่อส่วนของด้าน a และ c คือ
แรงบิดถูกสร้างขึ้นโดยมีแกนกลางเป็นแกนกลาง
ตัวอย่างเช่น เมื่อพิจารณาสถานะที่มีมุมการหมุนเพียง θ แรงที่กระทำมุมฉากกับ b และ d คือ sinθ ดังนั้นแรงบิด Ta ของชิ้นส่วนจะได้รับจาก:
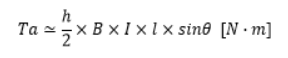
เมื่อพิจารณาส่วน c ในทำนองเดียวกัน แรงบิดจะเพิ่มเป็นสองเท่าและสร้างแรงบิดที่คำนวณได้จากสมการต่อไปนี้

เนื่องจากพื้นที่ของสี่เหลี่ยมผืนผ้าคือ S = h・l การแทนค่าลงในสมการข้างต้นจะได้ผลลัพธ์ดังนี้

สูตรนี้ไม่เพียงใช้กับรูปสี่เหลี่ยมผืนผ้าเท่านั้น แต่ยังใช้กับรูปร่างทั่วไปอื่นๆ เช่น วงกลมด้วย มอเตอร์ใช้หลักการนี้
มอเตอร์ไฟฟ้าหมุนอย่างไร?
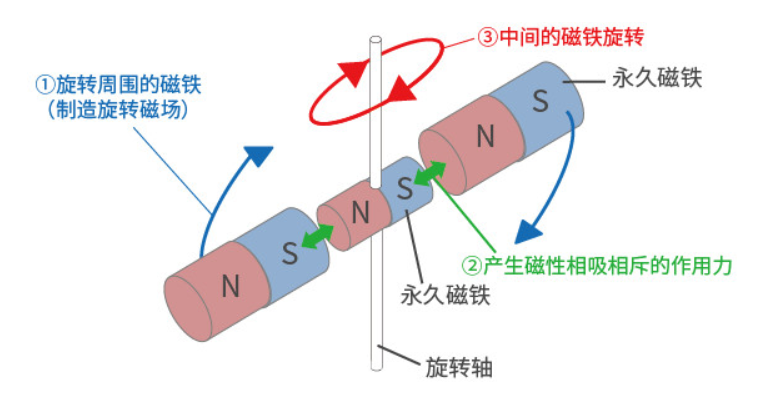
1) มอเตอร์เหนี่ยวนำหมุนด้วยความช่วยเหลือของแม่เหล็กและแรงแม่เหล็ก
รอบแม่เหล็กถาวรที่มีเพลาหมุน
① แม่เหล็กหมุน (เพื่อให้เกิดสนามแม่เหล็กหมุน)
② ตามหลักการที่ว่า ขั้ว N และ S ดึงดูดซึ่งกันและกันที่ขั้วต่างๆ และผลักกันในระดับเดียวกัน
③ แม่เหล็กที่มีเพลาหมุนจะหมุน
นี่คือหลักการพื้นฐานของการหมุนมอเตอร์ไฟฟ้ากระแสสลับ
กระแสที่ไหลในตัวนำทำให้เกิดสนามแม่เหล็กหมุน (แรงแม่เหล็ก) รอบตัวและทำให้แม่เหล็กหมุน ซึ่งเป็นสถานะเดียวกันกับการกระทำเช่นนี้
นอกจากนี้ เมื่อพันลวดเป็นรูปขดลวด แรงแม่เหล็กจะถูกสังเคราะห์ขึ้น ทำให้เกิดฟลักซ์สนามแม่เหล็กขนาดใหญ่ (ฟลักซ์) ที่สร้างขั้ว N และ S
นอกจากนี้ การใส่แกนเหล็กเข้าไปในเส้นลวดคล้ายขดลวด เส้นแรงแม่เหล็กจะผ่านได้ง่ายและสามารถสร้างแรงแม่เหล็กที่แรงขึ้นได้
2) มอเตอร์หมุนจริง
ในที่นี้ ในฐานะวิธีการหมุนมอเตอร์ที่ใช้งานได้จริง เราขอแนะนำวิธีการสร้างสนามแม่เหล็กหมุนโดยใช้มอเตอร์ไฟฟ้ากระแสสลับสามเฟสและขดลวด
(มอเตอร์อุตสาหกรรมไฟฟ้ากระแสสลับสามเฟสคือสัญญาณไฟฟ้ากระแสสลับที่มีระยะห่างห่างกัน 120° ในเฟส)
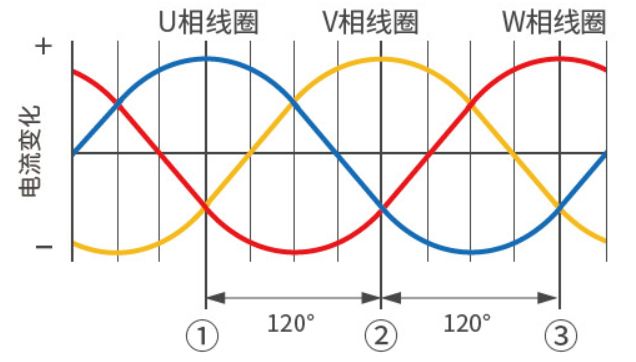
สนามแม่เหล็กสังเคราะห์ในสถานะ ① ด้านบนตรงกับรูป ① ด้านล่าง
สนามแม่เหล็กสังเคราะห์ในสถานะ ② ด้านบนสอดคล้องกับภาพ ② ด้านล่าง
