Почти половина мирового энергопотребления потребляется электродвигателями, поэтому высокий КПД электродвигателей считается наиболее эффективной мерой в решении мировых энергетических проблем.
В общем, это относится к преобразованию силы, создаваемой потоком тока в магнитном поле, во вращательное действие, а в широком диапазоне также включает линейное действие.
В зависимости от типа источника питания, используемого для привода двигателя, различают двигатели постоянного тока и двигатели постоянного тока. Электродвигатели переменного тока.
А по принципу вращения двигателя его можно условно разделить на следующие категории. (Кроме специальных двигателей)
Электродвигатель постоянного тока /двигатели постоянного тока (постоянного тока)
Коллекторные двигатели
Широко используемые щеточные двигатели обычно называют электродвигателями постоянного тока.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Бесщеточный двигатель постоянного тока
В бесщеточных двигателях постоянного тока не используются щетки или коммутаторы, но используется функция переключения, такая как транзистор, для переключения тока и выполнения вращательного действия.
Шаговый двигатель.
Этот двигатель работает синхронно с импульсной мощностью, поэтому его еще называют импульсным асинхронным двигателем.
Он характеризуется возможностью легкого достижения точного позиционирования.
двигатели переменного тока
Асинхронный двигатель
Энергия переменного тока создает вращающееся магнитное поле в статоре, которое, в свою очередь, генерирует индуцированный ток в роторе, при взаимодействии с которым происходит вращение асинхронного двигателя переменного тока.
Синхронный двигатель
Мощность переменного тока создает вращающееся магнитное поле, и ротор с магнитными полюсами вращается за счет притяжения.
-Скорость вращения к счастью синхронизирована с частотой блока питания.
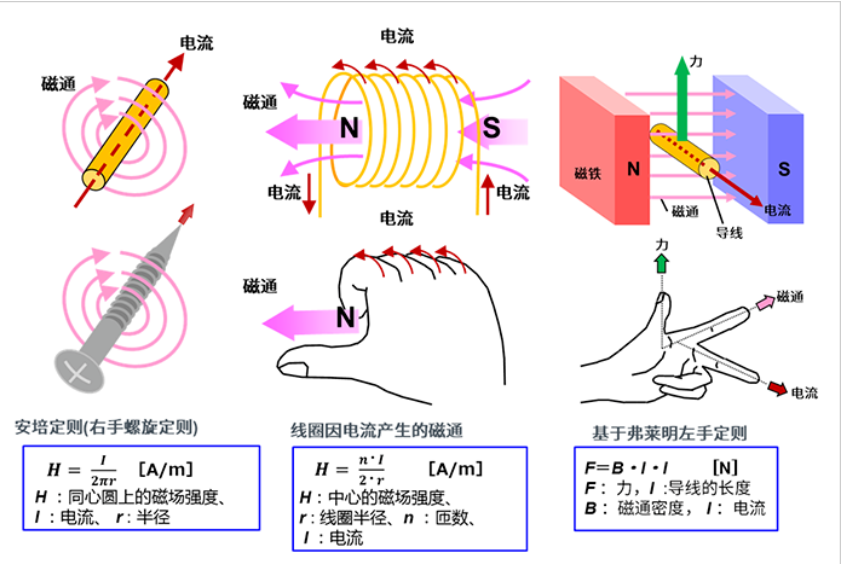
О токах, магнитных полях и силах
Во-первых, ради последующих объяснений принципов работы двигателя, давайте рассмотрим основные законы/законы, касающиеся тока, магнитного поля и силы.
Хотя есть чувство ностальгии, легко забыть эти знания, если вы обычно не используете магнитные компоненты.
Мы объединяем изображения и формулы для иллюстрации.
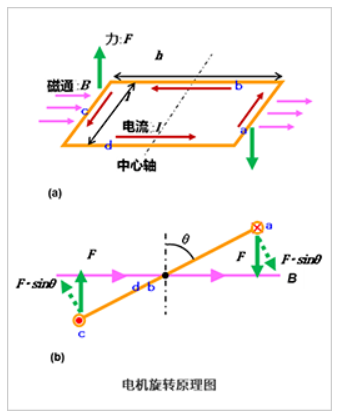
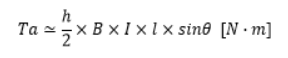
При прямоугольной форме проволочного каркаса учитывается сила, действующая на ток.
Сила F, действующая на части сторон а и с, равна
Крутящий момент создается с центральной осью в качестве центральной оси.
