 ข้ามไปที่เนื้อหา
ข้ามไปที่เนื้อหา 
เราทุกคนรู้ดีว่าตัวแปลงความถี่เป็นเทคโนโลยีที่ควรเชี่ยวชาญในงานไฟฟ้า และการใช้ตัวแปลงความถี่เพื่อควบคุมมอเตอร์เป็นวิธีการทั่วไปในการควบคุมไฟฟ้า บางอย่างก็ต้องการความสามารถเช่นกัน
วันนี้เราจะมาสรุปและเรียบเรียงความรู้ที่เกี่ยวข้องกับความรู้ที่มีจำกัดของเรา เนื้อหาอาจซ้ำซ้อน แต่จุดมุ่งหมายคือการแบ่งปันความสัมพันธ์อันยอดเยี่ยมระหว่างตัวแปลงความถี่และมอเตอร์กับทุกคน
ก่อนอื่น ทำไมต้องใช้ตัวแปลงความถี่ในการควบคุมมอเตอร์?
ก่อนอื่นเรามาทำความเข้าใจอุปกรณ์ทั้งสองนี้กันแบบสั้นๆ กันก่อน
มอเตอร์เป็นโหลดอุปนัยที่ขัดขวางการเปลี่ยนแปลงของกระแส ในระหว่างการสตาร์ทจะทำให้เกิดการเปลี่ยนแปลงครั้งใหญ่ในปัจจุบัน
ตัวแปลงความถี่เป็นอุปกรณ์ที่ใช้การเปิด-ปิดของอุปกรณ์เซมิคอนดักเตอร์กำลังเพื่อแปลงความถี่ของแหล่งจ่ายไฟให้เป็นความถี่อื่นของพลังงานไฟฟ้าเพื่อวัตถุประสงค์ในการควบคุม ส่วนใหญ่ประกอบด้วยสองส่วน: วงจรหลัก (โมดูลวงจรเรียงกระแส ตัวเก็บประจุด้วยไฟฟ้า และโมดูลอินเวอร์เตอร์) และวงจรควบคุม (แผงจ่ายไฟแบบสวิตช์และแผงวงจรควบคุม)

เพื่อลดกระแสสตาร์ทของมอเตอร์ไฟฟ้า โดยเฉพาะมอเตอร์ที่มีกำลังสูงกว่า เมื่อกำลังเพิ่มขึ้น กระแสสตาร์ทก็จะเพิ่มขึ้นด้วย กระแสไฟสตาร์ทที่มากเกินไปอาจสร้างภาระให้กับเครือข่ายการจ่ายพลังงานได้มากขึ้น อย่างไรก็ตาม ตัวแปลงความถี่สามารถแก้ปัญหานี้ได้โดยการอนุญาตให้สตาร์ทเครื่องได้อย่างราบรื่นโดยไม่ทำให้กระแสสตาร์ทมากเกินไป
ฟังก์ชั่นอีกอย่างหนึ่งของการใช้ตัวแปลงความถี่คือการควบคุมความเร็วสำหรับมอเตอร์ ในหลายกรณี การควบคุมความเร็วของมอเตอร์เป็นสิ่งจำเป็นเพื่อให้บรรลุประสิทธิภาพการผลิตที่ดีขึ้น ตัวแปลงความถี่ทราบมาโดยตลอดถึงความสามารถในการควบคุมความเร็วโดยการเปลี่ยนความถี่ต้นทาง

วิธีการควบคุมตัวแปลงความถี่มีอะไรบ้าง?
