 Hoppa till innehållet
Hoppa till innehållet Vad är skillnaden mellan en borstlös motor och en borstad motor?
Vad är skillnaden mellan en synkronmotor och en asynkronmotor?
Vad sägs om den lindade rotorinduktionsmotorn?
Är alla servomotorer AC-motorer?
Är alla servomotorer synkronmotorer?
Tillhör stegmotorer DC-motorer eller AC-motorer?
Är en servomotor en servomotor? ......
Vissmännen sa en gång: Om kunskap inte är systematisk, vad är skillnaden mellan den och ett stycke?
Men vismannens bok om den långrandiga texten, den där fantasifulla terminologin, den där rimliga förklaringen, tittar verkligen på människor i molnen.
Jag har också sökt på Internet länge, inte hittat en mer systematisk förklaring av elmotorernas struktur och klassificeringsprincip, så de tog mycket ansträngning för att fråga och organisera en kopia.
Den här artikeln försöker förklara den systematiska kunskapen i klarspråk och använder mycket animationer och bilder för att uttrycka den dunkla kunskapen levande.
På grund av min begränsade kunskap är det oundvikligt att det blir många misstag, rätta gärna experterna, tveka inte att ge råd.
1. ett diagram för att förklara de grundläggande typerna av elmotorer

2. DC elmotor - borstmotor
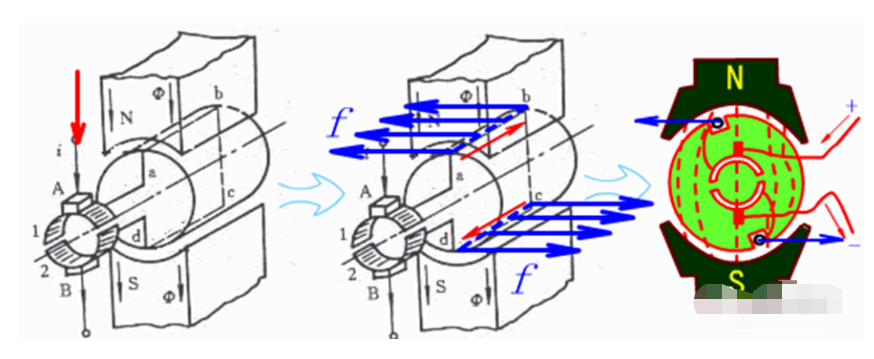
Läs gymnasiets fysik av mobbare avskum vet, för att studera den strömförande ledaren i magnetfältskraften hos den saken, har vi tränat vänster hand till en bruten handflata, vilket är exakt principen för DC-induktionsmotor.
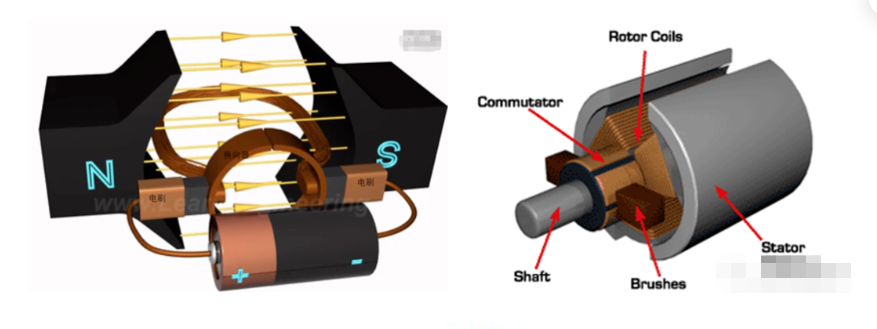
Alla elmotorer är sammansatta av stator och rotor, i DC elmotorer, för att få rotorn att svänga, måste du hela tiden ändra strömriktningen, annars kan rotorn bara vrida ett halvt varv, det här är som en cykelpedal .
Det är därför DC-motorer behöver kommutatorer.
I stort sett inkluderar borstade DC-motorer borstade motorer och borstlösa motorer.
Borstmotor kallas också DC-induktionsmotor eller kolborstmotor, ofta kallad borst-DC-motor.
Den använder mekanisk kommutering, den yttre polen flyttar inte den interna spolen (armaturen) rör sig, kommutatorn och rotorspolen roterar tillsammans, borstar och magneter rör sig inte, så kommutatorn och borstens friktionsfriktion, slutför den nuvarande riktningsväxlingen.
Nackdelar med borstmotor.
1, mekanisk kommutering av gnistor som genereras av kommutatorn och borstfriktion, elektromagnetisk interferens, högt brus, kort livslängd.
2, dålig tillförlitlighet, många fel, som kräver frekvent underhåll.
