 Hoppa till innehållet
Hoppa till innehållet 
Nästan hälften av världens strömförbrukning förbrukas av elmotorer, så elmotorernas höga verkningsgrad sägs vara den mest effektiva åtgärden för att lösa världens energiproblem.
Typer av elektriska motorer
I allmänhet hänvisar det till omvandlingen av kraften som genereras av strömflödet i ett magnetfält till en roterande verkan, och inom ett brett område inkluderar det också linjär verkan.
Beroende på vilken typ av strömförsörjning som används för att driva motorn finns det DC-motorer och AC elmotorer.
Och enligt motorrotationsprincipen kan den grovt delas in i följande kategorier. (Förutom specialmotorer)
DC elmotor /DC (likström) motorer
Borstade motorer
De allmänt använda borstmotorerna kallas i allmänhet DC-elektriska motorer.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Borstlös DC-motor
Borstlösa likströmsmotorer använder inte borstar eller kommutatorer, utan använder en omkopplingsfunktion som en transistor för att koppla om strömmen och utföra rotationsåtgärder.
Stegmotor.
Denna motor arbetar synkront med pulseffekt, och kallas därför även för en pulsinduktionsmotor.
Den kännetecknas av förmågan att enkelt uppnå exakt positioneringsoperation.
AC-motorer
Asynkron motor
Växelström genererar ett roterande magnetfält i statorn, vilket i sin tur genererar en inducerad ström i rotorn, i vars samverkan rotation sker för växelströmsinduktionsmotorn.
Synkronmotor
Växelström skapar ett roterande magnetfält, och rotorn med magnetiska poler roterar på grund av attraktionen.
-Vridhastigheten är lyckligtvis synkroniserad med frekvensen på strömförsörjningen.
Om strömmar, magnetfält och krafter
Låt oss först, för efterföljande motorprincipförklaringar, se över de grundläggande lagarna/lagarna angående ström, magnetfält och kraft.
Även om det finns en känsla av nostalgi, är det lätt att glömma denna kunskap om du inte brukar använda magnetiska komponenter
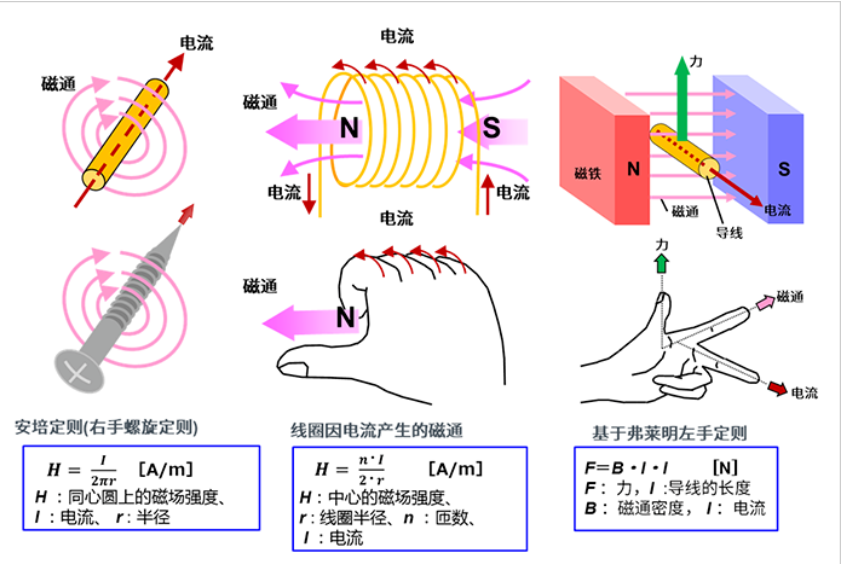
Vi kombinerar bilder och formler för att illustrera.
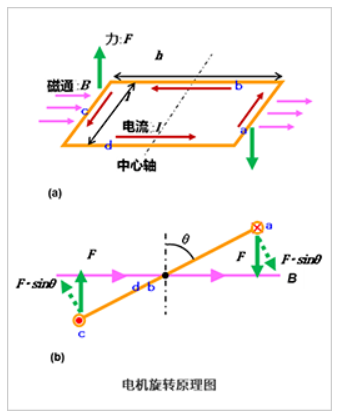
När trådramen är rektangulär tas hänsyn till kraften som verkar på strömmen.
Kraften F som verkar på delarna av sidorna a och c är
Vridmomentet genereras med den centrala axeln som centrumaxeln.
Till exempel, när man betraktar ett tillstånd där rotationsvinkeln endast är θ, är kraften som verkar i rät vinkel mot b och d sinθ, så vridmomentet Ta för a-delen ges av:
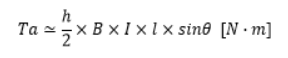
Med tanke på del c på samma sätt, dubbleras vridmomentet och genererar vridmomentet beräknat med följande ekvation

Eftersom arean av rektangeln är S = h・l, ger en ersättning av den i ekvationen ovan följande resultat.