ห้าวิธีที่ใช้บ่อยที่สุดในการควบคุมมอเตอร์ด้วยตัวแปลงความถี่มีดังนี้:
แรงดันไฟฟ้าขาออกของตัวแปลงความถี่อเนกประสงค์แรงดันต่ำคือ 380-650V, กำลังขับคือ 0.75-400kW, ความถี่ในการทำงานคือ 0-400Hz และวงจรหลักใช้วงจร AC-DC-AC วิธีการควบคุมมีมาสี่ชั่วอายุคนแล้ว
วิธีการควบคุมการปรับความกว้างพัลส์ไซน์ (SPWM) ด้วย U/f=C
ลักษณะของมันคือโครงสร้างวงจรควบคุมที่เรียบง่าย ต้นทุนต่ำ ความแข็งทางกลที่ดี และสามารถตอบสนองข้อกำหนดการควบคุมความเร็วที่ราบรื่นของระบบเกียร์ทั่วไป มีการใช้กันอย่างแพร่หลายในอุตสาหกรรมต่างๆ
อย่างไรก็ตาม ที่ความถี่ต่ำ เนื่องจากแรงดันไฟฟ้าเอาท์พุตต่ำกว่าและอิทธิพลที่สำคัญของแรงบิดต่อการลดลงของความต้านทานสเตเตอร์ แรงบิดเอาท์พุตสูงสุดจึงลดลง
นอกจากนี้คุณลักษณะทางกลของมันยังไม่ยากเท่ากับมอเตอร์กระแสตรงอีกด้วย
ความสามารถในการบิดแบบไดนามิกและประสิทธิภาพการควบคุมความเร็วคงที่ยังไม่เป็นที่น่าพอใจ ประสิทธิภาพของระบบก็ไม่สูงเช่นกัน เส้นโค้งควบคุมจะเปลี่ยนไปตามการเปลี่ยนแปลงโหลด การตอบสนองของแรงบิดช้า อัตราการใช้แรงบิดของมอเตอร์ไม่สูง ประสิทธิภาพลดลงที่ความเร็วต่ำเนื่องจากความต้านทานสเตเตอร์และผลกระทบโซนตายของอินเวอร์เตอร์ในขณะที่ความเสถียรลดลง ฯลฯ ดังนั้น ผู้คนจึงทำการวิจัยการควบคุมความเร็วตัวแปรความถี่ที่ควบคุมโดยเวกเตอร์

วิธีการควบคุมการปรับความกว้างพัลส์เวกเตอร์อวกาศ (SVPWM)
ขึ้นอยู่กับผลกระทบในการสร้างโดยรวมของรูปคลื่นสามเฟส โดยมีจุดมุ่งหมายในการประมาณวิถีสนามแม่เหล็กหมุนเป็นวงกลมในอุดมคติของช่องว่างอากาศของมอเตอร์ โดยจะสร้างรูปคลื่นมอดูเลตแบบสามเฟสและควบคุมโดยการประมาณวงกลมโดยใช้รูปหลายเหลี่ยมที่จารึกไว้
หลังจากการใช้งานจริง มีการปรับปรุงโดยการแนะนำการชดเชยความถี่เพื่อกำจัดข้อผิดพลาดในการควบคุมความเร็ว การประมาณค่าแอมพลิจูดของฟลักซ์ผ่านการป้อนกลับเพื่อกำจัดอิทธิพลของความต้านทานสเตเตอร์ที่ความเร็วต่ำ และลูปปิดสำหรับแรงดันและกระแสเอาท์พุตเพื่อปรับปรุงความแม่นยำและเสถียรภาพแบบไดนามิก
อย่างไรก็ตาม มีการเชื่อมโยงวงจรควบคุมจำนวนมาก ยังไม่มีการปรับแรงบิด ดังนั้นประสิทธิภาพของระบบจึงไม่ได้รับการปรับปรุงโดยพื้นฐาน

วิธีควบคุมเวคเตอร์ (VC)