สนามแม่เหล็กสังเคราะห์ในสถานะ ③ ด้านบนสอดคล้องกับรูป ③ ด้านล่าง
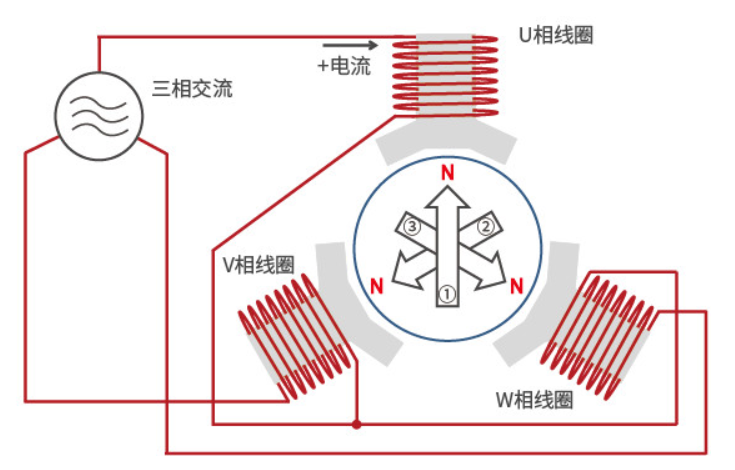
ดังที่ได้กล่าวไว้ข้างต้น ขดลวดของแกนแผลถูกแบ่งออกเป็น 3 เฟส โดยมีการกำหนดค่าช่วง 120° ของขดลวดเฟส U, ขดลวดเฟส V และขดลวดเฟส W โดยขดลวดที่มีแรงดันไฟฟ้าสูงจะสร้างขั้ว N และ ขดลวดที่มีแรงดันต่ำสร้าง S-pole

แต่ละเฟสจะเปลี่ยนไปตามคลื่นไซน์ ดังนั้นขั้ว (ขั้ว N, ขั้ว S) และสนามแม่เหล็ก (แรงแม่เหล็ก) ที่สร้างขึ้นโดยแต่ละขดลวดจะเปลี่ยนไป
ในขณะนี้ ขดลวดที่สร้างขั้ว N เพียงอย่างเดียวจะเปลี่ยนตามลำดับตามขดลวดเฟส U → ขดลวดเฟส V → ขดลวดเฟส W → ขดลวดเฟส U และทำให้เกิดการหมุนขึ้น

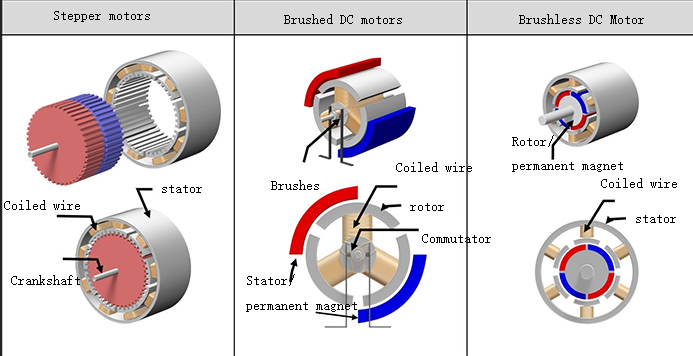
โครงสร้างของมอเตอร์ขนาดเล็ก
รูปต่อไปนี้แสดงโครงสร้างโดยประมาณและการเปรียบเทียบมอเตอร์อุตสาหกรรมสามประเภท: สเต็ปเปอร์มอเตอร์ มอเตอร์กระแสตรงแบบมีแปรงถ่าน (DC) และมอเตอร์กระแสตรงแบบไร้แปรงถ่าน (DC)
ส่วนประกอบพื้นฐานของมอเตอร์เหล่านี้ส่วนใหญ่เป็นขดลวด แม่เหล็ก และโรเตอร์ และยังมีประเภทที่ยึดอยู่กับที่ของขดลวดและแม่เหล็กที่ยึดอยู่กับที่ขึ้นอยู่กับประเภท
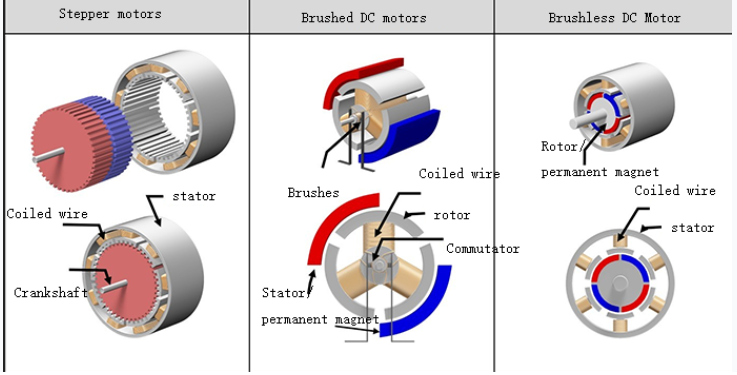
ต่อไปนี้เป็นคำอธิบายของโครงสร้างที่เกี่ยวข้องกับไดอะแกรมตัวอย่าง เนื่องจากอาจมีโครงสร้างอื่นหากแบ่งอย่างระมัดระวัง โปรดเข้าใจว่าโครงสร้างที่นำเสนอในบทความนี้อยู่ภายใต้กรอบขนาดใหญ่
ขดลวดของสเต็ปเปอร์มอเตอร์ที่นี่ได้รับการแก้ไขที่ด้านนอกและแม่เหล็กจะหมุนที่ด้านใน
ที่นี่ แม่เหล็กของมอเตอร์ DC แบบแปรงถูกยึดไว้ที่ด้านนอกและขดลวดจะหมุนที่ด้านใน ต
แปรงถ่านและคอมมิวเตเตอร์มีหน้าที่จ่ายไฟให้กับขดลวดและเปลี่ยนทิศทางของกระแส
ในกรณีของมอเตอร์แบบไร้แปรงถ่าน ขดลวดจะยึดที่ด้านนอกและแม่เหล็กจะหมุนที่ด้านใน
โครงสร้างของมอเตอร์แบบไร้แปรงถ่านนั้นแตกต่างกัน แม้ว่าส่วนประกอบพื้นฐานจะเหมือนกันเนื่องจากมอเตอร์ประเภทต่างๆ รายละเอียดจะอธิบายในแต่ละส่วน
