 Hoppa till innehållet
Hoppa till innehållet 
Vi vet alla att frekvensomformaren är en teknik som bör bemästras inom elarbete, och att använda en frekvensomformare för att styra motorer är en vanlig metod inom elstyrning; vissa kräver också kompetens.
Idag kommer vi att sammanfatta och organisera relevant kunskap med vår begränsade kunskap. Innehållet kan vara repetitivt, men syftet är att dela med alla den underbara relationen mellan frekvensomformare och motorer.
Först och främst, varför använda en frekvensomformare för att styra motorn?
Låt oss först kortfattat förstå dessa två enheter.
Motorn är en induktiv belastning som hindrar strömförändringar. Under uppstart kommer den att producera en stor förändring i strömmen.
En frekvensomvandlare är en enhet som använder på/av-funktionen hos krafthalvledarenheter för att omvandla strömförsörjningsfrekvensen till en annan frekvens av elektrisk energi för kontrolländamål. Den består huvudsakligen av två delar: huvudkretsen (likriktarmodul, elektrolytisk kondensator och växelriktarmodul) och styrkretsen (omkopplande strömförsörjningskort och styrkrets).

För att minska elmotorns startström, speciellt för motorer med högre effekt, ökar även startströmmen när effekten ökar. Överdriven startström kan medföra en större belastning på kraftdistributionsnätet. En frekvensomformare kan dock lösa detta problem genom att tillåta mjuk uppstart utan att orsaka för höga startströmmar.
En annan funktion med att använda en frekvensomformare är varvtalsreglering för motorer. I många fall är det nödvändigt att kontrollera motorhastigheten för att uppnå bättre produktionseffektivitet. Frekvensomvandlare har alltid varit kända för sin förmåga att reglera hastigheten genom att ändra källfrekvensen.

Vilka är styrmetoderna för frekvensomformare?
De fem vanligaste sätten att styra motorer med frekvensomformare är följande:
Lågspännings frekvensomvandlarens allmänna utgångsspänning är 380-650V, uteffekten är 0,75-400kW, arbetsfrekvensen är 0-400Hz, och dess huvudkrets använder AC-DC-AC-krets. Dess kontrollmetod har gått igenom fyra generationer.
Sinusformad pulsbreddsmodulering (SPWM) styrmetod med U/f=C
Dess egenskaper är enkel styrkretsstruktur, låg kostnad, god mekanisk hårdhet och kan uppfylla de jämna hastighetsregleringskraven för allmän transmission. Det har använts flitigt i olika branscher.
Men vid låga frekvenser, på grund av den lägre utspänningen och den betydande inverkan av vridmoment på statormotståndsfallet, minskar det maximala utgående vridmomentet.
Dessutom är dess mekaniska egenskaper trots allt inte lika svåra som DC-motorer.
Den dynamiska vridmomentkapaciteten och den statiska hastighetsregleringen är inte tillfredsställande ännu. Systemprestandan är inte heller hög; kontrollkurvan kommer att ändras med belastningsändringar; vridmomentsvaret är långsamt; motorvridmomentutnyttjandegraden är inte hög; prestanda minskar vid låga hastigheter på grund av statorresistans och inverterns dödzonseffekter som existerar medan stabiliteten försämras etc.. Därför har människor forskat på vektorstyrd varvtalsreglering med variabel frekvens.

Space Vector Pulse Width Modulation (SVPWM) kontrollmetod
Den är baserad på den övergripande genereringseffekten av trefasvågform, med syftet att approximera den ideala cirkulära roterande magnetfältsbanan för motorluftgapet. Den genererar en trefasmodulationsvågform och styr den genom att approximera en cirkel med hjälp av en inskriven polygon.
Efter praktisk användning gjordes förbättringar genom att införa frekvenskompensation för att eliminera hastighetskontrollfel; uppskattning av flödesamplitud genom återkoppling för att eliminera påverkan av statorresistans vid låga hastigheter; och slutande slingor för utspänning och ström för att förbättra dynamisk noggrannhet och stabilitet.
Det finns dock många styrkretslänkar, vridmomentjustering har inte införts, så systemets prestanda har inte förbättrats i grunden.