3, på grund av närvaron av kommutator, begränsar rotorns tröghet, begränsar den maximala hastigheten, påverkar den dynamiska prestandan.
Eftersom det har så många brister varför det fortfarande används ofta, eftersom det är högt vridmoment, enkel struktur enkelt underhåll (dvs. byta kolborstar), billig.
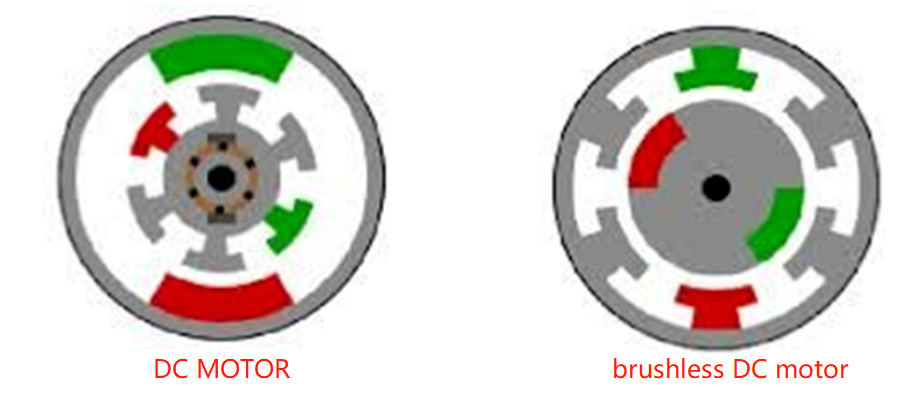
2. DC-motorer - borstlösa motorer
Borstlös motor kallas även DC-invertermotor (BLDC) i vissa områden, den använder elektronisk kommutering (Hall-sensor), spolen (armaturen) flyttar inte magnetpolerna rör sig, då kan permanentmagneten vara utanför spolen eller inuti spolen , så det finns en extern rotor borstlös motor och intern rotor borstlös motor
Borstlösa motorer är konstruerade på samma sätt som permanentmagnet synkronmotorer.
En enda borstlös motor är dock inte ett komplett kraftsystem. Borstlös måste i princip styras av en borstlös kontroller, även känd som en ESC, för att uppnå kontinuerlig drift.
Det är den borstlösa elektroniska regulatorn (ESC) som verkligen avgör dess prestanda.
Generellt finns det två typer av drivströmmar för borstlösa motorer, den ena är en fyrkantvåg och den andra är en sinusvåg.
Ibland kallas den förra en DC-borstlös motor, och den senare kallas en AC-servomotor, vilket är exakt en sorts AC-servomotor.
Borstlösa motorer fungerar på olika sätt och kan delas in i borstlösa motorer med inre rotor och borstlösa motorer med yttre rotor.
Den inre rotorn är trefas, vilket är dyrare.
Den yttre rotorn används vanligtvis i enfas, priset på folket, massproduktion har varit nära kolborstmotorn, så de senaste åren används ofta.
Priset på den trefasiga yttre rotorn är nära priset på den inre rotorn.
Tja, som du kan gissa, är nackdelen med borstmotorer poängen med borstlösa motorer.
Den har hög effektivitet, låg energiförbrukning, lågt brus, lång livslängd, hög tillförlitlighet, servokontroll, steglös frekvensomvandlingshastighet (upp till mycket hög hastighet) och andra fördelar.
Det är relativt mindre än borstens DC-motor, kontroll än den asynkrona AC-motorn är enkel, startmomentet är stor överbelastningskapacitet, som för nackdelarna ...... är dyrare än borsten, dåligt underhåll.
2. DC-motor - varvtalsregleringsprincip
DC-induktionsmotorhastighetsreglering: den så kallade hastighetsregleringen, det vill säga genom att justera motorhastigheten för att erhålla det erforderliga vridmomentet.
permanent magnet likströmsmotor genom att justera spänningen, serieresistans, ändra excitationen kan vara hastighet, men den faktiska spänningsjusteringen är den mest bekväma och mest använda, den huvudsakliga användningen av PWM hastighetsreglering.
PWM är faktiskt genom höghastighetsomkopplaren för att uppnå DC-spänningsreglering, en cykel, öppna en lång tid, den genomsnittliga spänningen är hög, av en lång tid, den genomsnittliga spänningen är låg, mycket bekväm att justera, så länge omkopplaren hastighet Så länge omkopplingshastigheten är tillräckligt hög är övertonerna i nätet mindre och strömmen är mer kontinuerlig.
Borstarna och kommutatorn slits dock länge och samtidigt sker en enorm strömförändring under kommutering, vilket är mycket lätt att producera gnistor.