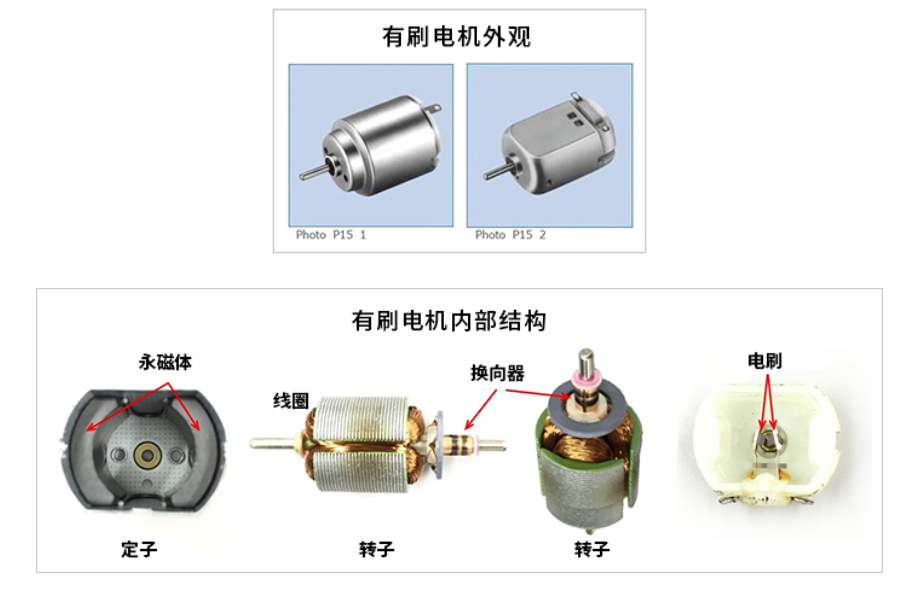
มอเตอร์แปรงถ่าน
โครงสร้างของมอเตอร์กระแสตรงแบบแปรงถ่าน
ด้านล่างนี้คือรูปลักษณ์ของมอเตอร์กระแสตรงแบบแปรงถ่านที่มักใช้ในแบบจำลอง และแผนภาพแผนผังของการแตกย่อยของมอเตอร์ชนิดสามช่อง (3 คอยล์) แบบสองขั้ว (แม่เหล็ก 2 อัน) แบบปกติ หลายท่านอาจมีประสบการณ์ในการถอดประกอบมอเตอร์ไฟฟ้ากระแสตรงและถอดแม่เหล็กออก
คุณจะเห็นว่าแม่เหล็กถาวรของมอเตอร์ DC แบบแปรงถ่านได้รับการแก้ไข และขดลวดของมอเตอร์กระแสตรงแบบมีแปรงถ่านสามารถหมุนรอบจุดศูนย์กลางภายในได้
The fixed side is called the "stator" and the rotating side is called the "rotor".
ต่อไปนี้เป็นภาพร่างโครงสร้างที่แสดงถึงแนวคิดของโครงสร้าง
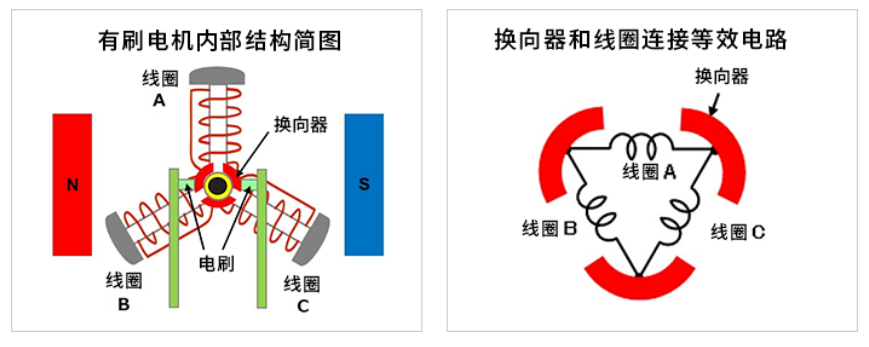
รอบนอกของแกนกลางที่หมุนมีตัวสับเปลี่ยนสามตัว (แผ่นโลหะที่โค้งงอสำหรับการสลับกระแส)
เพื่อหลีกเลี่ยงการสัมผัสกัน สับเปลี่ยนจะถูกกำหนดค่าให้ห่างกัน 120° (360° ÷ 3 ชิ้น) คอมมิวเตเตอร์จะหมุนตามการหมุนของเพลา
คอมมิวเตเตอร์หนึ่งตัวเชื่อมต่อกับปลายคอยล์หนึ่งและปลายคอยล์อีกอัน และตัวสับเปลี่ยนสามตัวและคอยล์สามตัวรวมกันเป็นเครือข่ายวงจร
แปรงสองตัวได้รับการแก้ไขที่ 0° และ 180° เพื่อให้สัมผัสกับตัวสับเปลี่ยน
แหล่งจ่ายไฟ DC ภายนอกเชื่อมต่อกับแปรงถ่านและกระแสไหลในแปรงพาธ → คอมมิวเตเตอร์ → ขดลวด → แปรงถ่าน
หลักการหมุนของมอเตอร์ดีซีแบบแปรงถ่าน
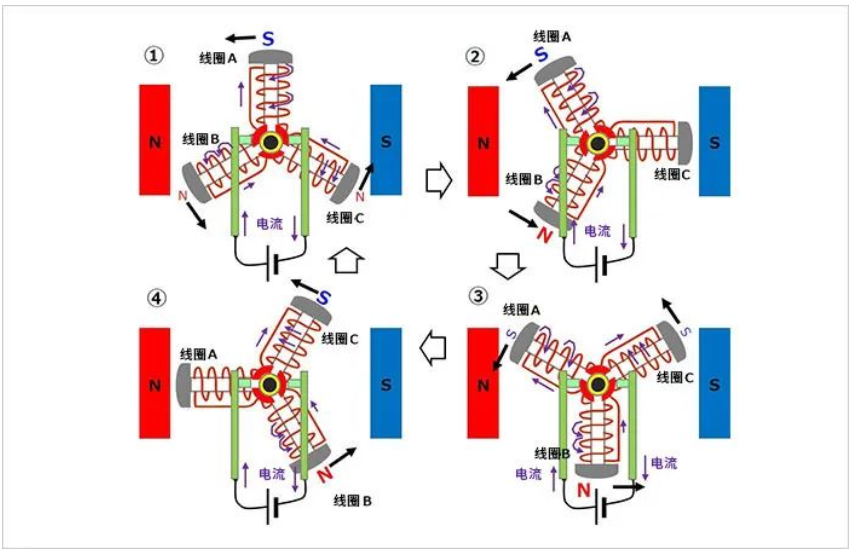
① หมุนทวนเข็มนาฬิกาจากสถานะเริ่มต้น
คอยล์ A อยู่ที่ส่วนบนสุดและเชื่อมต่อแหล่งจ่ายเครื่องมือไฟฟ้าเข้ากับแปรง ตั้งค่าด้านซ้ายเป็น (+) และด้านขวาเป็น (-)
กระแสขนาดใหญ่ไหลจากแปรงด้านซ้ายผ่านคอมมิวเตเตอร์ไปยังขดลวด A
นี่คือโครงสร้างที่ส่วนบน (ด้านนอก) ของขดลวด A กลายเป็นเสา S
และเนื่องจาก 1/2 ของกระแสจากขดลวด A ไหลจากแปรงด้านซ้ายไปยังขดลวด B และ C ในทิศทางตรงกันข้ามกับขดลวด A ด้านนอกของขดลวด B และ C จึงกลายเป็นขั้ว N ที่อ่อนแอ (ระบุด้วยตัวอักษรที่เล็กกว่าเล็กน้อยใน รูป).