Например, при рассмотрении состояния, в котором угол поворота равен только θ, сила, действующая под прямым углом к b и d, равна sinθ, поэтому крутящий момент Ta части a определяется как:
Рассматривая часть c таким же образом, крутящий момент удваивается и генерирует крутящий момент, вычисляемый по следующему уравнению
Поскольку площадь прямоугольника равна S = h・l, подстановка ее в приведенное выше уравнение дает следующий результат.
Формула применима не только к прямоугольникам, но и к другим распространенным формам, таким как круги. Двигатель использует этот принцип.
Как вращается электродвигатель?
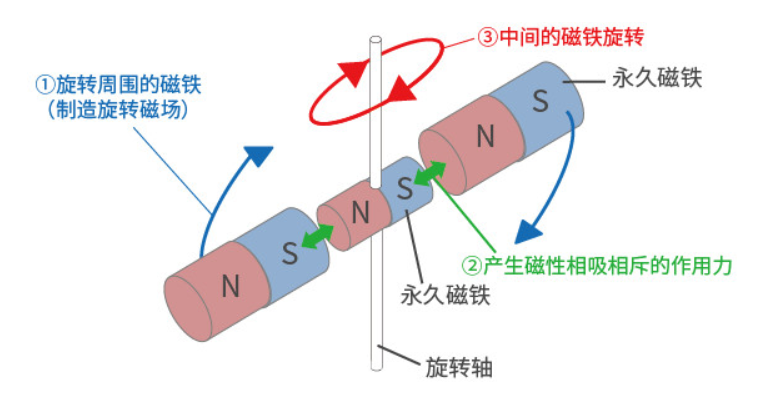
1) Асинхронные двигатели вращаются с помощью магнитов и магнитной силы.
Вокруг постоянного магнита с вращающимся валом,
① магнит вращается (так что создается вращающееся магнитное поле),
② затем по принципу, что полюса N и S притягиваются друг к другу на разных полюсах и отталкиваются друг от друга на одном уровне,
③ магнит с вращающимся валом будет вращаться.
Это основной принцип вращения двигателей переменного тока.
Ток, протекающий в проводнике, вызывает вращающееся магнитное поле (магнитную силу) вокруг него, и, таким образом, магнит вращается, что является практически таким же состоянием действия, как это.
Кроме того, когда провод намотан в форме катушки, магнитная сила синтезируется, создавая большой поток магнитного поля (поток), который создает полюса N и S.
Кроме того, при вставке железного сердечника в спиральный провод силовые линии магнитного поля легко проходят через них, и может создаваться более сильная магнитная сила.
2) Фактический вращающийся двигатель
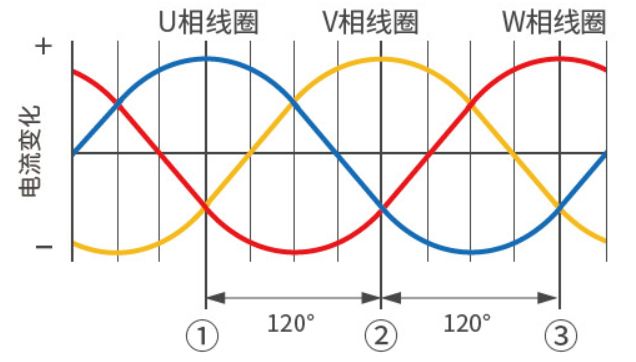
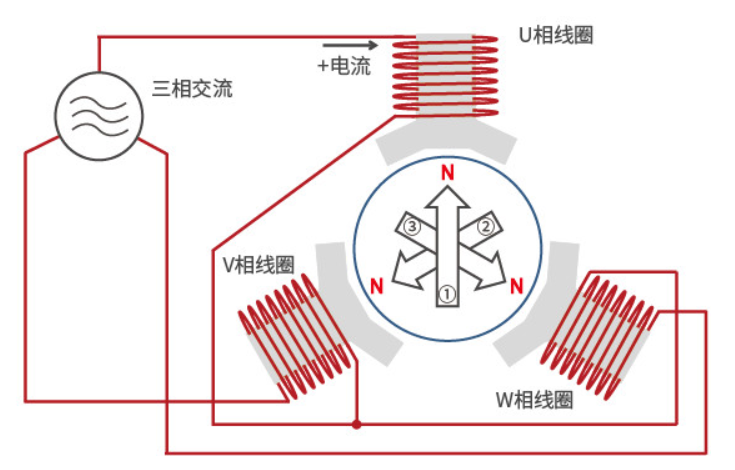
Здесь в качестве практического метода вращения двигателя мы представляем метод создания вращающегося магнитного поля с использованием трехфазного двигателя переменного тока и катушек.