Kommutatorn och borstarna begränsar kapaciteten och hastigheten för DC-induktionsmotorn, vilket gör att hastighetsregleringen av DC-induktionsmotorn möter en flaskhals.
För borstlös DC-induktionsmotor styr hastighetskontrollen endast inspänningen på ytan.
Men motorns självstyrande frekvenskontrollsystem (borstlös likströmsmotor själv levereras med en rotorpositionsdetektor och annan rotorpositionssignalinsamlingsanordning, med hjälp av denna enhets rotorpositionssignal för att styra fasändringsmomentet för styrenheten för variabel spänningsfrekvens) styr automatiskt frekvensen enligt den variabla spänningen, som är nästan samma som DC (borstad) motorn, mycket bekvämt. Mycket bekvämt.
Eftersom rotorn använder permanentmagneter, ingen speciell excitationslindning, i fallet med samma kapacitet, är motorn mindre, lättare, effektivare, mer kompakt, mer tillförlitlig drift, bättre dynamisk prestanda, vid drivning av elfordon och andra aspekter har använts i stor utsträckning.
3. Trefas AC-motorer - asynkronmotorer
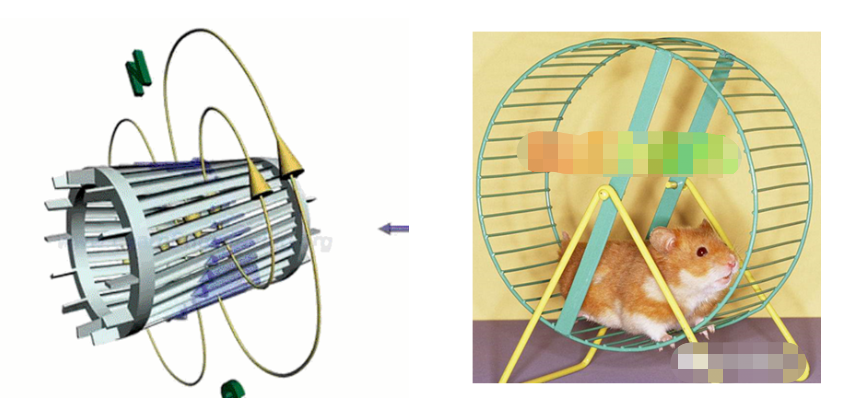
AC-motorer är uppdelade i synkronmotorer och asynkronmotorer, synkronmotorer används mest i generatorer och asynkronmotorer används mest i elmotorer. De är induktionsmotorer för ekorrbur.
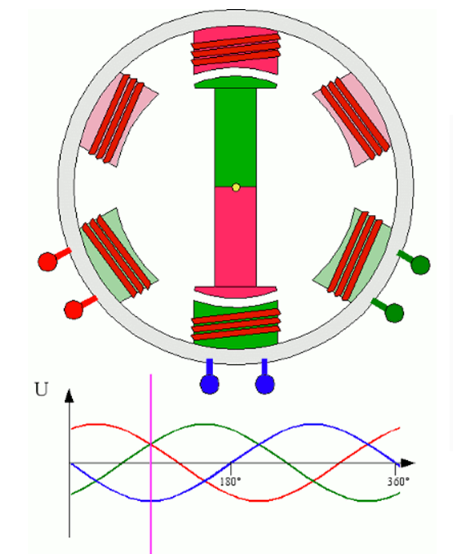
Motorns hölje är statorn, och det finns tre symmetriska AC-lindningar på statorn.
När sekvensen av de tre faserna ändras, bildas ett roterande syntetiskt magnetfält, och magnetfältets rotationshastighet är den synkrona hastigheten.
Synkronhastigheten n=60f/p, f är frekvensen, p är antalet polpar, till exempel för en 2-polig motor ansluten till det nationella nätet 50Hz (dvs antalet polpar är 1 par), sedan hastigheten n=60*50/1=3000r/min.
På liknande sätt är synkronhastigheten för 4-poliga, 6-poliga och 8-poliga motorer 1500, 1000 och 750.