Formeln gäller inte bara för rektanglar, utan även för andra vanliga former som cirklar. Motorn använder sig av denna princip.
Hur roterar en elmotor?
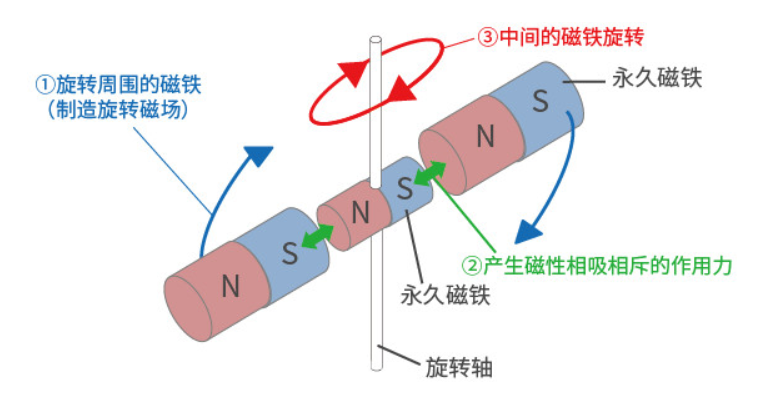
1) Induktionsmotorerna roterar med hjälp av magneter och magnetisk kraft
Runt en permanentmagnet med en roterande axel,
① magneten roteras (så att ett roterande magnetfält genereras),
② sedan enligt principen att N- och S-poler attraherar varandra vid olika poler och stöter bort varandra på samma nivå,
③ magneten med en roterande axel kommer att rotera.
Detta är grundprincipen för växelströmsmotorers rotation.
Strömmen som flyter i ledaren orsakar ett roterande magnetfält (magnetisk kraft) runt den och därmed roterar magneten, vilket är praktiskt taget samma verkningsläge som detta.
Dessutom, när tråden lindas i en spoleform, syntetiseras den magnetiska kraften, vilket skapar ett stort magnetfältsflöde (flöde) som producerar N- och S-poler.
Dessutom, genom att föra in en järnkärna i den spolliknande tråden, blir de magnetiska kraftlinjerna lätta att passera och en starkare magnetisk kraft kan genereras.
2) Faktisk roterande motor
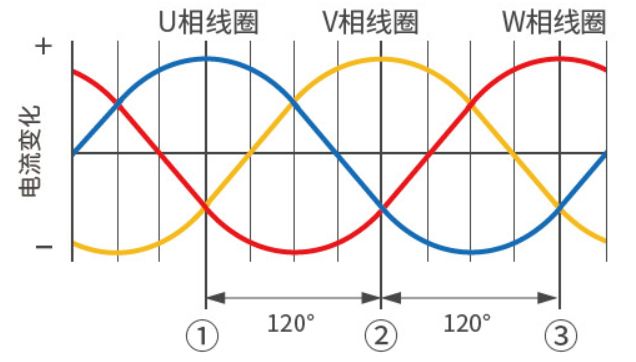
Här, som en praktisk metod för att rotera motorn, introducerar vi metoden att skapa ett roterande magnetfält med hjälp av trefas AC-motor och spolar.
(Tre-fas AC industrimotorer är en AC-signal placerad 120° från varandra i fas)
Det syntetiska magnetfältet i tillståndet ① ovan motsvarar figuren ① nedan.
Det syntetiska magnetfältet i tillståndet ② ovan motsvarar figuren ② nedan.
Det syntetiska magnetfältet i tillståndet ③ ovan motsvarar figuren ③ nedan.
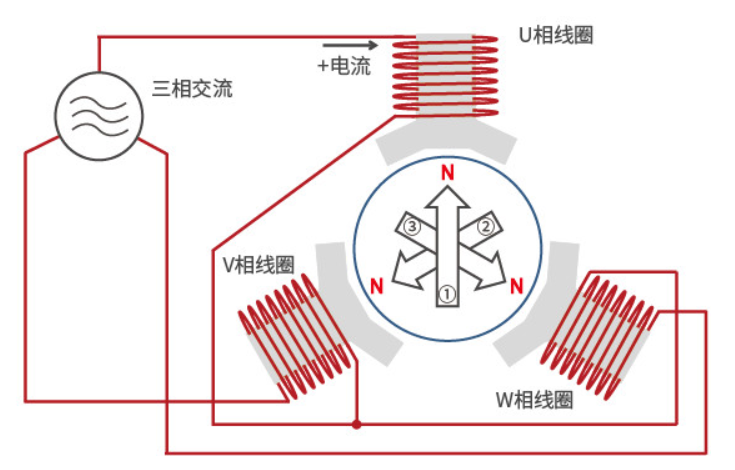
Som nämnts ovan är spolarna i den lindade kärnan indelade i tre faser, med 120° intervallkonfiguration av U-fasspolar, V-fasspolar och W-fasspolar, med spolen med högspänningsproducerande N-pol och spole med lågspänningsproducerande S-pol.