Vektorkontrollmetod (VC).
Metoden för reglering av variabel frekvenshastighet vid vektorstyrning är att omvandla statorströmmarna Ia, Ib, Ic för asynkronmotorer till tvåfasiga växelströmsströmmar Ia1Ib1 under stationära koordinatsystem genom trefas-till-tvåfas transformation. Sedan omvandlas de till DC-strömmar Im1 och It1 under synkrona roterande koordinatsystem genom rotationstransformation för rotorfältsorientering (där Im1 motsvarar magnetiseringsström i DC-motorer; It1 motsvarar ankarström proportionell mot vridmoment). Styrmängden för DC-motorer erhålls genom att imitera deras styrmetoder. Efter att motsvarande inversa koordinattransformationer har utförts kan asynkron motorstyrning uppnås.

I huvudsak är AC-motorer ekvivalenta med DC-motorer och oberoende styrning tillämpas separat för hastighets- och magnetfältskomponenter. Genom att först styra rotorflödet och sedan sönderdela statorströmmen till moment och magnetfältskomponenter följt av ortogonal eller frikopplad styrning via koordinattransformationer. Förslaget om vektorstyrningsmetod var revolutionerande men svårt i praktiken på grund av svårigheter att observera rotorflödet noggrant vilket i hög grad påverkar systemets egenskaper såväl som komplexa vektorrotationstransformationer som används under ekvivalenta DC-motorkontroller vilket gör faktiska resultat hårt pressade att uppnå idealiska analytiska resultat.
Den specifika metoden är:
Styr statorns magnetiska flöde genom att införa en statormagnetiskt flödesobservatör för att uppnå sensorlös kontroll;
Automatisk identifiering (ID) förlitar sig på exakta matematiska modeller av motorn för att automatiskt identifiera motorparametrar;
Beräkna verkligt vridmoment, statormagnetiskt flöde och rotorhastighet i realtid baserat på faktiska värden som motsvarar statorimpedans, ömsesidig induktans, magnetiska mättnadsfaktorer, tröghet, etc.;
Förverkliga Band-Band-styrning genom att generera PWM-signaler enligt det magnetiska flödet och vridmomentet för att styra växelriktarens kopplingstillstånd.