สนามแม่เหล็กที่สร้างขึ้นในขดลวดเหล่านี้และผลกระทบที่น่ารังเกียจและดึงดูดใจของแม่เหล็กทำให้ขดลวดอยู่ภายใต้แรงหมุนทวนเข็มนาฬิกา
② หมุนทวนเข็มนาฬิกาเพิ่มเติม
ต่อไป สมมติว่าแปรงด้านขวาสัมผัสกับตัวสับเปลี่ยนทั้งสองในสถานะที่ขดลวด A หมุนทวนเข็มนาฬิกา 30°
กระแสของขดลวด A ไหลอย่างต่อเนื่องจากแปรงด้านซ้ายผ่านแปรงด้านขวา และด้านนอกของขดลวดยังคงเป็นขั้ว S
กระแสเดียวกันกับขดลวด A ไหลผ่านขดลวด B และด้านนอกของขดลวด B จะมีขั้ว N ที่แรงกว่า
เนื่องจากปลายของขดลวด C ถูกทำให้สั้นลงโดยแปรง จึงไม่มีกระแสไหลและไม่มีสนามแม่เหล็กเกิดขึ้น
แม้ว่าในกรณีนี้จะมีแรงหมุนทวนเข็มนาฬิกาก็ตาม
ขดลวดที่อยู่ด้านบนจาก ③ ถึง ④ จะถูกบังคับให้เคลื่อนที่ไปทางซ้ายอย่างต่อเนื่อง และขดลวดด้านล่างจะถูกบังคับให้เคลื่อนที่ไปทางขวาอย่างต่อเนื่อง และหมุนทวนเข็มนาฬิกาต่อไป
เมื่อขดลวดหมุนทุกๆ 30° ถึง ③ และ ④ ด้านนอกของขดลวดจะกลายเป็นเสา S เมื่อขดลวดอยู่เหนือแกนนอนตรงกลาง เมื่อขดลวดอยู่ด้านล่าง จะกลายเป็นขั้ว N และเคลื่อนที่ซ้ำ
กล่าวอีกนัยหนึ่ง ขดลวดด้านบนจะถูกบังคับโดยแรงที่เคลื่อนที่ไปทางซ้ายซ้ำๆ และขดลวดด้านล่างจะถูกบังคับด้วยแรงที่เคลื่อนที่ไปทางขวาซ้ำๆ (ทั้งทวนเข็มนาฬิกา) ทำให้โรเตอร์หมุนทวนเข็มนาฬิกาตลอดเวลา
หากไฟฟ้าเชื่อมต่อกับแปรงซ้ายตรงข้าม (-) และแปรงขวา (+) สนามแม่เหล็กจะถูกสร้างขึ้นในขดลวดสเตเตอร์ในทิศทางตรงกันข้าม ดังนั้นแรงที่กระทำต่อขดลวดจะเคลื่อนที่ไปในทิศทางตรงกันข้ามและกลายเป็นการหมุนตามเข็มนาฬิกา .