Varje fas ändras enligt en sinusvåg, så polariteten (N-polen, S-polen) och dess magnetiska fält (magnetiska kraft) som genereras av varje spole kommer att ändras.
Vid denna tidpunkt ändras spolen som producerar enbart N-polen i sekvens enligt U-fasspolen → V-fasspole → W-fasspole → U-fasspole, och således sker rotation.

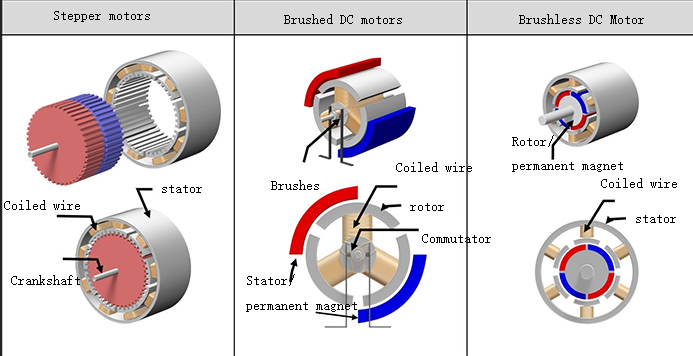
Struktur av en liten motor
Följande figur ger den ungefärliga strukturen och jämförelsen av tre typer av industrimotorer: stegmotorer, borstade DC-motorer (DC) och borstlösa DC-motorer (DC).
Grundkomponenterna i dessa motorer är främst spolar, magneter och rotorer, och det finns även spolfixerade och magnetfixerade typer beroende på typ.
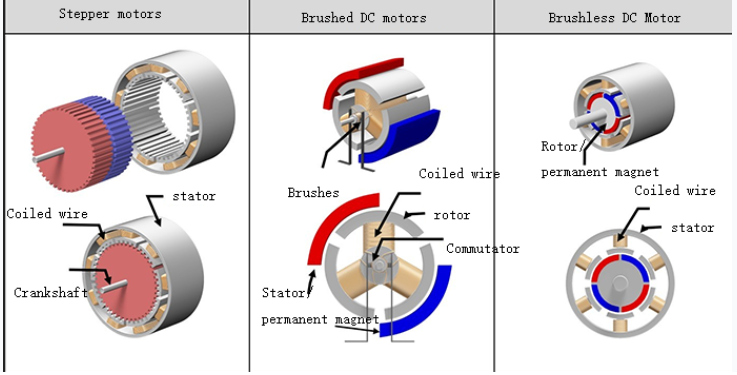
Följande är en beskrivning av strukturen förknippad med exempeldiagrammet. Eftersom det kan finnas andra strukturer om de delas upp mer noggrant, vänligen förstå att strukturen som presenteras i detta dokument är under en stor ram.
Stegmotorns spole är här fixerad på utsidan och magneten roteras på insidan.
Här är magneten på den borstade DC-motorn fixerad på utsidan och spolen roterar på insidan. T
borstarna och kommutatorn är ansvariga för att förse spolen med ström och ändra strömriktningen.
Vid en borstlös motor är spolen fixerad på utsidan och magneten roterar på insidan.
Strukturen på en borstlös motor är annorlunda även om grundkomponenterna är desamma på grund av de olika typerna av motorer. Detaljerna kommer att förklaras i varje avsnitt.
Borstmotor
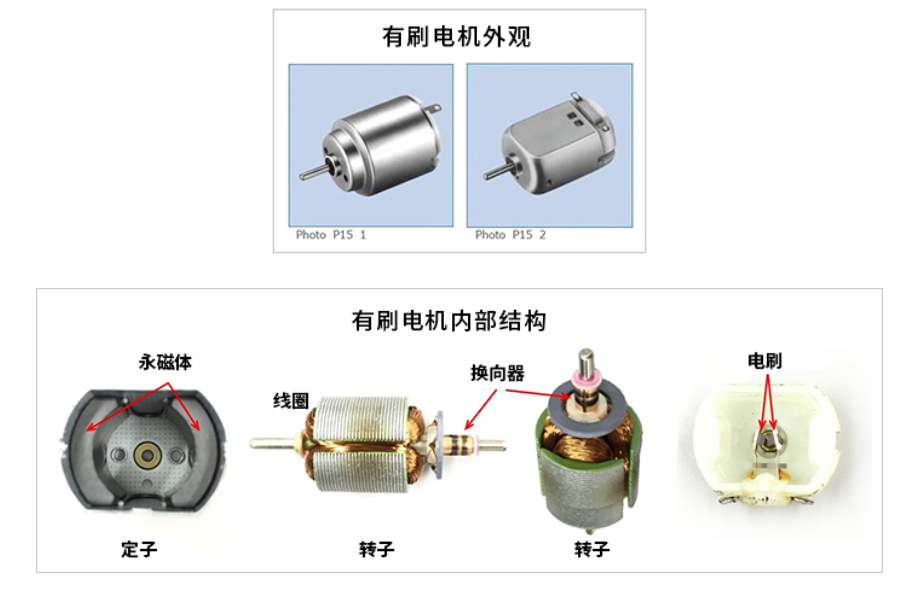
Struktur för borstade DC-motorer
Nedan visas utseendet på en borstad likströmsmotor som ofta används i modeller, och ett schematiskt diagram över nedbrytningen av en normal tvåpolig (2 magneter) treslits (3 spolar) motortyp. Kanske många av er har erfarenhet av att ta isär likströmsmotorn och ta ut magneterna.