AC-frekvensomvandlare av matristyp har snabbt vridmomentsvar (<2ms), höghastighetsnoggrannhet (±2%, ingen PG-återkoppling), hög vridmomentnoggrannhet (<+3%); samtidigt har den också högre startvridmoment och hög vridmomentnoggrannhet, särskilt vid låga hastigheter (inklusive 0 hastigheter), kan den mata ut 150% ~ 200% av det nominella vridmomentet.
Hur styr frekvensomformaren motorn? Hur kopplas de ihop?
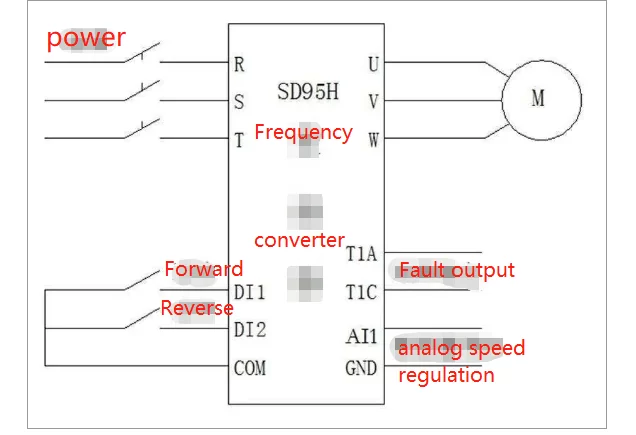
Att koppla in frekvensomformaren för att styra en motor är relativt enkelt, på samma sätt som att koppla en kontaktor. Tre huvudströmledningar ansluts och matas sedan ut till motorn. Det finns dock olika sätt att styra frekvensomformaren.
Låt oss först ta en titt på frekvensomformarens terminalanslutningar. Även om det finns många märken och olika ledningsmetoder för frekvensomformare, har de flesta liknande terminalanslutningar. De inkluderar vanligtvis omkopplaringångar för framåt- och bakåtrotation som används för att styra start och backning av motorer; återkopplingsterminaler som används för att ge feedback om driftstatus såsom körfrekvens, hastighet, felstatus etc.; hastighetsinställningskontroller som kan justeras med potentiometrar eller knappar beroende på olika typer av omvandlare.
Styrning kan uppnås genom fysiska ledningar eller kommunikationsnätverk. Många frekvensomriktare stöder nu kommunikationskontroll, vilket gör att motorstart/stopp, rotation framåt/bakåt, hastighetsjustering och återkopplingsinformation kan överföras via kommunikationslinjen.
När motorns rotationshastighet (frekvens) ändras, vad händer med dess utgående vridmoment?
Startmomentet och det maximala vridmomentet när det drivs av en frekvensomformare bör vara mindre än när det drivs direkt av nätström.
När motorn drivs av nätström uppstår en stor start- och accelerationspåverkan. Men när de drivs av en frekvensomformare är dessa effekter svagare. Direktstart vid nätfrekvens ger en stor startström. När du använder en frekvensomvandlare läggs omvandlarens utspänning och frekvens gradvis till motorn, så startströmmen och påverkan på motorn blir mindre.

Vanligtvis, när frekvensen minskar (hastigheten minskar), minskar också vridmomentet som genereras av motorn. De faktiska uppgifterna för denna minskning finns i vissa manualer för frekvensomformare.
Genom att använda en vektorstyrningsmetod med magnetisk flödesstyrningsomriktare kan den förbättra otillräckligt låghastighetsvridmoment hos motorer så att även vid låga varvtal kan tillräckligt vridmoment matas ut.
Vid justering till frekvenser större än 50 Hz med en frekvensomriktare (VFD), kommer motorns utgående vridmoment att minska.
Konventionella motorer är designade och tillverkade enligt 50Hz spänningsstandarder; deras nominella vridmoment anges också inom detta spänningsområde. Därför kallas hastighetsreglering under nominella frekvenser konstant-vridmomenthastighetsreglering (T=Te,P<=Pe).
Eftersom VFD-utgångsfrekvenserna överstiger 50Hz, minskar det linjära förhållandet mellan producerade vridmoment från motorer proportionellt med ökande frekvenser.
Vid körning med hastigheter över 50 Hz måste hänsyn tas till att förhindra otillräckliga utgående vridmoment från att uppstå på grund av belastningsstorlek på elmotorer.
Till exempel skulle det producerade vridmomentet för en elmotor som arbetar vid 100 Hz minska med ungefär hälften jämfört med det som produceras vid drift vid 50 Hz.
Därför kallas hastighetsreglering över nominella frekvenser konstanteffekthastighetsreglering (P=Ue*Ie).
Användning av frekvensomformare över 50Hz
Som vi vet, för en specifik motor är dess märkspänning och ström konstanta.
Om märkvärdena för både frekvensomformaren och motorn är 15kW/380V/30A, kan motorn arbeta vid frekvenser över 50Hz.
När hastigheten är 50Hz är utspänningen från frekvensomformaren 380V och strömmen 30A. Om vi ökar utfrekvensen till 60Hz, så kommer frekvensomformarens maximala utspänning och ström fortfarande bara vara 380V/30A. Uppenbarligen, eftersom uteffekten förblir oförändrad, kallas detta konstant effekthastighetsreglering.