(Трехфазные промышленные двигатели переменного тока представляют собой сигнал переменного тока, разнесенный по фазе на 120°)
Синтетическое магнитное поле в состоянии ① выше соответствует рисунку ① ниже.
Синтетическое магнитное поле в состоянии ② выше соответствует рисунку ② ниже.
Синтетическое магнитное поле в состоянии ③ выше соответствует рисунку ③ ниже.
Как упоминалось выше, катушки намотанного сердечника разделены на три фазы, с конфигурацией интервала 120° из катушек U-фазы, катушек V-фазы и катушек W-фазы, с катушкой с высоким напряжением, создающей N-полюс и катушка с низким напряжением, производящая S-полюс.
Каждая фаза изменяется в соответствии с синусоидальной волной, поэтому полярность (полюс N, полюс S) и его магнитное поле (магнитная сила), создаваемое каждой катушкой, будут меняться.
В это время катушка, которая производит только полюс N, изменяется в последовательности в соответствии с катушкой U-фазы → катушка V-фазы → катушка W-фазы → катушка U-фазы, и, таким образом, происходит вращение.
Структура небольшого двигателя
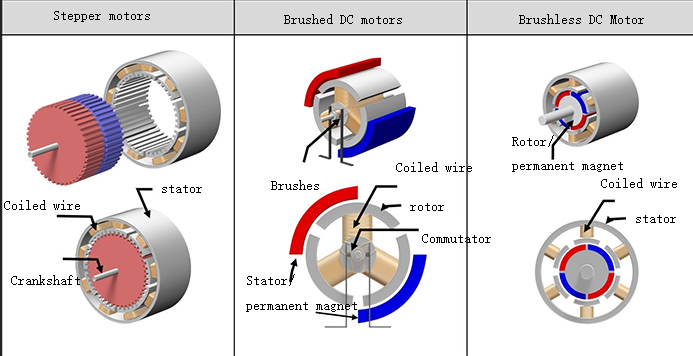
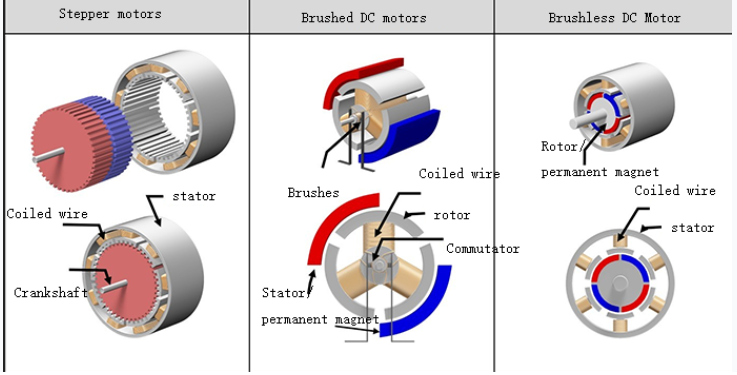
На следующем рисунке показана приблизительная структура и сравнение трех типов промышленных двигателей: шаговые двигатели, коллекторные двигатели постоянного тока (DC) и бесщеточные двигатели постоянного тока (DC).
Основными компонентами этих двигателей в основном являются катушки, магниты и роторы, а также в зависимости от типа существуют типы с фиксированной катушкой и магнитом.
Ниже приводится описание структуры, связанной с иллюстративной диаграммой. Поскольку при более тщательном разделении могут быть и другие структуры, пожалуйста, поймите, что структура, представленная в этой статье, находится под большой рамкой.
Катушка шагового двигателя здесь закреплена с внешней стороны, а магнит вращается с внутренней стороны.
Здесь магнит коллекторного двигателя постоянного тока закреплен с внешней стороны, а катушка вращается с внутренней стороны. Т
Щетки и коммутатор отвечают за подачу питания на катушку и изменение направления тока.
В случае бесщеточного двигателя катушка закреплена снаружи, а магнит вращается внутри.
Структура бесщеточного двигателя отличается, даже если основные компоненты одинаковы из-за разных типов двигателей. Подробности будут объяснены в каждом разделе.