วิธีการควบคุมความเร็วความถี่แปรผันในการควบคุมเวกเตอร์คือการแปลงกระแสสเตเตอร์ Ia, Ib, Ic ของมอเตอร์อะซิงโครนัสให้เป็นกระแสสลับสองเฟส Ia1Ib1 ภายใต้ระบบพิกัดที่อยู่นิ่งผ่านการแปลงสามเฟสเป็นสองเฟส จากนั้นพวกมันจะถูกแปลงเป็นกระแส DC Im1 และ It1 ภายใต้ระบบพิกัดการหมุนแบบซิงโครนัสผ่านการแปลงการหมุนการวางแนวสนามโรเตอร์ (โดยที่ Im1 สอดคล้องกับกระแสกระตุ้นในมอเตอร์กระแสตรง; It1 สอดคล้องกับกระแสกระดองตามสัดส่วนของแรงบิด) ปริมาณการควบคุมสำหรับมอเตอร์กระแสตรงได้มาจากการจำลองวิธีการควบคุม หลังจากที่ทำการแปลงพิกัดผกผันที่สอดคล้องกันแล้ว สามารถควบคุมมอเตอร์แบบอะซิงโครนัสได้

โดยพื้นฐานแล้ว มอเตอร์ AC เทียบเท่ากับมอเตอร์กระแสตรงและมีการควบคุมแบบอิสระแยกกันสำหรับส่วนประกอบความเร็วและสนามแม่เหล็ก โดยการควบคุมฟลักซ์ของโรเตอร์ก่อน จากนั้นจึงแยกกระแสสเตเตอร์ออกเป็นแรงบิดและส่วนประกอบของสนามแม่เหล็ก ตามด้วยการควบคุมมุมฉากหรือแยกส่วนผ่านการแปลงพิกัด ข้อเสนอของวิธีการควบคุมเวกเตอร์ถือเป็นการปฏิวัติแต่ในทางปฏิบัติยาก เนื่องจากความยากลำบากในการสังเกตฟลักซ์ของโรเตอร์อย่างแม่นยำ ซึ่งส่งผลกระทบอย่างมากต่อคุณลักษณะของระบบ เช่นเดียวกับการแปลงการหมุนของเวกเตอร์ที่ซับซ้อนซึ่งใช้ในระหว่างการควบคุมมอเตอร์กระแสตรงที่เทียบเท่า ทำให้ผลลัพธ์จริงถูกกดดันอย่างหนักเพื่อให้ได้ผลลัพธ์เชิงวิเคราะห์ในอุดมคติ
วิธีการเฉพาะคือ:
ควบคุมฟลักซ์แม่เหล็กสเตเตอร์โดยการแนะนำผู้สังเกตการณ์ฟลักซ์แม่เหล็กสเตเตอร์เพื่อให้เกิดการควบคุมแบบไร้เซ็นเซอร์
การระบุอัตโนมัติ (ID) อาศัยแบบจำลองทางคณิตศาสตร์ที่แม่นยำของมอเตอร์เพื่อระบุพารามิเตอร์ของมอเตอร์โดยอัตโนมัติ
คำนวณแรงบิดจริง ฟลักซ์แม่เหล็กของสเตเตอร์ และความเร็วของโรเตอร์แบบเรียลไทม์โดยอิงจากค่าจริงที่สอดคล้องกับอิมพีแดนซ์ของสเตเตอร์ ความเหนี่ยวนำร่วม ปัจจัยความอิ่มตัวของแม่เหล็ก ความเฉื่อย ฯลฯ
ตระหนักถึงการควบคุมแบนด์-แบนด์โดยสร้างสัญญาณ PWM ตามฟลักซ์แม่เหล็กและแรงบิดสำหรับควบคุมสถานะสวิตช์ของอินเวอร์เตอร์

ตัวแปลงความถี่ไฟฟ้ากระแสสลับชนิดเมทริกซ์มีการตอบสนองแรงบิดที่รวดเร็ว (<2ms) ความแม่นยำความเร็วสูง (± 2% ไม่มีการตอบสนอง PG) ความแม่นยำของแรงบิดสูง (<+3%); ในขณะเดียวกันก็ยังมีแรงบิดเริ่มต้นที่สูงกว่าและความแม่นยำของแรงบิดสูง โดยเฉพาะอย่างยิ่งที่ความเร็วต่ำ (รวมถึงความเร็ว 0) ซึ่งสามารถส่งออกแรงบิดที่กำหนดได้ 150%~200%
ตัวแปลงความถี่ควบคุมมอเตอร์อย่างไร? พวกเขาเชื่อมต่อกันอย่างไร?