Du kan se att permanentmagneterna på en borstad DC-motor är fixerade och spolarna på en borstad DC-motor kan rotera runt det inre mitten.
The fixed side is called the "stator" and the rotating side is called the "rotor".
Följande är en strukturell skiss som representerar begreppet struktur.
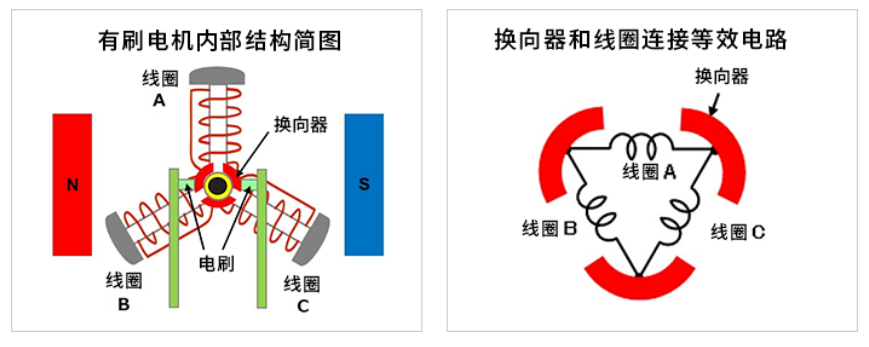
Den roterande centralaxelns periferi har tre kommutatorer (böjda metallplåtar för strömomkoppling).
För att undvika kontakt med varandra är kommutatorerna konfigurerade 120° isär (360° ÷ 3 stycken). Kommutatorerna roterar med axelns rotation.
En kommutator är ansluten till den ena spoländen och den andra spoländen, och de tre kommutatorerna och de tre spolarna bildar en helhet (ring) som ett kretsnät.
Två borstar är fixerade vid 0° och 180° för att få kontakt med kommutatorn.
En extern likströmskälla är ansluten till borstarna och strömmen flyter i vägborsten → kommutator → spole → borste.
Rotationsprincipen för borstens likströmsmotor
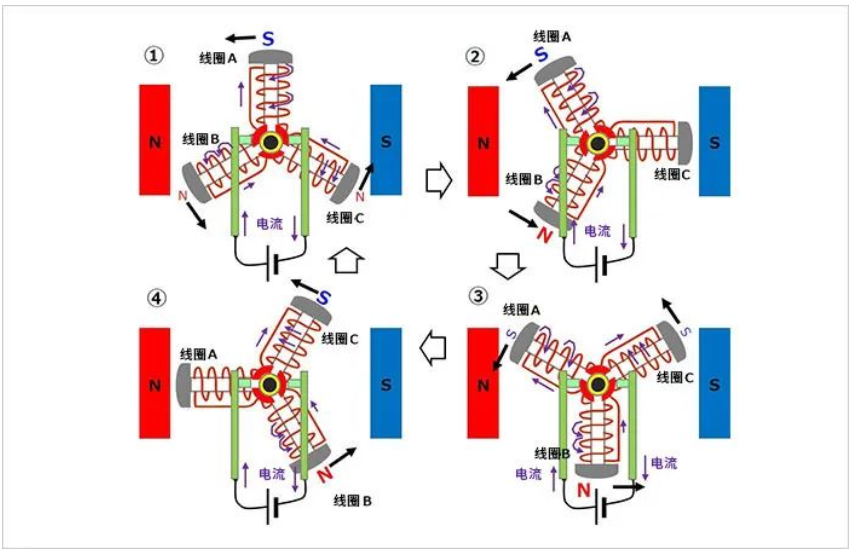
① Rotera moturs från utgångsläget
Spole A är överst och ansluter elverktygsmatningen till borstarna, ställ in vänster sida som (+) och höger sida som (-).
En stor ström flyter från den vänstra borsten genom kommutatorn till spolen A.
Detta är strukturen där den övre delen (utsidan) av spole A blir S-polen.
Och eftersom 1/2 av strömmen från spole A flyter från den vänstra borsten till spolarna B och C i motsatt riktning mot spole A, blir yttersidorna av spolarna B och C svaga N-poler (indikeras med något mindre bokstäver i figur).