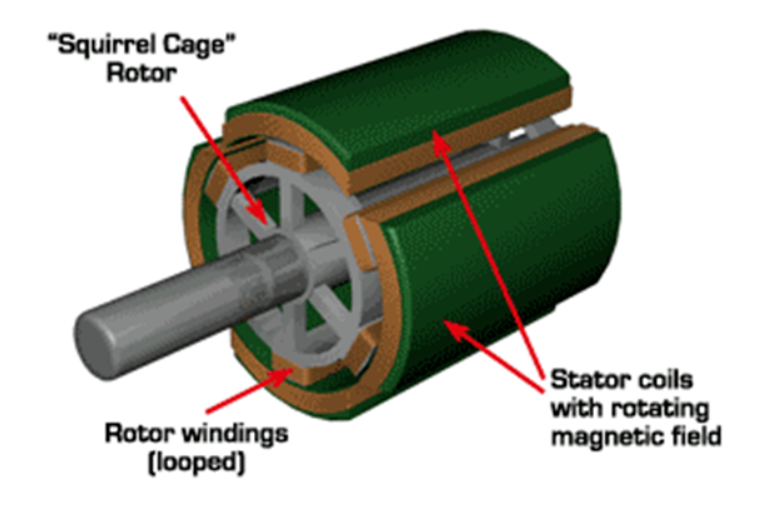
Asynkronmotorer har en enkel mekanism med en stängd spolrotor, till exempel en ekorrbur typ.
Rotorspolen kommer att skära av det roterande magnetfältet för att generera den inducerade elektriska potentialen, som i sin tur genererar den inducerade strömmen och slutligen det roterande magnetfältet.
Så att rotorn blir en elektromagnet och följer rotationen av statorns magnetfält, så rotorhastigheten måste vara < statorns roterande magnetfält, för att skära av de magnetiska induktionslinjerna.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Det vill säga rotorns asynkrona hastighet <synkron hastighet, det finns en hastighetsskillnad mellan rotorns och statorns magnetfält, så det kallas en asynkronmotor.
Den nominella hastigheten för asynkronmotor varierar något från tillverkare till tillverkare, ca 2800+r/min för 2-polig motor, 1400+,950+,700+ för 4-polig, 6-polig och 8-polig asynkronmotor.
Hastigheten på asynkronmotorn är hög när ingen belastning är, och minskar när det finns en belastning.
Asynkron motor har enkel struktur, enkelt underhåll, pålitlig drift och billigt pris, så den används ofta.
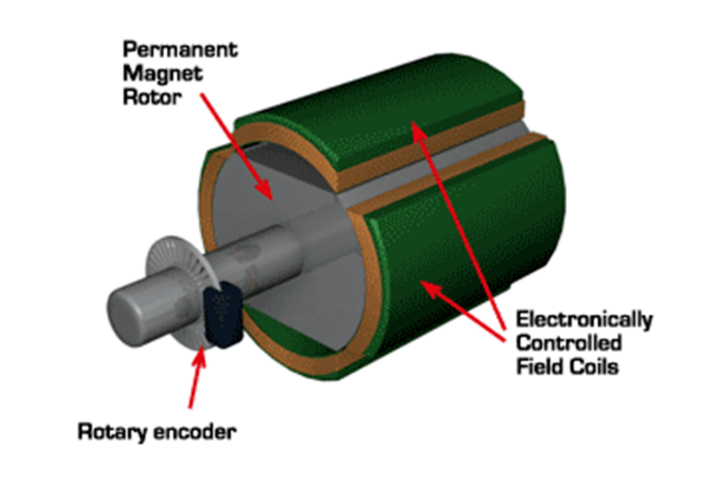
4. Trefas AC-motorer - synkronmotorer
Synkronmotor.
Om du låter rotorhastigheten = rotationshastigheten för statormagnetfältet, blir det en synkronmotor, vid denna tidpunkt är det nödvändigt att förvandla statorn till en elektromagnet eller permanentmagnet, det vill säga för att aktivera statorn, behöver inte längre att skära den magnetiska induktionsledningen kan rotera, rotationshastigheten och magnetfältets rotationshastighet är densamma, det vill säga bildandet av synkronmotor.
Synkronmotorrotorstrukturen är mer komplex än asynkronmotorer, höga priser, i produktionslivslängden används inte lika ofta som asynkronmotorer, främst används som generatorer, nu termiska kraftverk, vattenkraftverk, ångturbiner, hydrauliska turbiner är i princip synkronmotorer.
5. Trefas AC-motor - asynkrona elmotorer hastighetsreglering
Asynkron motorhastighetsreglering: teoretiskt, asynkron motorstyrning AC-frekvens, spänning eller rotormotstånd, kan motorpolfördelning vara hastighetsreglering, men i praktiken för att uppnå oändlig hastighetsreglering med metoden för att justera frekvensen och spänningen för att uppnå.
På grund av spänningsregleringen hastighetsområdet är inte stort, i allmänhet kan endast användas i hastighetskontroll krav är inte höga tillfällen, är tillämpningen inte utbredd.
Variabel frekvenshastighetsreglering: På tal om frekvens, vi kanske har hört talas om det.