Hur är det med vridmomentet i det här fallet?
Eftersom P=wT (P: effekt; w: vinkelhastighet; T: vridmoment), om P förblir konstant men w ökar, kommer T att minska i enlighet med detta.
Vi kan också se det från ett annat perspektiv:
Statorspänningen U=E+I*R (I: ström; R: elektriskt motstånd; E: inducerad elektromotorisk kraft) för en motor,
Det kan ses att när U och jag förblir oförändrade så förblir E också oförändrade.
Och E=kfX (k: konstant; f: frekvens; X:magnetiskt flöde). Därför när f ändras från 50-->60Hz,X minskar i motsvarande grad.
För en motor är T=KjagX(K:konstant;I:ström;X:magnetiskt flöde). Allteftersom det magnetiska flödet X minskar, kommer T därför att minska i motsvarande grad.

At less than or equal to 50 Hz,I*R is small so when U/f=E/f does not change,magnetic flux(X)is constant.Torque(T)and electric current(I)are proportional.This explains why overload(torque)capacity of a variable-frequency drive(VFD)is usually described by its overcurrent capacity,and referred to as "constant-torque"speed regulation(rated current remains unchanged-->maximalt vridmoment förblir oförändrat).
Slutsats: När utgångsfrekvensen från en frekvensomformare ökar från över 50 Hz, kommer motorns utgående vridmoment att minska.
Andra faktorer relaterade till utgående vridmoment
Värme- och kylkapaciteten bestämmer växelriktarens utströmskapacitet, vilket påverkar växelriktarens utgående vridmomentkapacitet.
Bärvågsfrekvens: Den märkström som indikeras av allmänna växelriktare är baserad på det värde som kontinuerligt kan matas ut vid högsta bärfrekvens och högsta omgivningstemperatur. Att minska bärfrekvensen påverkar inte motorströmmen. Däremot kommer komponentuppvärmningen att minska.
Omgivningstemperatur: Precis som att öka skyddsströmvärdet för växelriktaren vid detektering av låg omgivningstemperatur är onödigt.
Höjd över havet: Att öka höjden påverkar både värmeavledning och isoleringsförmåga. I allmänhet kan det ignoreras under 1000m, och en kapacitansminskning på 5% per 1000 meter över denna nivå är tillräcklig.

Hur justerar man frekvensen på motorn som styrs av frekvensomriktare?
I ovanstående sammanfattning har vi lärt oss varför det är nödvändigt att använda en frekvensomformare för att styra motorn och hur den fungerar. Styrningen av motorn av frekvensomriktaren kan sammanfattas i två punkter: för det första, styrning av motorns startspänning och frekvens med frekvensomriktaren för att uppnå mjuk start och stopp; för det andra, justering av motorns hastighet genom att ändra dess frekvens genom att använda en frekvensomformare.
Det var en praktisk fråga som ställdes av nätanvändare: vilken är den lägsta frekvensen som kan justeras när man styr en vanlig motor med en variabel frekvensomformare? För närvarande har den justerats till 60Hz och ledaren bad mig att fortsätta öka Hz-talet. Planen är att justera den till 100Hz. Har någon någonsin justerat den till 100Hz? (Vilka faktorer måste beaktas i liknande situationer?)