De magnetiska fälten som genereras i dessa spolar och magneternas repulsiva och attraktiva effekter gör att spolarna utsätts för en moturs roterande kraft.
② Ytterligare moturs rotation
Antag sedan att den högra borsten är i kontakt med båda kommutatorerna i ett tillstånd där spole A roteras 30° moturs.
Strömmen för spole A flyter kontinuerligt från den vänstra borsten genom den högra borsten och spolens utsida förblir S-pol.
Samma ström som spole A flyter genom spole B, och utsidan av spole B blir starkare N-pol.
Eftersom ändarna på spolen C kortsluts av borstarna, flyter ingen ström och inget magnetfält genereras.
Även i detta fall finns det en moturs rotationskraft.
Spolen på ovansidan från ③ till ④ utsätts kontinuerligt för en kraft som rör sig till vänster, och den nedre spolen utsätts kontinuerligt för en kraft som rör sig till höger och fortsätter att rotera moturs
När spolen roterar var 30° till ③ och ④, blir den yttre sidan av spolen S-polen när spolen är ovanför den centrala horisontella axeln; när spolen är under, blir den N-polen, och rörelsen upprepas.
Med andra ord utsätts den övre spolen upprepade gånger för en kraft som rör sig åt vänster och den nedre spolen utsätts upprepade gånger för en kraft som rör sig åt höger (båda moturs). Detta får rotorn att rotera moturs hela tiden.
Om ström ansluts till den motsatta vänstra borsten (-) och den högra borsten (+), genereras ett magnetfält i spolarnas statorlindningar i motsatt riktning, så kraften som appliceras på spolarna rör sig i motsatt riktning och roterar medurs .
Dessutom, när strömmen är bortkopplad, slutar rotorn på den borstade motorn att snurra eftersom den berövas magnetfältet som håller den igång.
Trefas fullvågs borstlös motor
Utseende och struktur hos en trefas fullvågs borstlös motor
Följande bild visar ett exempel på utseendet och strukturen hos en borstlös motor.
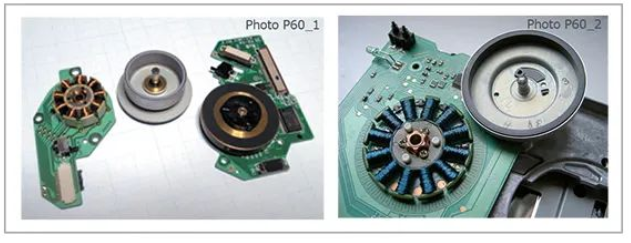
Till vänster är ett exempel på en spindelmotor som används för att rotera en skiva i en skivuppspelningsenhet. Det finns 9 spolar med tre faser x 3. Till höger finns ett exempel på en spindelmotor för en FDD-enhet med 12 spolar (trefas x 4). Spolarna är fixerade på brädan och lindade på kärnan.
Den skivformade delen på höger sida av spolarna är permanentmagnetrotorn. Rotoraxeln förs in i mitten av spolen och täcker spoldelen, och permanentmagneterna omger spolens periferi.
Den inre strukturen hos den trefasiga fullvågsborstlösa motorn och motsvarande krets för spolanslutningen
Nästa är en skiss av den interna strukturen och motsvarande krets för spolanslutningen.
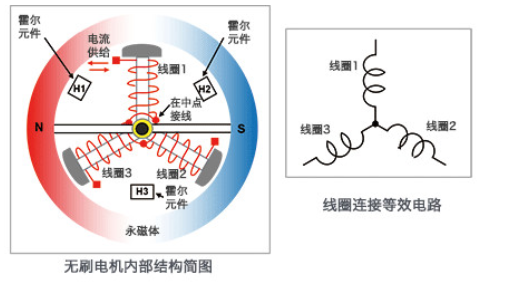
Denna interna strukturskiss är ett exempel på en 2-polig (2 magneter) 3-slits (3 spolar) motor med en mycket enkel struktur. Det liknar strukturen hos en borstad motor med samma antal poler och slitsar, men spolsidan är fixerad och magneterna kan roteras. Naturligtvis finns det inga borstar.
I detta fall är spolarna anslutna i en Y-form och ett halvledarelement används för att tillföra ström till spolarna, vilket styr in- och utflödet av ström enligt positionen för de roterande magneterna.
I det här exemplet används ett Hall-element för att detektera magnetens position. Hall-elementet är konfigurerat mellan spolen och spolen för att detektera spänningen som genereras och används som positionsinformation baserat på magnetfältets styrka. På bilden av FDD-spindelmotorn som gavs tidigare kan du också se Hall-elementet som används för att detektera positionen mellan spolen och spolen (ovanför spolen).
Hallelement är välkända som magnetiska sensorer.
Den kan omvandla magnetfältets storlek till spänningens storlek och indikera magnetfältets riktning i positiva eller negativa termer.
Nedan är ett diagram som visar Hall-effekten.