Det fullständiga namnet på frekvensomvandlingen är Variable Voltage Variable Frequency (VVVF), vilket innebär att spänningen ändras när frekvensen ändras, så att hastighetsområdet för asynkronmotorn är tillräckligt stort.
Frekvensomformare kan delas in i två breda kategorier: AC-AC frekvensomformare och AC-DC frekvensomformare.
AC-DC-växelriktare: Växelström omvandlas direkt till växelström av en annan frekvens av kraftelektronik.
Den maximala utfrekvensen kan inte överstiga hälften av ingångsfrekvensen, så den används i allmänhet endast i system med låg hastighet och hög kapacitet och kan eliminera behovet av en enorm växelreducerare.
AC-DC-växelriktare kommer att likrikta växelström till likström först och sedan omvandla den till växelström med kontrollerbar frekvens och spänning genom växelriktare, med PWM-teknik kan denna typ av växelriktare realisera ett brett utbud av variabel spänning och frekvens.
För elfordon är asynkronmotorn hållbar, stark överbelastningskapacitet och styralgoritmen är så mogen att den kan användas helt.
6. Trefas AC-motor - hastighetsreglering av synkronmotor
Synkron motorhastighetsreglering:
Synkrona maskiner har ingen nedgångshastighet, och styrspänningen kan inte ändra hastigheten när strukturen bestäms, så innan frekvensomvandlare uppträdde var synkronmotorer helt oreglerade.
Frekvensomformarens utseende gör att AC-synkronmotorn också har ett enormt varvtalsregleringsområde, eftersom dess rotor också har oberoende excitation (permanent magnet eller elektrisk excitation), dess hastighetsregleringsområde är bredare än asynkronmotorns, och synkronmotorn har fått ett nytt liv.
Synkronmotor variabel spänning variabel frekvens varvtalsregleringssystem kan delas in i annan kontrollerad variabel hastighetskontroll och självkontrollerad variabel hastighetskontroll.
För annan styrd variabel frekvenshastighetsreglering liknar den variabel frekvensreglering av asynkronmotor, som kan styras av SVPWM och andra styrmetoder enligt dess matematiska modell, och dess prestanda är bättre än den för en vanlig asynkron AC-motor.
Självstyrd invertersynkronmotor brukade ha en mängd olika namn i utvecklingsprocessen, såsom kommutatorlös motor; när du använder permanentmagneter och matar in trefas sinusvåg, kan det kallas sinusvåg permanent magnet synkronmotor; och om man matar in fyrkantvåg, så kan det kallas trapetsvåg permanent magnet synkronmotor, ja, det liknar den tidigare nämnda borstlösa DC-maskinen (BLDM), vi känner inte att en stor cirkel av rap har vänt Gå tillbaka, men du måste nu ha en djupare förståelse för variabel hastighet, så borstlös DC-motor när du använder DC-ingång, men användningen av synkronmotorns frekvensomvandlingsteknik (samma struktur som permanentmagnetens synkronmotor), i Model3 om användningen av DC-borstlös motor .
7. Enfas AC asynkronmotor - enfas AC seriespänningsmotor (borste)
Enfas AC-serie-exciterad motor, allmänt känd som serie-exciterad motor eller universalmotor (UniversalMotor utländskt namn, uppkallad på grund av AC och DC universal), ankarlindningen och excitationslindningen är anslutna i serie för att fungera tillsammans.
Enfas serieexciterad motor kallas också AC-DC dual-use serieexciterad motor, som kan arbeta med antingen växelström eller likström.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
Fördelarna med enfas serieexciterad motor är att den har hög hastighet, högt startmoment, liten storlek, lätt vikt, inte lätt att blockera rotation, brett utbud av tillämplig spänning och kan hastighetsregleras med metoden för spänningsreglering , vilket är enkelt och lätt att realisera.
Därför används det ofta i elverktyg, såsom vinkelslip, handborr, etc.
Strukturen hos enfas serieexciterad motor är mycket lik den för DC-serieexciterade motor, huvudskillnaden är att statorkärnan hos enfas serieexciterad motor måste vara gjord av laminerat kiselstål, medan magnetpolerna av DC kan göras av både laminerad och integrerad struktur.
Enfas serieexciterad motorhastighetsreglering, de flesta av metoderna som används för att justera spänningen, är att ändra den elektriska potentialen.
Spänningsregleringsmetoden för enfas serieexciterad motor använder kontrollerad fasskiftande spänningsreglering, som använder triggerspänningen för SCR för att släpa efter inspänningen för att uppnå fasförskjutningstriggern för inspänningen.
Det finns hård- och mjukvarumetoder i implementeringen.