นอกจากนี้ เมื่อไฟฟ้าดับ โรเตอร์ของมอเตอร์แบบแปรงถ่านจะหยุดหมุนเนื่องจากไม่มีสนามแม่เหล็กที่ทำให้มอเตอร์หมุน
มอเตอร์ไร้แปรงถ่านสามเฟสแบบเต็มคลื่น
ลักษณะและโครงสร้างของมอเตอร์ไร้แปรงถ่านสามเฟสแบบเต็มคลื่น
รูปภาพต่อไปนี้แสดงตัวอย่างรูปลักษณ์และโครงสร้างของมอเตอร์แบบไร้แปรงถ่าน
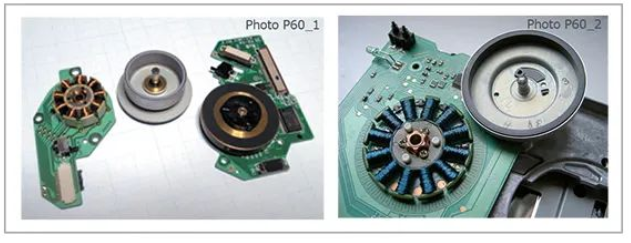
ด้านซ้ายเป็นตัวอย่างของมอเตอร์แกนที่ใช้ในการหมุนแผ่นดิสก์ในอุปกรณ์เล่นแผ่นดิสก์ มี 9 คอยล์สามเฟส x 3 ทางด้านขวาเป็นตัวอย่างของมอเตอร์สปินเดิลสำหรับอุปกรณ์ FDD ที่มี 12 คอยล์ (สามเฟส x 4) ขดลวดได้รับการแก้ไขบนกระดานและพันบนแกน
ส่วนรูปดิสก์ทางด้านขวาของขดลวดคือโรเตอร์แม่เหล็กถาวร เพลาของโรเตอร์ถูกเสียบเข้าที่ศูนย์กลางของขดลวดและครอบคลุมส่วนของขดลวด และแม่เหล็กถาวรจะล้อมรอบขอบของขดลวด
โครงสร้างภายในของมอเตอร์ไร้แปรงถ่านสามเฟสแบบเต็มคลื่นและวงจรสมมูลของการเชื่อมต่อขดลวด
ต่อไปเป็นภาพร่างของโครงสร้างภายในและวงจรสมมูลของการต่อขดลวด
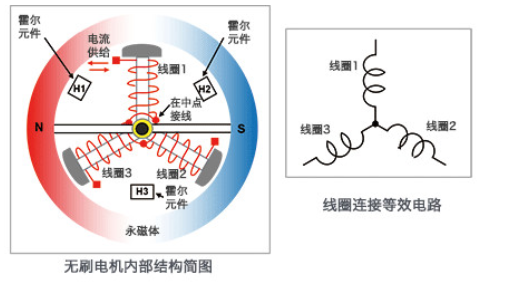
ภาพร่างโครงสร้างภายในนี้เป็นตัวอย่างของมอเตอร์ 2 ขั้ว (2 แม่เหล็ก) 3 ช่อง (3 ขดลวด) ที่มีโครงสร้างเรียบง่าย คล้ายกับโครงสร้างของมอเตอร์แปรงถ่านที่มีจำนวนขั้วและช่องเท่ากัน แต่ด้านขดลวดจะยึดอยู่กับที่และแม่เหล็กสามารถหมุนได้ แน่นอนว่าไม่มีแปรง
ในกรณีนี้ ขดลวดเชื่อมต่อเป็นรูปตัว Y และใช้ส่วนประกอบเซมิคอนดักเตอร์เพื่อจ่ายกระแสให้กับขดลวด ควบคุมการไหลเข้าและออกของกระแสตามตำแหน่งของแม่เหล็กหมุน
ในตัวอย่างนี้ องค์ประกอบ Hall ใช้เพื่อตรวจจับตำแหน่งของแม่เหล็ก องค์ประกอบ Hall ได้รับการกำหนดค่าระหว่างขดลวดและขดลวดเพื่อตรวจจับแรงดันไฟฟ้าที่สร้างขึ้นและใช้เป็นข้อมูลตำแหน่งตามความแรงของสนามแม่เหล็ก ในรูปภาพของมอเตอร์สปินเดิล FDD ที่ให้ไว้ก่อนหน้านี้ คุณยังสามารถเห็นองค์ประกอบ Hall ที่ใช้ตรวจจับตำแหน่งระหว่างคอยล์และคอยล์ (เหนือคอยล์)
องค์ประกอบ Hall เป็นที่รู้จักกันดีว่าเป็นเซ็นเซอร์แม่เหล็ก
มันสามารถแปลงขนาดของสนามแม่เหล็กเป็นขนาดของแรงดันไฟฟ้าและระบุทิศทางของสนามแม่เหล็กในแง่บวกหรือลบ
ด้านล่างนี้เป็นแผนภาพที่แสดงผล Hall
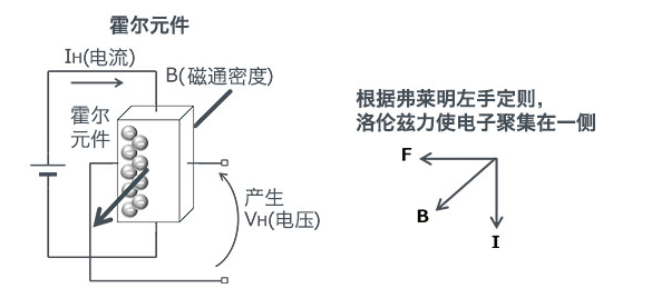
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
แรงดันผลลัพธ์ VH แสดงด้วยสมการต่อไปนี้
VH = (KH / d)・IH・B ※KH: ค่าสัมประสิทธิ์ฮอลล์, d: ความหนาของพื้นผิวการซึมผ่านของฟลักซ์