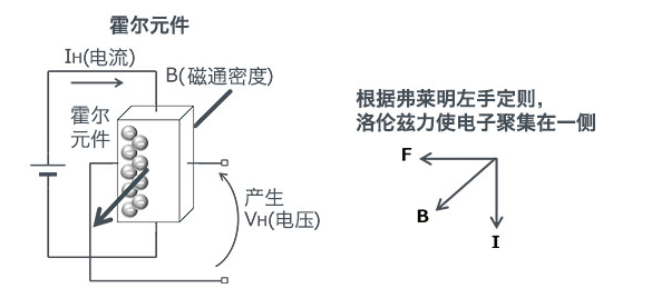
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
Den resulterande spänningen VH uttrycks med följande ekvation.
VH = (KH / d)・IH・B ※KH: Hallkoefficient, d: tjockleken på fluxpenetreringsytan
Som formeln visar, ju högre ström, desto högre spänning. Denna egenskap används ofta för att detektera rotorns (magneten) position.
Rotationsprincip för trefas fullvågs borstlös motor
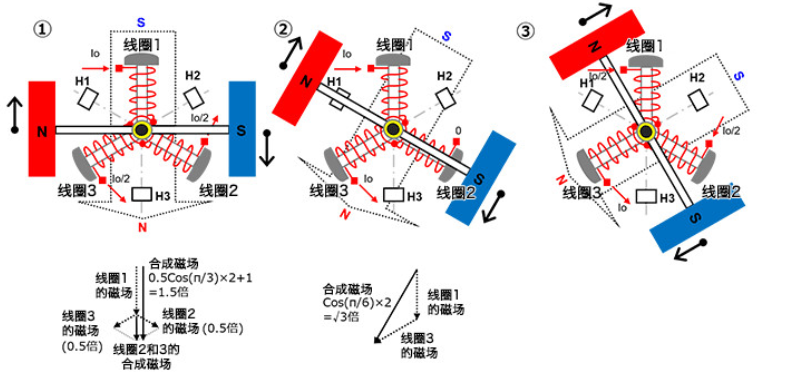
Rotationsprincipen för den borstlösa motorn kommer att förklaras i följande steg ① till ⑥. För enkel förståelse förenklas permanentmagneten från en cirkel till en rektangel här.
①
I en 3-fas spole, låt spole 1 fixeras vid klockan 12, spole 2 fixeras klockan 4 och spole 3 fixeras klockan 8 på klockan. Låt den 2-poliga permanentmagnetens N-pol vara på vänster sida och S-polen på höger sida och vridbar.
Få strömmen Io att flyta in i spole 1 för att producera det S-poliga magnetfältet på utsidan av spolen. Låt strömmen Io/2 flöda ut ur spole 2 och spole 3 för att skapa ett N-poligt magnetfält på utsidan av spolen.
När magnetfälten i spolarna 2 och 3 vektorsyntetiseras genereras det N-poliga magnetfältet nedåt, vilket är 0,5 gånger storleken på magnetfältet som genereras när strömmen Io passerar genom en spole, och blir 1,5 gånger storleken när läggs till magnetfältet hos spolen 1. Detta ger ett syntetiskt magnetfält i en vinkel på 90° i förhållande till permanentmagneten, så att det maximala vridmomentet kan genereras och permanentmagneten roterar medurs.
När strömmen i spole 2 minskas och strömmen i spole 3 ökas i enlighet med rotationspositionen, roterar det syntetiska magnetfältet också medurs och permanentmagneten fortsätter att rotera.
②
I det roterade tillståndet 30° flyter strömmen Io in i spole 1 så att strömmen i spole 2 är noll, vilket gör att strömmen Io rinner ut ur spole 3.
Den yttre sidan av spolen 1 blir S-polen och den yttre sidan av spolen 3 blir N-polen. När vektorn syntetiseras är det magnetiska fältet som produceras √3 (≈1,72) gånger det magnetiska fältet som produceras när strömmen Io passerar genom en spole. Detta producerar också ett syntetiserat magnetfält i en vinkel på 90° i förhållande till permanentmagnetens magnetfält och roterar medurs.
När inflödesströmmen Io för spole 1 minskas i enlighet med det roterande läget, ökas inflödesströmmen för spole 2 från noll, och utströmmen för spole 3 ökas till Io, roterar det syntetiska magnetfältet också medurs, och den permanenta magneten fortsätter att rotera.
Om vi antar att strömmen i varje fas är sinusformad är strömvärdet här Io × sin(π⁄3) = Io × √3⁄2. Genom vektorsyntes av magnetfältet är den totala magnetfältsstorleken (√3⁄2)2 × 2 = 1,5 gånger det magnetiska fältet som genereras av en spole. När strömmarna i varje fas är sinusformade är storleken på vektorsyntesens magnetfält 1,5 gånger det magnetfält som produceras av en spole oberoende av permanentmagnetens position, och magnetfältet har en vinkel på 90° med avseende på permanentmagnetens magnetfält.