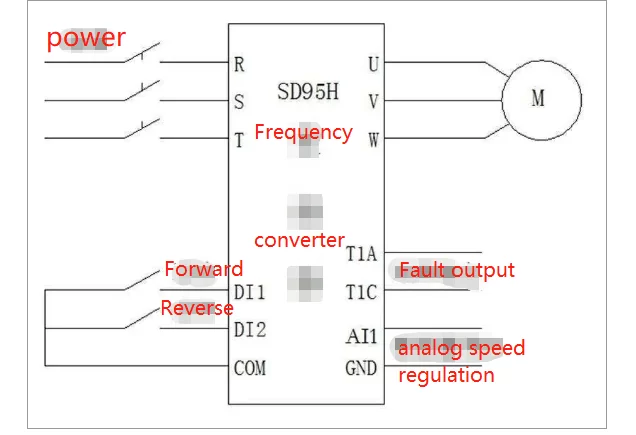
การเดินสายตัวแปลงความถี่เพื่อควบคุมมอเตอร์นั้นค่อนข้างง่าย คล้ายกับการเดินสายคอนแทคเตอร์ เชื่อมต่อสายไฟหลักสามเส้นแล้วส่งออกไปยังมอเตอร์ อย่างไรก็ตาม มีวิธีการควบคุมตัวแปลงความถี่หลายวิธี
ประการแรก มาดูการเชื่อมต่อขั้วต่อของตัวแปลงความถี่กันก่อน แม้ว่าจะมีหลายยี่ห้อและวิธีการเดินสายที่แตกต่างกันสำหรับตัวแปลงความถี่ แต่ส่วนใหญ่มีการเชื่อมต่อขั้วต่อที่คล้ายกัน โดยทั่วไปจะมีอินพุตสวิตช์สำหรับการหมุนไปข้างหน้าและย้อนกลับที่ใช้ควบคุมการสตาร์ทและการถอยหลังของมอเตอร์ เทอร์มินัลป้อนกลับที่ใช้เพื่อให้ป้อนกลับสถานะการทำงาน เช่น ความถี่ในการทำงาน ความเร็ว สถานะข้อบกพร่อง ฯลฯ การควบคุมการตั้งค่าความเร็วซึ่งสามารถปรับได้โดยใช้โพเทนชิโอมิเตอร์หรือปุ่ม ขึ้นอยู่กับตัวแปลงประเภทต่างๆ
การควบคุมสามารถทำได้โดยการเดินสายทางกายภาพหรือเครือข่ายการสื่อสาร ขณะนี้ไดรฟ์ความถี่ตัวแปรหลายตัวรองรับการควบคุมการสื่อสาร ทำให้มอเตอร์สตาร์ท/หยุด การหมุนไปข้างหน้า/ถอยหลัง การปรับความเร็ว และข้อมูลป้อนกลับสามารถส่งผ่านสายสื่อสารได้
เมื่อความเร็วการหมุน (ความถี่) ของมอเตอร์เปลี่ยนแปลง จะเกิดอะไรขึ้นกับแรงบิดเอาท์พุต?
แรงบิดเริ่มต้นและแรงบิดสูงสุดเมื่อขับเคลื่อนด้วยตัวแปลงความถี่ควรน้อยกว่าเมื่อขับเคลื่อนด้วยแหล่งจ่ายไฟหลักโดยตรง
เมื่อมอเตอร์ได้รับพลังงานจากแหล่งจ่ายไฟหลัก จะเกิดการกระแทกและการเร่งความเร็วอย่างมาก อย่างไรก็ตาม เมื่อได้รับพลังงานจากตัวแปลงความถี่ ผลกระทบเหล่านี้จะน้อยลง การสตาร์ทโดยตรงที่ความถี่หลักจะทำให้เกิดกระแสสตาร์ทขนาดใหญ่ เมื่อใช้ตัวแปลงความถี่ แรงดันเอาต์พุตและความถี่ของตัวแปลงจะค่อยๆ เพิ่มเข้าไปในมอเตอร์ ดังนั้นกระแสสตาร์ทและผลกระทบต่อมอเตอร์จึงน้อยลง

โดยปกติ เมื่อความถี่ลดลง (ความเร็วลดลง) แรงบิดที่เกิดจากมอเตอร์ก็จะลดลงเช่นกัน ข้อมูลจริงสำหรับการลดลงนี้สามารถพบได้ในคู่มือบางฉบับสำหรับตัวแปลงความถี่