ตามที่แสดงไว้ในสูตร ยิ่งกระแสสูง แรงดันยิ่งสูงขึ้น คุณสมบัตินี้มักใช้เพื่อตรวจจับตำแหน่งของโรเตอร์ (แม่เหล็ก)
หลักการหมุนของมอเตอร์ไร้แปรงถ่านสามเฟสแบบเต็มคลื่น
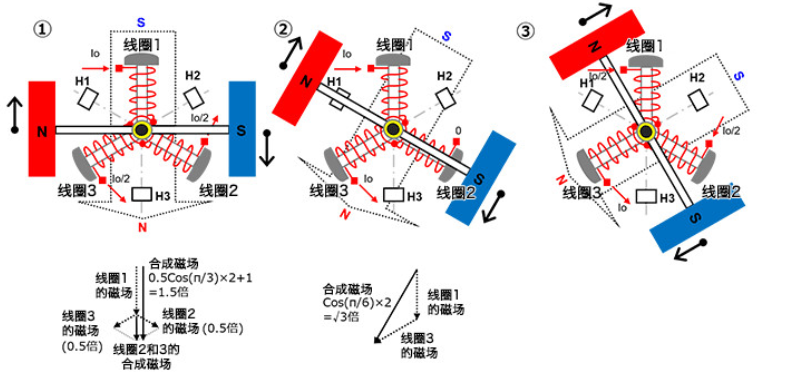
หลักการหมุนของมอเตอร์ไร้แปรงถ่านจะอธิบายในขั้นตอน ① ถึง ⑥ ต่อไปนี้ เพื่อให้เข้าใจง่าย แม่เหล็กถาวรถูกทำให้ง่ายขึ้นจากวงกลมเป็นสี่เหลี่ยมผืนผ้าที่นี่
①
ในขดลวด 3 เฟส ให้ยึดคอยล์ 1 ที่ 12 นาฬิกา คอยล์ 2 จับที่ 4 นาฬิกา และคอยล์ 3 ไว้ที่ 8 นาฬิกา ให้ขั้ว N ของแม่เหล็กถาวรแบบ 2 ขั้วอยู่ทางด้านซ้ายและขั้ว S ทางด้านขวาและหมุนได้
ทำให้กระแส Io ไหลเข้าขดลวด 1 เพื่อสร้างสนามแม่เหล็ก S-pole ที่ด้านนอกของขดลวด ปล่อยให้กระแส Io/2 ไหลออกจากขดลวด 2 และขดลวด 3 เพื่อสร้างสนามแม่เหล็กขั้ว N ที่ด้านนอกของขดลวด
เมื่อสนามแม่เหล็กของขดลวด 2 และ 3 ถูกสังเคราะห์ด้วยเวกเตอร์ สนามแม่เหล็กขั้ว N จะถูกสร้างขึ้นด้านล่าง ซึ่งเป็น 0.5 เท่าของขนาดของสนามแม่เหล็กที่สร้างขึ้นเมื่อกระแส Io ผ่านขดลวด และกลายเป็น 1.5 เท่าของขนาดเมื่อ เพิ่มเข้าไปในสนามแม่เหล็กของขดลวด 1 สิ่งนี้สร้างสนามแม่เหล็กสังเคราะห์ที่มุม 90° เมื่อเทียบกับแม่เหล็กถาวร เพื่อให้สามารถสร้างแรงบิดสูงสุดและแม่เหล็กถาวรจะหมุนตามเข็มนาฬิกา
เมื่อกระแสในขดลวด 2 ลดลงและกระแสในขดลวด 3 เพิ่มขึ้นตามตำแหน่งที่หมุน สนามแม่เหล็กสังเคราะห์จะหมุนตามเข็มนาฬิกาและแม่เหล็กถาวรจะหมุนต่อไป
②
ในสถานะหมุน 30° กระแส Io จะไหลเข้าขด 1 ดังนั้นกระแสในขด 2 จะเป็นศูนย์ ทำให้กระแส Io ไหลออกจากขด 3
ด้านนอกของคอยล์ 1 จะกลายเป็นเสา S และด้านนอกของคอยล์ 3 จะกลายเป็นขั้ว N เมื่อเวกเตอร์ถูกสังเคราะห์ขึ้น สนามแม่เหล็กที่ผลิตขึ้นจะเท่ากับ √3 (≈1.72) ของสนามแม่เหล็กที่สร้างขึ้นเมื่อ Io ปัจจุบันผ่านขดลวดหนึ่งขดลวด นอกจากนี้ยังสร้างสนามแม่เหล็กสังเคราะห์ที่มุม 90° เทียบกับสนามแม่เหล็กของแม่เหล็กถาวร และหมุนตามเข็มนาฬิกา
เมื่อกระแสไหลเข้าของขดลวด 1 ลดลงตามตำแหน่งการหมุน กระแสไหลเข้าของขดลวด 2 จะเพิ่มขึ้นจากศูนย์ และกระแสไหลออกของขดลวด 3 จะเพิ่มขึ้นเป็น Io สนามแม่เหล็กสังเคราะห์จะหมุนตามเข็มนาฬิกาด้วย และสนามแม่เหล็กถาวร แม่เหล็กยังคงหมุนต่อไป
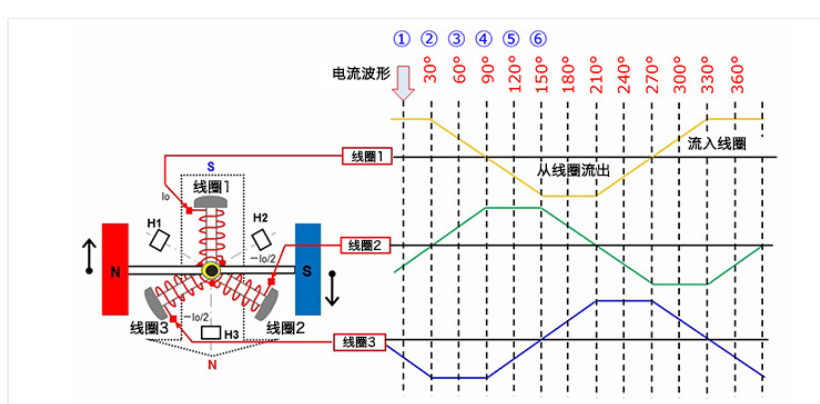