③
I det tillstånd där rotationen har fortsatt i 30°, flyter strömmen Io/2 in i spole 1, strömmen Io/2 flyter in i spole 2 och strömmen Io flyter ut ur spole 3.
Den yttre sidan av spolen 1 blir S-polen, den yttre sidan av spolen 2 blir också S-polen, och den yttre sidan av spolen 3 blir N-polen. När vektorn syntetiseras är det magnetiska fältet som produceras 1,5 gånger det magnetiska fältet som produceras när strömmen Io flyter genom en spole (samma som ①). Även här alstras ett syntetiskt magnetfält i en vinkel på 90° i förhållande till permanentmagnetens magnetfält och roterar medurs.
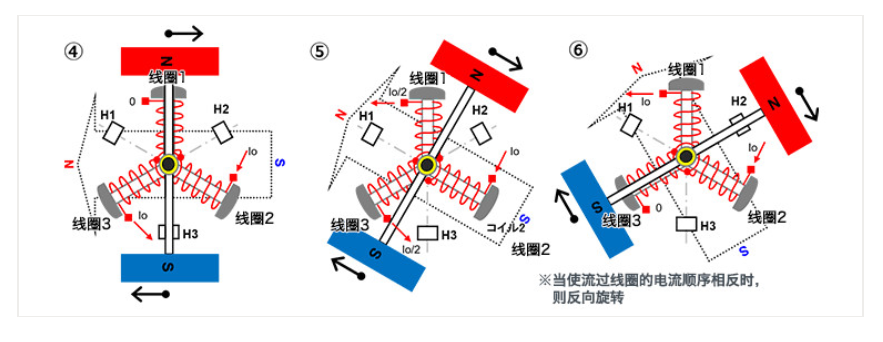
④~⑥
Vrid på samma sätt som ① till ③.
På detta sätt, om strömmen som flyter in i spolen kontinuerligt växlas sekventiellt i enlighet med permanentmagnetens position, kommer permanentmagneten att rotera i en fast riktning. På liknande sätt, om strömmen vänds och riktningen för det syntetiska magnetfältet vänds, kommer det att rotera moturs.
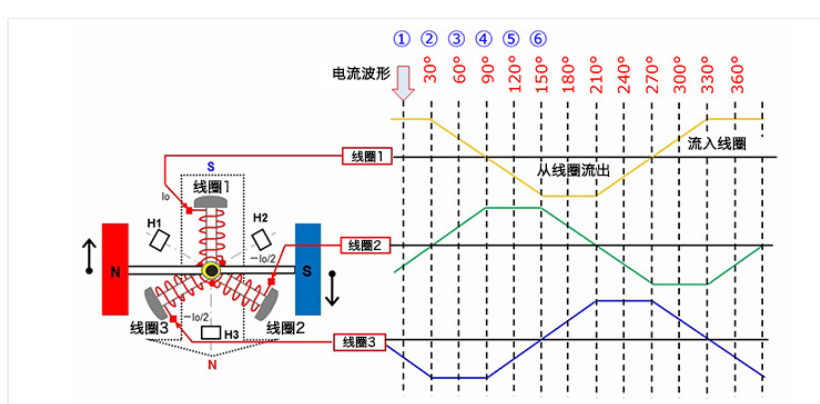
Följande diagram visar strömmarna i varje spole för vart och ett av stegen ① till ⑥ ovan i följd. Förhållandet mellan strömändring och rotation bör förstås av ovanstående beskrivning.
Stegmotorer
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
Stegmotorns struktur (tvåfas bipolär)
Följande diagram, från vänster till höger, visar ett exempel på utseendet på en stegmotor, en skiss av den interna strukturen och en skiss av strukturkonceptet.
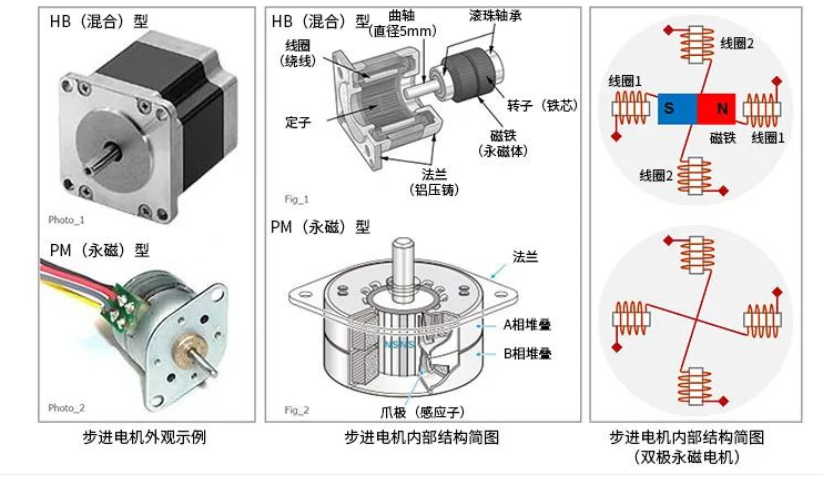
I exemplet med utseende anges utseendet på stegmotorer av typ HB (hybrid) och PM (permanent magnet). Strukturdiagrammet i mitten ges även för HB-typ och PM-typ.