ด้วยการใช้วิธีการควบคุมเวกเตอร์กับอินเวอร์เตอร์ควบคุมฟลักซ์แม่เหล็ก จะสามารถปรับปรุงแรงบิดความเร็วต่ำที่ไม่เพียงพอของมอเตอร์ เพื่อให้สามารถส่งแรงบิดที่เพียงพอออกมาได้แม้ที่ความเร็วต่ำ
เมื่อปรับเป็นความถี่ที่มากกว่า 50Hz ด้วยไดรฟ์ความถี่แปรผัน (VFD) แรงบิดเอาท์พุตของมอเตอร์จะลดลง
มอเตอร์ทั่วไปได้รับการออกแบบและผลิตตามมาตรฐานแรงดันไฟฟ้า 50Hz; แรงบิดพิกัดยังได้รับภายในช่วงแรงดันไฟฟ้านี้ด้วย ดังนั้น การควบคุมความเร็วที่ต่ำกว่าความถี่ที่กำหนดจึงเรียกว่าการควบคุมความเร็วของแรงบิดคงที่ (T=Te,P<=เป)
เนื่องจากความถี่เอาต์พุต VFD เกิน 50Hz ความสัมพันธ์เชิงเส้นระหว่างแรงบิดที่ผลิตได้จากมอเตอร์จะลดลงตามสัดส่วนเมื่อความถี่เพิ่มขึ้น
เมื่อทำงานที่ความเร็วสูงกว่า 50Hz ต้องพิจารณาเพื่อป้องกันแรงบิดเอาท์พุตที่ไม่เพียงพอไม่ให้เกิดขึ้นเนื่องจากขนาดโหลดของมอเตอร์ไฟฟ้า
ตัวอย่างเช่น แรงบิดที่ผลิตได้ของมอเตอร์ไฟฟ้าที่ทำงานที่ 100 Hz จะลดลงประมาณครึ่งหนึ่งเมื่อเทียบกับแรงบิดที่ผลิตได้ขณะทำงานที่ 50 Hz
ดังนั้น การควบคุมความเร็วที่สูงกว่าความถี่ที่กำหนดจึงเรียกว่าการควบคุมความเร็วของกำลังคงที่ (P=Ue*Ie)
การใช้ตัวแปลงความถี่ที่สูงกว่า 50Hz
ดังที่เราทราบ สำหรับมอเตอร์เฉพาะ แรงดันไฟฟ้าและกระแสไฟฟ้าที่กำหนดจะคงที่
หากค่าพิกัดของทั้งตัวแปลงความถี่และมอเตอร์คือ 15kW/380V/30A มอเตอร์จะทำงานที่ความถี่ที่สูงกว่า 50Hz
เมื่อความเร็วเป็น 50Hz แรงดันเอาต์พุตของตัวแปลงความถี่จะเป็น 380V และกระแสคือ 30A หากเราเพิ่มความถี่เอาต์พุตเป็น 60Hz แรงดันเอาต์พุตและกระแสสูงสุดของตัวแปลงความถี่จะยังคงอยู่ที่ 380V/30A เท่านั้น เห็นได้ชัดว่า เนื่องจากกำลังเอาต์พุตยังคงไม่เปลี่ยนแปลง สิ่งนี้เรียกว่าการควบคุมความเร็วของกำลังคงที่

แล้วแรงบิดในกรณีนี้ล่ะ?