Den reglerade spänningsmetoden, med användning av kiselstyrd hastighetskontrollteknik, har en enkel linje, liten storlek på komponenter och andra egenskaper hos en kiselstyrd enkel och effektiv metod
(a) Växelströmsvariationskurva;
(b) Rotationsriktning för rotorn när strömmen är positiv halvvåg
(c) Rotationsriktning för rotorn när strömmen är negativ halvvåg

8. Enfas AC asynkron motor - enfas AC ekorrbur motor (borstlös)
Enfasström genom ankarlindningen producerar ett pulserande magnetfält snarare än ett roterande magnetfält, så enfas asynkronmotorer kan inte självstartas.
För att lösa startproblemet är enfas växelströmsdrivna asynkronmotorer ofta faktiskt gjorda för att vara tvåfas.
Huvudlindningen drivs direkt av den enfasiga strömförsörjningen; sekundärlindningen skiljer sig rumsligt från huvudlindningen med 90° (elektrisk vinkel, lika med den mekaniska vinkeln dividerat med antalet motorpolpar).
Sekundärlindningen ansluts till enfas växelströmsförsörjning efter seriekoppling av kondensator eller motstånd, så att strömmen som passerar genom den och strömmen i huvudlindningen har en viss fasskillnad.
Detta gör det syntetiska magnetfältet till ett elliptiskt roterande fält, eller kanske till och med nära ett cirkulärt roterande fält.
Motorn erhåller därmed startmoment.
Motorn som använder motståndsfasseparationsmetoden är billig, till exempel kan sekundärlindningen lindas med en tunnare tråd, men fasseparationseffekten är dålig och energi förbrukas i motståndet.
Efter att motorn startar och når en viss hastighet, tas sekundärlindningen vanligtvis bort automatiskt med en centrifugalomkopplare monterad på motoraxeln för att minska de resistiva förlusterna och förbättra driftseffektiviteten.
Det används i allmänhet för det tillfälle att startmomentkravet inte är högt, såsom liten svarv, litet kylskåp etc. Nackdelen är att hastigheten inte går att justera.
Det är möjligt att göra det syntetiska magnetfältet hos motorn nära det cirkulära roterande magnetfältet vid en viss arbetspunkt hos motorn, för att få bättre arbetsegenskaper.
För att få den delade asynkrona motorn att få bättre startprestanda eller bättre driftegenskaper eller bådadera, är kapacitansen (mängden värde) som krävs olika och kan delas in i tre typer
9. stegmotorer - stegmotorer med öppen slinga
(Open-loop) stegmotorer är öppna-loop-styrda motorer som omvandlar elektriska pulssignaler till vinkelförskjutningar och är extremt flitigt använda.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
Antalet pulser kan styras för att styra mängden vinkelförskjutning, för att uppnå syftet med exakt positionering; Samtidigt kan pulsfrekvensen styras för att styra hastigheten och accelerationen av motorrotationen, för att uppnå syftet med hastighetsreglering.
Stegmotor är en slags induktionsmotor, som fungerar genom att använda en elektronisk krets, det vill säga en drivrutin, för att omvandla likström till en tidsdelningsdriven flerfasig timingstyrström.
Även om stegmotorer drivs av likström, kan de inte förstås som likströmsmotorer, som är kraftmotorer som omvandlar elektrisk likström till mekanisk energi, medan stegmotorer är styrmotorer med öppen slinga som omvandlar elektriska pulssignaler till vinkelförskjutning.
10. Stegmotor - stegservojämförelse
Observera att stegmotorer används i låghastighetsapplikationer - inte mer än 1000r/min per minut, det bästa arbetsområdet är 150~500r/min, (sluten slinga stegar upp till 1500).
2-fas stegmotor vid 60 ~ 70r/min är benägen att få låghastighetsresonansfenomen, genererar vibrationer och brus, vilket måste undvikas genom att ändra reduktionsförhållandet, öka finfraktionen, lägga till magnetiska dämpare, etc.
Försiktighetsåtgärder för indelningsnoggrannhet, när indelningsnivån är större än 4, kan stegvinkelns noggrannhet inte garanteras, höga precisionskrav, det är bäst att byta till fler faser (d.v.s. mindre stegvinkel) av stegmotorn eller stängd- slingsteg, servomotor.
(Open-loop) stegmotor och servomotor 7 olika.
En kontrollnoggrannhet - servomotorstyrningsnoggrannhet kan ställas in enligt givaren, högre noggrannhet.
B lågfrekvensegenskaper - stegmotorer är benägna att vibrationera vid låga frekvenser, servomotorer gör det inte.