Stegmotorn är en struktur där spolen är fixerad och permanentmagneten roterar. Det konceptuella diagrammet över den interna strukturen av en stegmotor till höger är ett exempel på en PM-motor som använder tvåfas (två uppsättningar) spolar. I exemplet med grundläggande stegmotorstruktur är spolarna konfigurerade på utsidan och permanentmagneterna konfigurerade på insidan. Förutom tvåfasspolar finns det även typer med ett större antal faser som trefas och femfas.
Vissa stegmotorer har andra olika strukturer, men den grundläggande strukturen för stegmotorn ges i detta dokument för att underlätta införandet av dess funktionsprincip. Genom detta dokument hoppas vi förstå den grundläggande strukturen hos stegmotorer med fasta spolar och roterande permanentmagneter.
Grundläggande arbetsprincip för stegmotor (enfas excitation)
Följande diagram används för att introducera den grundläggande driftprincipen för en stegmotor. Detta är ett exempel på excitation för varje fas (uppsättning spolar) av de tvåfasiga bipolära spolarna ovan. Utgångspunkten för diagrammet är att tillståndet ändras från ① till ④. Spolarna består av spole 1 respektive spole 2. Dessutom indikerar strömpilarna riktningen för strömflödet.
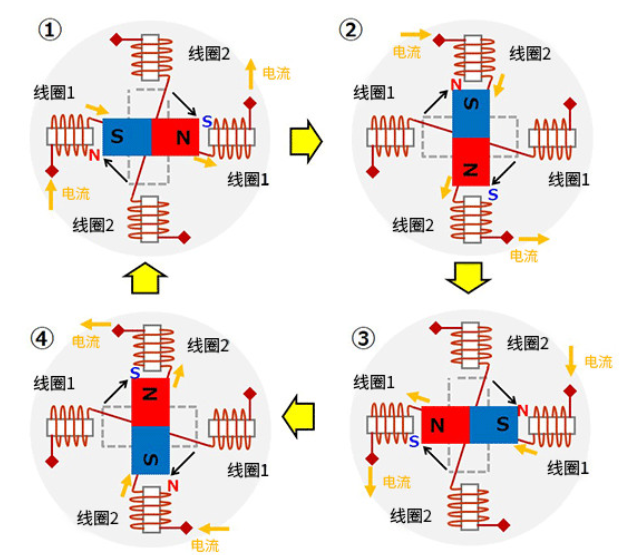
①
・ Få strömmen att flyta från den vänstra sidan av spole 1 och ut från den högra sidan av spole 1.
・ Låt inte ström flöda genom spole 2.
・ Vid denna tidpunkt blir den inre sidan av den vänstra spolen 1 N och den inre sidan av den högra spolen 1 blir S.
・Som ett resultat attraheras den mittersta permanentmagneten av magnetfältet i spole 1 och ändras till vänster sida S och höger sida N och stannar.
②
・Spolens 1 ström stoppas så att strömmen flyter in från ovansidan av spole 2 och ut från undersidan av spole 2.
・ Den inre sidan av övre spole 2 ändras till N och insidan av nedre spole 2 ändras till S.
・Permanentmagneten attraheras av sitt magnetfält och roterar 90° medurs för att stanna.
③
・Spolens 2 ström stoppas så att strömmen flyter in från höger sida av spole 1 och ut från vänster sida av spole 1.
・ Den inre sidan av den vänstra spolen 1 blir S och den inre sidan av den högra spolen 1 blir N.
・Permanentmagneten attraheras av sitt magnetfält och roterar medurs ytterligare 90° för att stanna.
④
・Stoppa strömmen i spole 1 så att strömmen flyter in från undersidan av spole 2 och ut från ovansidan av spole 2.
・Insidan av övre spole 2 blir S och insidan av nedre spole 2 blir N.
・Permanentmagneten attraheras av sitt magnetfält och roterar medurs ytterligare 90° för att stanna.
Stegmotorn kan roteras genom att växla strömmen som flyter genom spolen av den elektroniska kretsen i storleksordningen ① till ④ ovan. I det här exemplet får varje omkopplingsåtgärd stegmotorn att rotera 90°.
Dessutom, när strömmen kontinuerligt flyter genom en spole, kan stopptillståndet bibehållas och stegmotorn kan ha ett hållmoment. För övrigt, om ordningen för strömmen som flyter genom spolen är omvänd, kan stegmotorn fås att rotera baklänges.
Hitta en professionell industrimotortillverkare - Dongchun motor Kina