เนื่องจาก P=wT (P: กำลัง; w: ความเร็วเชิงมุม; T: แรงบิด) หาก P ยังคงคงที่ แต่ w เพิ่มขึ้น T จะลดลงตามไปด้วย
เรายังมองจากอีกมุมมองหนึ่งได้:
แรงดันไฟฟ้าสเตเตอร์ U=E+I*R (I: กระแส; R: ความต้านทานไฟฟ้า; E: แรงเคลื่อนไฟฟ้าเหนี่ยวนำ) ของมอเตอร์
จะเห็นได้ว่าเมื่อ U และฉันยังคงไม่เปลี่ยนแปลง E ก็ไม่เปลี่ยนแปลงเช่นกัน
และ E=kฉX (k: ค่าคงที่; f: ความถี่; X: ฟลักซ์แม่เหล็ก) ดังนั้นเมื่อ f เปลี่ยนจาก 50-->60Hz,X ลดลงตามลำดับ
สำหรับมอเตอร์ T=KฉันX(K:คงที่,I:กระแส,X:ฟลักซ์แม่เหล็ก) ดังนั้นเมื่อฟลักซ์แม่เหล็ก X ลดลง T จะลดลงตามไปด้วย

At less than or equal to 50 Hz,I*R is small so when U/f=E/f does not change,magnetic flux(X)is constant.Torque(T)and electric current(I)are proportional.This explains why overload(torque)capacity of a variable-frequency drive(VFD)is usually described by its overcurrent capacity,and referred to as "constant-torque"speed regulation(rated current remains unchanged-->แรงบิดสูงสุดยังคงไม่เปลี่ยนแปลง)
บทสรุป: เมื่อความถี่เอาท์พุตของตัวแปลงความถี่เพิ่มขึ้นจากที่สูงกว่า 50Hz แรงบิดเอาท์พุตของมอเตอร์จะลดลง
ปัจจัยอื่นๆ ที่เกี่ยวข้องกับแรงบิดเอาท์พุต
ความสามารถในการทำความร้อนและความเย็นจะกำหนดความสามารถกระแสเอาต์พุตของอินเวอร์เตอร์ ซึ่งส่งผลต่อความสามารถแรงบิดเอาท์พุตของอินเวอร์เตอร์
ความถี่พาหะ: กระแสไฟพิกัดที่ระบุโดยอินเวอร์เตอร์ทั่วไปจะขึ้นอยู่กับค่าที่สามารถส่งออกได้อย่างต่อเนื่องที่ความถี่พาหะสูงสุดและอุณหภูมิแวดล้อมสูงสุด การลดความถี่พาหะจะไม่ส่งผลต่อกระแสของมอเตอร์ อย่างไรก็ตาม ความร้อนของส่วนประกอบจะลดลง
อุณหภูมิแวดล้อม: เช่นเดียวกับการเพิ่มค่ากระแสการป้องกันของอินเวอร์เตอร์เมื่อตรวจจับอุณหภูมิโดยรอบต่ำก็ไม่จำเป็น
ระดับความสูง: การเพิ่มระดับความสูงส่งผลต่อการกระจายความร้อนและประสิทธิภาพของฉนวน โดยทั่วไปสามารถละเว้นได้ที่ระดับต่ำกว่า 1,000 ม. และการลดความจุไฟฟ้า 5% ต่อ 1,000 เมตรเหนือระดับนี้ก็เพียงพอแล้ว

จะปรับความถี่ของมอเตอร์ที่ควบคุมโดยไดรฟ์ความถี่แปรผันได้อย่างไร?
จากบทสรุปข้างต้น เราได้เรียนรู้ว่าเหตุใดจึงจำเป็นต้องใช้ไดรฟ์ความถี่ตัวแปรเพื่อควบคุมมอเตอร์และวิธีการทำงาน การควบคุมมอเตอร์ด้วยไดรฟ์ความถี่แปรผันสามารถสรุปได้เป็นสองจุด: ประการแรก การควบคุมแรงดันไฟฟ้าสตาร์ทและความถี่ของมอเตอร์ด้วยไดรฟ์ความถี่แปรผันเพื่อให้การสตาร์ทและหยุดเป็นไปอย่างราบรื่น ประการที่สอง การปรับความเร็วของมอเตอร์โดยการเปลี่ยนความถี่โดยใช้ไดรฟ์ความถี่แบบแปรผัน