Låt oss se hur nätanvändare svarar:
Netizen lpl53: Vi har nått 200HZ på industriella tvättmaskiner, men strömmen är inte hög.
Netizen26584: Motorn i slipmaskinen är i allmänhet mellan 100-110...
Netizen 82252031: Om det finns tillräckligt med ström och ingen överdriven ström i motorn kan det fungera. Uppmärksamhet bör dock ägnas åt att mäta temperaturen på motorlager, onormalt ljud och vibrationer. En motor med variabel frekvens går på 70-80Hz under lång tid; sexpoliga motorer är lätta att prova medan tvåpoliga motorer kräver försiktighet.
Netizen fsjnzhouyan: Detta beror på kvaliteten på silikonstålplåtar som används i motorer. I tidigare användningsfall var det vanligtvis inga problem fram till runt 85Hz; Men många motorer kan inte nå sin nominella hastighet efter att ha justerats upp till runt 90Hz på grund av magnetisk mättnad.
Netizen ZCMY: Det är bäst om du byter ut dina motorlager med höghastighetslager. Testa även för vibrationer och se till att de är lämpliga för belastningar som fläktar eller vattenpumpar.
Netizen mengx9806: Jag justerade den en gång till 1210HZ med Dongyuans elektriska maskinserie A1000 med variabel frekvens som körde utan problem i två år i sträck utan att större problem uppstod även om mindre problem kan uppstå om något går fel.
Netizen 68957:Jag har försökt justera den fram till 180, men den gick bara en kort stund.
Netizen 1531214350: Jag har reparerat tvättmaskiner tidigare och motorn var en vanlig sådan. Den gick vid 150 HZ under centrifugering.
Ya de Ya: Om frekvensen för en vanlig motor är högre än dess nominella frekvens med 20 %, kommer hastighetsskillnaden att öka; när frekvensen ökar, ökar även denna hastighetsskillnad.

Netizen kdrjl: Det verkar som att det fortfarande finns för lite förståelse för den grundläggande strukturen och användningen av AC-induktionsmotorer. Den högsta hastighetsgränsen för reglering av induktionsmotorer ligger inte i frekvensomriktare. Generellt sett arbetar vanliga frekvensomriktare vid frekvenser som inte är lägre än 400Hz i V/F-läge (till exempel Siemens frekvensomriktare arbetar vid 600Hz). För vektorstyrning är den maximala driftfrekvensgränsen 200-300Hz medan servostyrning har ännu högre gränser. Därför, om du vill reglera din induktionsmotors hastighet upp till 100Hz med hjälp av en frekvensomriktare, finns det inga tekniska hinder eller tvivel i denna fråga.
Den mekaniska strukturen hos en induktionsmotorrotor - såsom dess burstruktur - bestämmer dess mekaniska styrka som är relaterad till dess designs maximala rotationshastighet; ju snabbare den roterar, desto större blir centrifugalkraften. Därför uppfyller den i allmänhet designspecifikationer baserat på deras maximala rotationshastigheter, och deras mekaniska styrkor kan inte vara oändligt stora. Rotorlagren har också en maximal rotationsgräns. Så när du kör över dessa värden måste du förstå vad dessa gränser är och byta ut dem med höghastighetslager om det behövs.
Slutligen bör den dynamiska balansfelsökningen och inställningen av rotorn inte överstiga tillverkarens angivna parametrar.
Sammanfattningsvis, när du reglerar en induktionsmotors hastighet genom en applikation med variabel frekvens som överstiger 100 Hz, är det viktigt att först rådgöra med tillverkare om det kan göras eller begära anpassade motorer istället, för att säkerställa tillförlitlighet under höghastighetsförhållanden. besluta att inte gå igenom tillverkare måste du först bestämma rotorns dynamiska balanstest och sedan bekräfta lagrets maximala rotationshastighet.

Om det överstiger detta värde måste du ersätta dem med höghastighetslager som kan uppfylla kraven på plats. Du måste också överväga problem med värmeavledning.
Slutligen, baserat på erfarenhet, bör induktionsmotorer med effekt under 100kW vara relativt lämpliga för att köras vid frekvenser inom 100Hz; dock är de som överstiger 100kW bäst anpassade snarare än att välja konventionella produkter för allmänna ändamål.
Netizen lvpretend: Det beror främst på själva motorn. Om det ursprungligen är en tvåpolig motor med hög effekt måste försiktighet iakttas. Industriella tvättmaskiner är exempel på frekvent övervarvsdrift, men deras nominella hastigheter är generellt låga - mestadels sexpoliga motorer. Jag har sett fyrpoliga motorer nå upp till 120 Hz.
Mer information, vänligen kontakta professionell elmotortillverkare - Dongchun motor Kina direkt