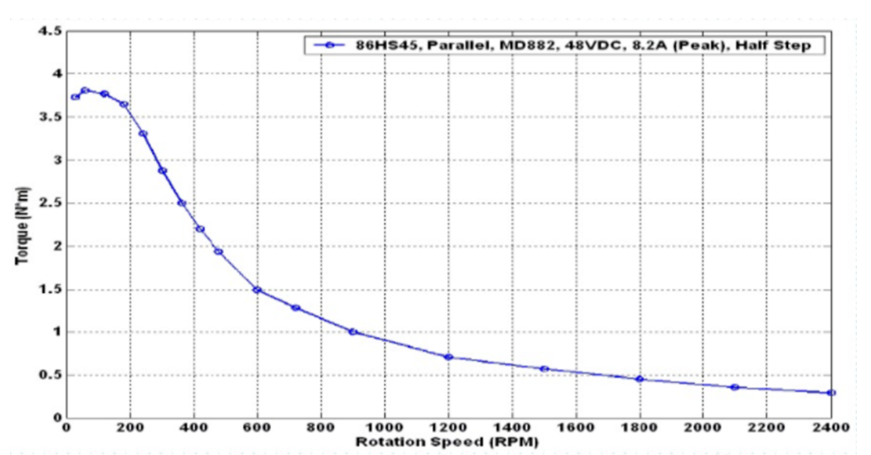
C moment-frekvenskarakteristika - stegmotorns vridmoment blir mindre med ökningen av varvtalet, så dess maximala arbetshastighet är vanligtvis i <1000r/min, servomotor i nominell hastighet (vanligen 3000r/min) kan mata ut det nominella vridmomentet, i nominellt varvtal över den konstanta uteffekten, maximal hastighet på upp till 5000 r/min;.
D överbelastningskapacitet - stegmotor kan inte överbelastas, servomotor maximalt vridmoment kan överbelastas 3 gånger.
E driftsprestanda - stegmotor för styrning med öppen krets, servomotor vid styrning med återkoppling.
F-hastighetssvar - stegmotorns starttid 0,15 ~ 0,5s, servomotor 0,05 ~ 0,1, den snabbaste 0,01s för att nå de nominella 3000r/min.
G effektivitetsindikatorer - stegmotorverkningsgrad på ca 60%, servomotor ca 80%.
I verklig användning kommer att hitta: servomotor dyrt, dyrt av många, så synkronmotorer används mer allmänt, särskilt i positioneringsnoggrannhetskraven är inte särskilt hög synkron remdrift, platt bandtransportör och andra tillfällen använder ofta stegmotor.
11. Stegmotorer - slutna stegmotorer
Stegmotorer med sluten slinga: Förutom stegmotorer med öppen slinga finns det stegmotorer som har en kodare tillagd i änden av motorn, vilket möjliggör styrning med sluten slinga.
Styrning med sluten slinga av stegmotorer använder positionsåterkoppling och/eller hastighetsåterkoppling för att bestämma fasövergångar som är lämpliga för rotorns position, vilket avsevärt kan förbättra stegmotorernas prestanda.
Servosystem utan urstegsfenomen.
Fördelar med stegmotorer med sluten slinga.
1. Höghastighetssvar. Jämfört med motorer med stängda kretsar har en stängare med sluten slinga mycket stark följning av positioneringskommandon, så positioneringstiden är mycket kort. Vid tillämpning av frekvent start/stopp kan positioneringstiden avsevärt förkortas.
2. Generera mer vridmoment än vanliga servo. Kompensera för bristen på stegförlust och låghastighetsvibrationer i vanligt stegsystem.
3. Högt vridmoment kan genereras även under 100 % belastning, utan förlust av stegdrift, utan hänsyn till vridmomentförluster och andra problem som vanliga stegsystem.
4. Genom att använda frekvensomriktaren kan verkningsgraden ökas till 7,8 gånger, uteffekten kan ökas till 3,3 gånger och hastigheten kan ökas till 3,6 gånger.
Den kan få högre körhastighet, stabilare och jämnare hastighet än styrning med öppen slinga.
5. Stegmotorn kommer att stå helt stilla när den stannar, utan mikrovibrationsfenomenet med vanliga servo.
Det kan ersätta tillämpningen av generellt servosystem när låg kostnad och hög precision krävs.
12. stegmotor - jämförelse av stegmotor med sluten slinga
Stegmotorer med sluten slinga justerar automatiskt lindningsströmstorleken enligt storleken på lasten, värme och vibrationer är mindre än stegmotor med öppen slinga, det finns kodarfeedback så noggrannheten är högre än vanliga stegmotorer, motorrespons än öppen slinga stegar långsammare än servomotorer snabbare, det finns ett positionsfel under drift, felet kommer gradvis att minska i millisekunder efter att kommandot stoppas.