มีคำถามเชิงปฏิบัติจากชาวเน็ต: ความถี่ต่ำสุดที่สามารถปรับเมื่อควบคุมมอเตอร์ธรรมดาด้วยไดรฟ์ความถี่ตัวแปรคืออะไร? ปัจจุบันปรับเป็น 60Hz แล้ว และหัวหน้าก็ขอให้เพิ่มเลข Hz ต่อไป แผนคือปรับเป็น 100Hz มีใครเคยปรับเป็น 100Hz บ้างไหมครับ? (ในสถานการณ์ที่คล้ายคลึงกัน ปัจจัยใดบ้างที่ต้องพิจารณา)

มาดูกันว่าชาวเน็ตจะตอบรับอย่างไร:
ชาวเน็ต lpl53: เรามีเครื่องซักผ้าอุตสาหกรรมถึง 200HZ แล้ว แต่กระแสไฟไม่สูง
Netizen26584: โดยทั่วไปมอเตอร์ของเครื่องบดจะอยู่ระหว่าง 100-110…
ชาวเน็ต 82252031: ถ้ามีไฟเพียงพอและไม่มีกระแสไฟฟ้าในมอเตอร์มากเกินไปก็สามารถทำงานได้ อย่างไรก็ตาม ควรให้ความสำคัญกับการวัดอุณหภูมิของแบริ่งมอเตอร์ เสียงที่ผิดปกติ และการสั่นสะเทือน มอเตอร์ขับเคลื่อนด้วยความถี่ตัวแปรหนึ่งตัวทำงานที่ 70-80Hz เป็นเวลานาน มอเตอร์หกขั้วนั้นง่ายต่อการลองใช้ ในขณะที่มอเตอร์สองขั้วต้องใช้ความระมัดระวัง
ชาวเน็ต fsjnzhouyan: ขึ้นอยู่กับคุณภาพของแผ่นเหล็กซิลิกอนที่ใช้ในมอเตอร์ ในกรณีการใช้งานก่อนหน้านี้ มักจะไม่มีปัญหาจนถึงประมาณ 85Hz; อย่างไรก็ตาม มอเตอร์หลายตัวไม่สามารถเข้าถึงความเร็วที่กำหนดได้หลังจากปรับจนถึงประมาณ 90Hz เนื่องจากความอิ่มตัวของแม่เหล็ก
ชาวเน็ต ZCMY: จะดีที่สุดถ้าคุณเปลี่ยนตลับลูกปืนมอเตอร์เป็นตลับลูกปืนความเร็วสูง ทดสอบการสั่นสะเทือนและตรวจสอบให้แน่ใจว่าเหมาะสำหรับโหลด เช่น พัดลมหรือปั๊มน้ำ
ชาวเน็ต mengx9806: ครั้งหนึ่งฉันเคยปรับมันจนถึง 1210HZ โดยใช้ไดรฟ์ความถี่ตัวแปร A1000 ซีรีส์เครื่องจักรไฟฟ้าของ Dongyuan ซึ่งทำงานได้โดยไม่มีปัญหาใดๆ เป็นเวลาสองปีติดต่อกันโดยไม่มีปัญหาใหญ่เกิดขึ้น แม้ว่าปัญหาเล็กๆ น้อยๆ อาจเกิดขึ้นหากมีข้อผิดพลาดเกิดขึ้นก็ตาม
ชาวเน็ต 68957:ฉันพยายามปรับจนถึง 180 แต่มันก็วิ่งได้เพียงช่วงสั้นๆ เท่านั้น
ชาวเน็ต 1531214350: เคยซ่อมเครื่องซักผ้ามาก่อนแล้วมอเตอร์ก็ธรรมดา มันวิ่งที่ 150HZ ระหว่างการปั่นแห้ง
Ya de Ya: หากความถี่ของมอเตอร์ธรรมดาสูงกว่าความถี่ที่กำหนด 20% ความแตกต่างของความเร็วจะเพิ่มขึ้น เมื่อความถี่เพิ่มขึ้น ความแตกต่างของความเร็วก็จะเพิ่มขึ้นเช่นกัน