Щеточный двигатель
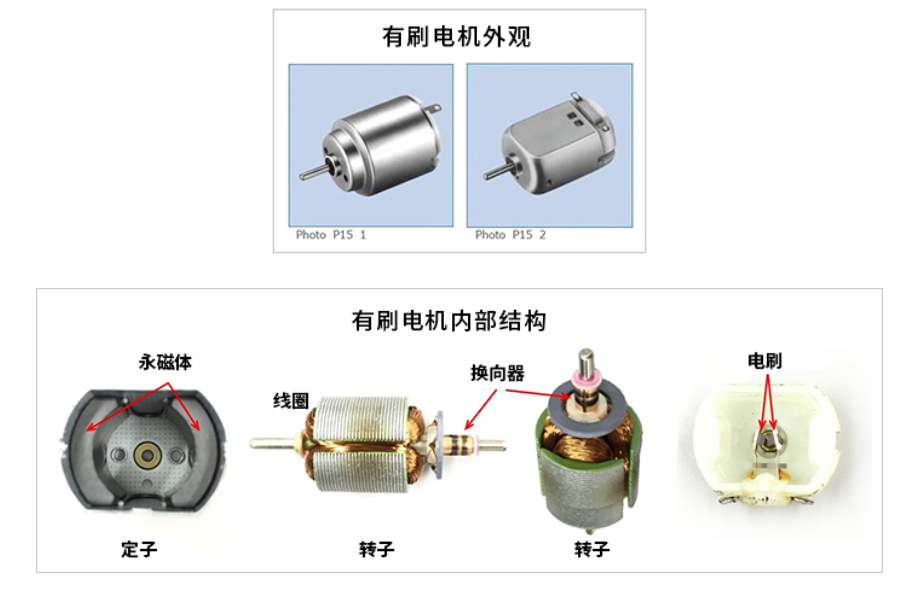
Структура коллекторных двигателей постоянного тока
Ниже представлен внешний вид щеточного двигателя постоянного тока, часто используемого в моделях, и принципиальная схема поломки обычного двигателя двухполюсного (2 магнита) трехщелевого (3 катушки) типа. Возможно, у многих из вас есть опыт разборки электродвигателя постоянного тока и извлечения магнитов.
Вы можете видеть, что постоянные магниты коллекторного двигателя постоянного тока неподвижны, а катушки коллекторного двигателя постоянного тока могут вращаться вокруг внутреннего центра.
The fixed side is called the "stator" and the rotating side is called the "rotor".
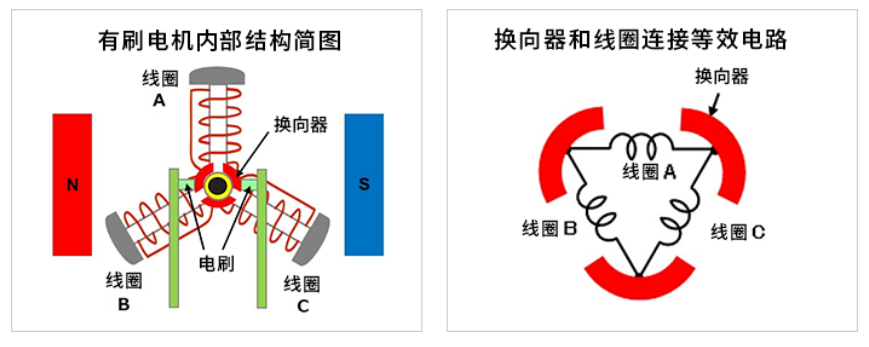
Ниже приведен структурный эскиз, представляющий концепцию структуры.
На периферии вращающейся центральной оси расположены три коммутатора (изогнутые металлические листы для коммутации тока).
Во избежание контакта друг с другом коммутаторы расположены на расстоянии 120° друг от друга (360° ÷ 3 шт.). Коллекторы вращаются вместе с вращением вала.
Один коммутатор подключен к одному концу катушки и другому концу катушки, а три коммутатора и три катушки образуют единое целое (кольцо) в виде сети.
Две щетки закреплены под углами 0° и 180°, чтобы соприкасаться с коллектором.
К щеткам подключен внешний источник постоянного тока, и ток протекает по пути щетка → коммутатор → катушка → щетка.