Höghastighetsvridmoment än stepper med öppen slinga, vanliga applikationer i 0-1500 rpm tillfällen.
Sammanfattningsvis: stegmotor med sluten slinga med låg kostnad, hög effektivitet, inget jitter, mikrovibrationer utan stopp, hög styvhet, ingen likriktning, hög hastighet, hög dynamisk respons, etc., är ersättningen av högkostnadsservosystem, low-end open-loop stegsystem och andra kostnadseffektiva lösningar
13. Servomotor - Allmän servomotor
Servomotor (servomotor), även kallad ställdonmotor, kan göra styrhastigheten, positionsnoggrannheten mycket exakt, kan omvandla spänningssignalen till vridmoment och hastighet för att driva styrobjektet.
Till skillnad från stegmotorns principstruktur är servomotorn en vanlig DC-motor eller AC-induktionsmotor eftersom styrkretsen är placerad utanför motorn och motordelen inuti.
Servomotorn förlitar sig på pulser för positionering. När servomotorn får 1 puls roterar den med en vinkel motsvarande 1 puls.
Varje gång motorn roterar en vinkel kommer pulsgivaren att skicka ut motsvarande antal återkopplingspulser. Återkopplingspulserna och pulserna som tas emot av servodrivaren bildar en styrning med sluten slinga, så att servodrivaren kan styra motorns rotation mycket exakt för att uppnå exakt positionering.
Servomotorstyrning: Generellt styrs servomotorer för industriellt bruk av tre slingor, nämligen strömslinga, hastighetsslinga och positionsslinga, som kan återkoppla vinkelaccelerationen, vinkelhastigheten och rotationspositionen för motordriften.
Chipet styr drivströmmen för varje fas av motorn genom återkopplingen av de tre, så att motorns hastighet och position kan köras exakt som planerat.
AC servo har funktionen av konstant vridmoment under nominell hastighet, vanlig 200W, 400W låg och medium tröghet AC servo nominell hastighet är 3000rpm, den högsta hastigheten är 5000rpm, hög hastighet.
Vridmomentet är proportionellt mot strömmen, så det kan fungera i vridmomentläget, såsom låsskruvar, pressklämmor och andra tillfällen som behöver konstant vridmoment.
AC servo arbetsljud och vibrationer är mycket små, låg värmeutveckling.
Samma volym av motortröghetsrotorns tröghet är liten, 400W servotröghet motsvarar endast rotortrögheten för en 57 bas 2NM stegmotor.
Servo har en kort tids överbelastningskapacitet, valet måste beakta motoröverbelastningsmultiplikatorn vid acceleration och retardation.
Servot använder sluten-loop-kontroll och har samma positionsspårningsfel som en closed-loop-stepper.
Servo kräver driftsättning före användning.
Det ursprungliga vridmomentet för steg- och servomotorn räcker inte, måste ofta arbeta med reduceraren, du kan använda reduktionsväxelsatsen eller planetreduceraren.
6. Servomotor - servo
Servo är en klass av DC-servomotorer, som först användes för små flygplansmodeller och nu används för små robotleder.
Från strukturanalysen består en servo av en liten likströmsmotor, plus sensorer, kontrollchips och reduktionsväxelsatser, som är monterade i ett integrerat hus.
Den kan styra rotationsvinkeln genom en insignal (vanligtvis en PWM-signal, men också en digital signal).
Eftersom det är en förenklad version förenklas servomotorns ursprungliga treslingstyrning till en slinga, dvs endast positionsslingan detekteras.
En billig lösning är en potentiometer, som detekteras av ett motstånd, medan en avancerad lösning kommer att använda en Hall-sensor, eller en kodare.
Generella servon är billiga och kompakta, men har mycket låg noggrannhet och dålig positionsdämpande förmåga, och kan möta många låga behov.
Med boomen av små robotar av konsumentklass under de senaste två åren har små och lätta servon omedelbart blivit de mest lämpliga ledkomponenterna.
Robotskarvar kräver dock mycket högre prestanda än flygservon, och kräver som kommersiell produkt även servon av mycket högre kvalitet än gör-det-själv-spelare.
Välkommen att dela med oss av mer information om elmotorer i kommentarsfältet!
Alla frågor om elmotor, vänligen kontakta den professionella elmotorn tillverkare i Kina som följer:

Dongchun motor har ett brett utbud av elmotorer som används i olika branscher som transport, infrastruktur och konstruktion.
Få ett snabbt svar.