ชาวเน็ต kdrjl: ดูเหมือนว่ายังมีความเข้าใจน้อยเกินไปเกี่ยวกับโครงสร้างพื้นฐานและการใช้มอเตอร์เหนี่ยวนำกระแสสลับ ขีดจำกัดความเร็วสูงสุดสำหรับการควบคุมมอเตอร์เหนี่ยวนำไม่ได้อยู่ที่ไดรฟ์ความถี่แปรผัน โดยทั่วไปแล้ว ไดรฟ์ความถี่แปรผันปกติจะทำงานที่ความถี่ไม่ต่ำกว่า 400Hz ในโหมด V/F (เช่น ไดรฟ์ความถี่แปรผันของ Siemens ทำงานที่ 600Hz) สำหรับการควบคุมเวกเตอร์ ขีดจำกัดความถี่การทำงานสูงสุดคือ 200-300Hz ในขณะที่การควบคุมเซอร์โวยังมีขีดจำกัดที่สูงกว่าอีกด้วย ดังนั้น หากคุณต้องการควบคุมความเร็วของมอเตอร์เหนี่ยวนำของคุณให้สูงถึง 100Hz โดยใช้ไดรฟ์ความถี่ตัวแปร ก็ไม่มีอุปสรรคทางเทคนิคหรือข้อสงสัยเกี่ยวกับเรื่องนี้
โครงสร้างทางกลของโรเตอร์มอเตอร์เหนี่ยวนำ เช่น โครงสร้างกรง จะกำหนดความแข็งแรงทางกลซึ่งสัมพันธ์กับความเร็วการหมุนสูงสุดของการออกแบบ ยิ่งหมุนเร็วเท่าไร แรงเหวี่ยงก็จะยิ่งมากขึ้นเท่านั้น ดังนั้น โดยทั่วไปแล้วจะเป็นไปตามข้อกำหนดการออกแบบโดยพิจารณาจากความเร็วในการหมุนสูงสุด และความแข็งแรงทางกลต้องไม่มากจนเกินไป แบริ่งโรเตอร์ยังมีขีดจำกัดการหมุนสูงสุด ดังนั้นเมื่อทำงานเกินค่าเหล่านี้ คุณต้องเข้าใจว่าขีดจำกัดเหล่านี้คืออะไร และแทนที่ด้วยแบริ่งความเร็วสูงหากจำเป็น
สุดท้าย การแก้ไขจุดบกพร่องแบบไดนามิกและการตั้งค่าโรเตอร์ไม่ควรเกินพารามิเตอร์ที่ผู้ผลิตกำหนด
โดยสรุป เมื่อควบคุมความเร็วของมอเตอร์เหนี่ยวนำผ่านแอปพลิเคชันไดรฟ์ความถี่แปรผันที่เกิน 100 เฮิรตซ์ สิ่งสำคัญคือต้องปรึกษากับผู้ผลิตก่อนว่าสามารถทำได้หรือขอมอเตอร์แบบปรับแต่งแทน เพื่อให้มั่นใจในความน่าเชื่อถือภายใต้สภาวะความเร็วสูง หากคุณ ตัดสินใจว่าจะไม่ผ่านผู้ผลิต คุณต้องพิจารณาการทดสอบสมดุลแบบไดนามิกของโรเตอร์ก่อน จากนั้นจึงยืนยันความเร็วการหมุนสูงสุดของตลับลูกปืน

หากเกินค่านี้ คุณจะต้องเปลี่ยนตลับลูกปืนความเร็วสูงที่สามารถตอบสนองข้อกำหนดหน้างานได้ คุณต้องพิจารณาปัญหาการกระจายความร้อนด้วย
สุดท้ายนี้ จากประสบการณ์ มอเตอร์เหนี่ยวนำที่มีกำลังต่ำกว่า 100kW ควรค่อนข้างเหมาะสมกับการทำงานที่ความถี่ภายใน 100Hz; อย่างไรก็ตาม ส่วนที่เกิน 100kW นั้นได้รับการปรับแต่งอย่างดีที่สุด แทนที่จะเลือกผลิตภัณฑ์ที่ใช้งานทั่วไปทั่วไป
ชาวเน็ต lvpretend: ขึ้นอยู่กับตัวมอเตอร์เป็นหลัก หากเดิมเป็นมอเตอร์แบบสองขั้วที่มีกำลังสูงจะต้องระมัดระวัง เครื่องซักผ้าอุตสาหกรรมเป็นตัวอย่างของการทำงานด้วยความเร็วเกินบ่อยครั้ง แต่ความเร็วที่กำหนดโดยทั่วไปจะต่ำ ซึ่งส่วนใหญ่เป็นมอเตอร์แบบ 6 ขั้ว ฉันเคยเห็นมอเตอร์แบบ 4 ขั้วที่มีความถี่สูงถึง 120 เฮิร์ตซ์
ข้อมูลเพิ่มเติมกรุณาติดต่อกับ ผู้ผลิตมอเตอร์ไฟฟ้ามืออาชีพ - ตงชุนมอเตอร์ประเทศจีนโดยตรง