สมมติว่ากระแสในแต่ละเฟสเป็นไซน์ไซด์ ค่าปัจจุบันคือ Io × sin(π⁄3) = Io × √3⁄2 โดยการสังเคราะห์เวกเตอร์ของสนามแม่เหล็ก ขนาดสนามแม่เหล็กทั้งหมดคือ (√3⁄2)2 × 2 = 1.5 เท่าของสนามแม่เหล็กที่เกิดจากขดลวดหนึ่งเส้น เมื่อกระแสในแต่ละเฟสเป็นไซน์ ขนาดของสนามแม่เหล็กสังเคราะห์เวกเตอร์คือ 1.5 เท่าของสนามแม่เหล็กที่เกิดจากขดลวดหนึ่งขดลวดโดยไม่คำนึงถึงตำแหน่งของแม่เหล็กถาวร และสนามแม่เหล็กอยู่ที่มุม 90° เทียบกับ สนามแม่เหล็กของแม่เหล็กถาวร
③
ในสถานะที่การหมุนดำเนินต่อไปเป็นเวลา 30° กระแส Io/2 จะไหลเข้าขด 1 กระแส Io/2 จะไหลเข้าขด 2 และกระแส Io จะไหลออกจากขด 3
ด้านนอกของคอยล์ 1 จะกลายเป็นเสา S ด้านนอกของคอยล์ 2 จะกลายเป็นเสา S และด้านนอกของคอยล์ 3 จะกลายเป็นขั้ว N เมื่อเวกเตอร์ถูกสังเคราะห์ขึ้น สนามแม่เหล็กที่สร้างขึ้นจะเป็น 1.5 เท่าของสนามแม่เหล็กที่สร้างขึ้นเมื่อ Io ปัจจุบันไหลผ่านขดลวดหนึ่งเส้น (เหมือนกับ ①) ที่นี่ก็เช่นกัน สนามแม่เหล็กสังเคราะห์ถูกสร้างขึ้นที่มุม 90° เทียบกับสนามแม่เหล็กของแม่เหล็กถาวร และหมุนตามเข็มนาฬิกา
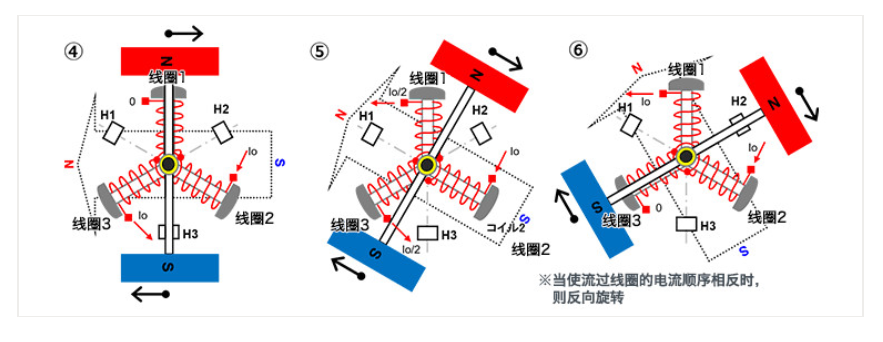
④~⑥
หมุนในลักษณะเดียวกับ ① ถึง ③
ด้วยวิธีนี้หากกระแสที่ไหลเข้าสู่ขดลวดถูกสลับอย่างต่อเนื่องตามลำดับตามตำแหน่งของแม่เหล็กถาวร แม่เหล็กถาวรจะหมุนในทิศทางที่คงที่ ในทำนองเดียวกัน หากกระแสไฟฟ้ากลับด้านและทิศทางของสนามแม่เหล็กสังเคราะห์กลับด้าน กระแสไฟฟ้าจะหมุนทวนเข็มนาฬิกา
แผนภาพต่อไปนี้แสดงกระแสในแต่ละคอยล์สำหรับแต่ละขั้นตอนที่ 1 ถึง ⑥ ด้านบนติดต่อกัน ควรเข้าใจความสัมพันธ์ระหว่างการเปลี่ยนแปลงในปัจจุบันและการหมุนเวียนตามคำอธิบายข้างต้น
สเต็ปเปอร์มอเตอร์
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
โครงสร้างของสเต็ปเปอร์มอเตอร์ (ไบโพลาร์สองเฟส)
แผนภาพต่อไปนี้จากซ้ายไปขวา แสดงตัวอย่างลักษณะที่ปรากฏของสเต็ปเปอร์มอเตอร์ ภาพร่างของโครงสร้างภายใน และภาพร่างแนวคิดของโครงสร้าง
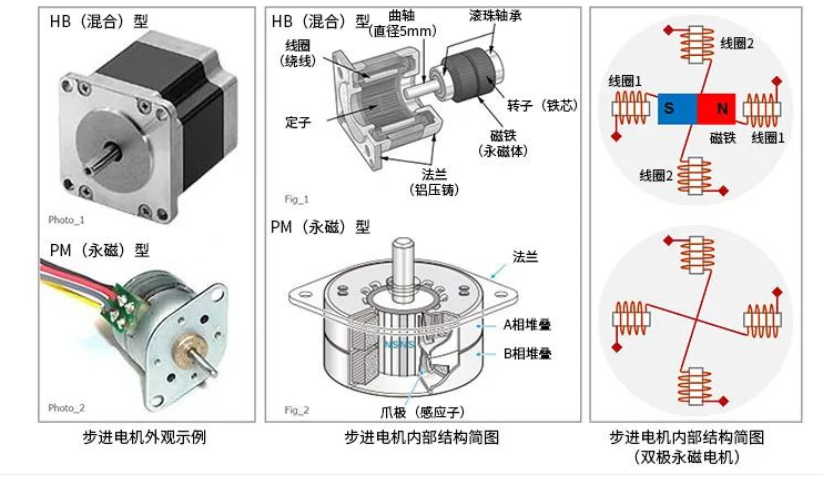
ในตัวอย่างลักษณะที่ปรากฏ แสดงลักษณะของสเต็ปเปอร์มอเตอร์ประเภท HB (ไฮบริด) และ PM (แม่เหล็กถาวร) แผนภาพโครงสร้างตรงกลางมีให้สำหรับประเภท HB และประเภท PM ด้วย
สเต็ปเปอร์มอเตอร์เป็นโครงสร้างที่ขดลวดได้รับการแก้ไขและมีแม่เหล็กถาวรหมุนอยู่ แผนภาพแนวคิดของโครงสร้างภายในของสเต็ปเปอร์มอเตอร์ทางด้านขวาเป็นตัวอย่างของมอเตอร์ PM ที่ใช้ขดลวดสองเฟส (สองชุด) ในตัวอย่างโครงสร้างสเต็ปเปอร์มอเตอร์พื้นฐาน ขดลวดได้รับการกำหนดค่าที่ด้านนอก และแม่เหล็กถาวรได้รับการกำหนดค่าที่ด้านใน นอกจากคอยล์ 2 เฟสแล้ว ยังมีประเภทที่มีจำนวนเฟสมากกว่า เช่น 3 เฟสและ 5 เฟส
สเต็ปเปอร์มอเตอร์บางตัวมีโครงสร้างอื่นที่แตกต่างกัน แต่โครงสร้างพื้นฐานของสเต็ปเปอร์มอเตอร์ได้ระบุไว้ในบทความนี้เพื่ออำนวยความสะดวกในการแนะนำหลักการทำงานของสเต็ปเปอร์มอเตอร์ ในบทความนี้ เราหวังว่าจะเข้าใจโครงสร้างพื้นฐานของสเต็ปเปอร์มอเตอร์ที่มีขดลวดคงที่และแม่เหล็กถาวรที่หมุนได้
หลักการทำงานพื้นฐานของสเต็ปเปอร์มอเตอร์ (การกระตุ้นเฟสเดียว)
แผนภาพต่อไปนี้ใช้เพื่อแนะนำหลักการทำงานพื้นฐานของสเต็ปเปอร์มอเตอร์ นี่เป็นตัวอย่างการกระตุ้นสำหรับแต่ละเฟส (ชุดคอยล์) ของคอยล์ชนิดไบโพลาร์สองเฟสด้านบน หลักฐานของแผนภาพคือสถานะเปลี่ยนจาก 1 เป็น ④ ขดลวดประกอบด้วยคอยล์ 1 และคอยล์ 2 ตามลำดับ นอกจากนี้ลูกศรปัจจุบันยังระบุทิศทางการไหลของกระแสอีกด้วย
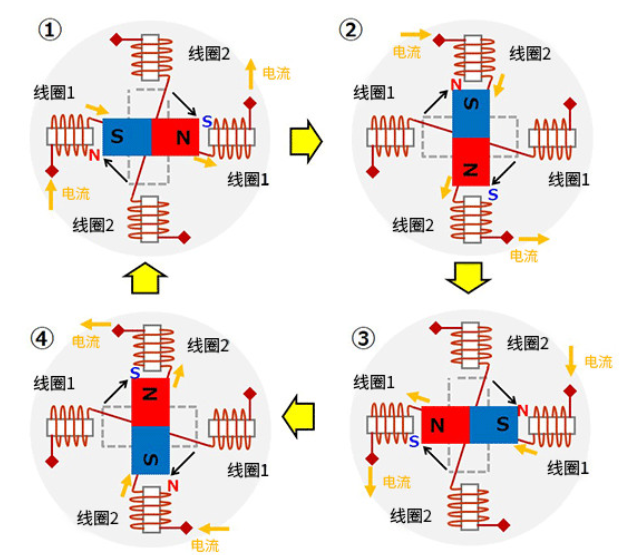
①
・ทำให้กระแสไหลจากด้านซ้ายของคอยล์ 1 และออกจากด้านขวาของคอยล์ 1
・อย่าให้กระแสไหลผ่านคอยล์ 2
・ในเวลานี้ ด้านในของคอยล์ซ้าย 1 กลายเป็น N และด้านในของคอยล์ขวา 1 กลายเป็น S
・ด้วยเหตุนี้ แม่เหล็กถาวรตรงกลางจึงถูกดึงดูดโดยสนามแม่เหล็กของคอยล์ 1 และเปลี่ยนไปทางด้านซ้าย S และด้านขวา N แล้วหยุด
②
・กระแสของคอยล์ 1 หยุดเพื่อให้กระแสไหลเข้าจากด้านบนของคอยล์ 2 และออกจากด้านล่างของคอยล์ 2
・ด้านในของคอยล์บน 2 เปลี่ยนเป็น N และด้านในของคอยล์ล่าง 2 เปลี่ยนเป็น S
・แม่เหล็กถาวรถูกดึงดูดโดยสนามแม่เหล็กและหมุน 90° ตามเข็มนาฬิกาเพื่อหยุด
③
・กระแสของคอยล์ 2 หยุดเพื่อให้กระแสไหลเข้าจากด้านขวาของคอยล์ 1 และออกจากด้านซ้ายของคอยล์ 1
・ด้านในของคอยล์ด้านซ้าย 1 กลายเป็น S และด้านในของคอยล์ด้านขวา 1 กลายเป็น N
・แม่เหล็กถาวรถูกดึงดูดโดยสนามแม่เหล็กและหมุนตามเข็มนาฬิกาอีก 90° เพื่อหยุด
④
・หยุดกระแสในคอยล์ 1 เพื่อให้กระแสไหลเข้าจากด้านล่างของคอยล์ 2 และออกจากด้านบนของคอยล์ 2
・ด้านในของคอยล์บน 2 กลายเป็น S และด้านในของคอยล์ล่าง 2 กลายเป็น N
・แม่เหล็กถาวรถูกดึงดูดโดยสนามแม่เหล็กและหมุนตามเข็มนาฬิกาอีก 90° เพื่อหยุด
สเต็ปเปอร์มอเตอร์สามารถหมุนได้โดยการเปลี่ยนกระแสที่ไหลผ่านขดลวดโดยวงจรอิเล็กทรอนิกส์ตามลำดับ 1 ถึง ④ ด้านบน ในตัวอย่างนี้ การทำงานของสวิตช์แต่ละครั้งจะทำให้สเต็ปเปอร์มอเตอร์หมุน 90°
นอกจากนี้ เมื่อกระแสไหลผ่านคอยล์อย่างต่อเนื่อง สถานะหยุดสามารถคงอยู่ได้ และสเต็ปเปอร์มอเตอร์จะมีแรงบิดที่ค้างอยู่ได้ บังเอิญถ้าลำดับของกระแสที่ไหลผ่านขดลวดกลับด้าน สเต็ปเปอร์มอเตอร์สามารถหมุนกลับด้านได้
ค้นหาผู้ผลิตมอเตอร์อุตสาหกรรมมืออาชีพ - Dongchun motor China