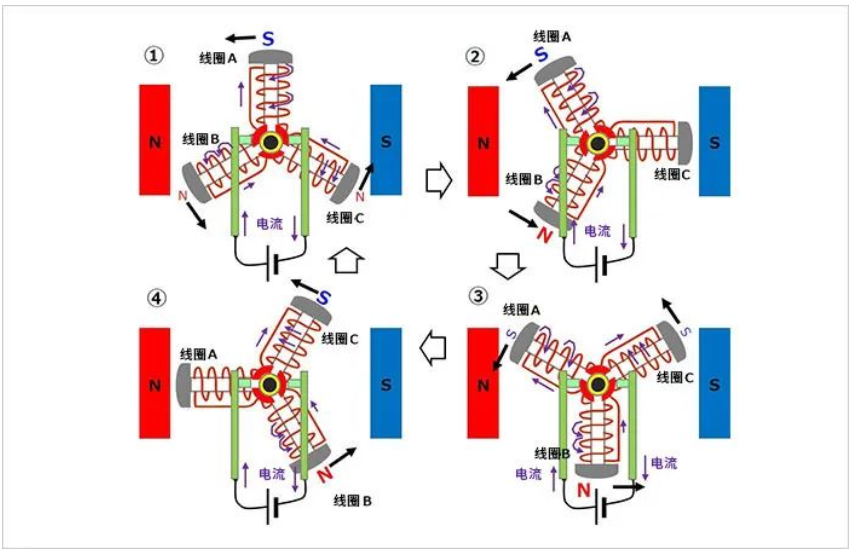
Принцип вращения щеточного двигателя постоянного тока
① Повернуть против часовой стрелки из исходного состояния
Катушка А находится в самой верхней части и подключает питание электроинструмента к щеткам, установите левую сторону как (+), а правую сторону как (-).
Большой ток течет от левой щетки через коммутатор к катушке А.
Это структура, в которой верхняя часть (снаружи) катушки А становится полюсом S.
А так как 1/2 тока от катушки А течет от левой щетки к катушкам В и С в направлении, противоположном катушке А, внешние стороны катушек В и С становятся слабыми N-полюсами (обозначены чуть меньшими буквами в фигура).
Магнитные поля, создаваемые в этих катушках, а также отталкивающие и притягивающие эффекты магнитов заставляют катушки подвергаться силе вращения против часовой стрелки.
② Дальнейшее вращение против часовой стрелки
Далее предположим, что правая щетка находится в контакте с обоими коммутаторами в состоянии, когда катушка А повернута на 30° против часовой стрелки.
Ток катушки А непрерывно течет от левой щетки через правую щетку, и внешняя сторона катушки остается S-полюсной.
Тот же ток, что и в катушке A, протекает через катушку B, и внешняя сторона катушки B становится сильнее N-полюсной.
Поскольку концы катушки С закорочены щетками, ток не течет и магнитное поле не создается.
Даже в этом случае существует вращающая сила против часовой стрелки.
Катушка на верхней стороне от ③ до ④ постоянно подвергается силе, движущейся влево, а нижняя катушка постоянно подвергается силе, движущейся вправо, и продолжает вращаться против часовой стрелки.
Когда катушка поворачивается каждые 30° в сторону ③ и ④, внешняя сторона катушки становится полюсом S, когда катушка находится над центральной горизонтальной осью; когда катушка находится внизу, она становится полюсом N, и движение повторяется.
Другими словами, на верхнюю катушку неоднократно действует сила, движущаяся влево, а на нижнюю катушку неоднократно действует сила, движущаяся вправо (оба против часовой стрелки). Это заставляет ротор вращаться против часовой стрелки все время.
Если питание подключено к противоположным левой щетке (-) и правой щетке (+), магнитное поле создается в катушках обмотки статора в противоположном направлении, поэтому сила, приложенная к катушкам, движется в противоположном направлении и становится вращением по часовой стрелке. .
Кроме того, при отключении питания ротор щеточного двигателя перестает вращаться, потому что он лишен магнитного поля, поддерживающего его вращение.
Трехфазный двухполупериодный бесщеточный двигатель
Внешний вид и устройство трехфазного двухполупериодного бесколлекторного двигателя
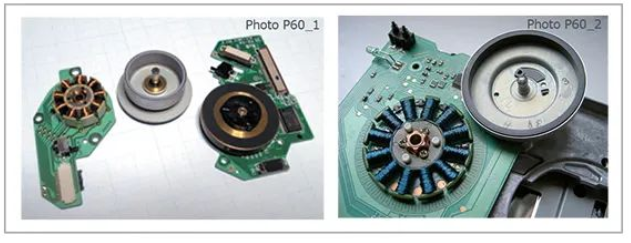
На следующем рисунке показан пример внешнего вида и конструкции бесщеточного двигателя.
Слева показан пример двигателя шпинделя, используемого для вращения диска в устройстве воспроизведения дисков. Имеется 9 катушек трех фаз x 3. Справа пример шпиндельного двигателя для устройства FDD с 12 катушками (трехфазный x 4). Катушки закреплены на плате и намотаны на сердечник.
Дискообразная часть с правой стороны катушек представляет собой ротор с постоянными магнитами. Вал ротора вставлен в центр катушки и охватывает часть катушки, а постоянные магниты окружают периферию катушки.
Внутренняя структура трехфазного двухполупериодного бесщеточного двигателя и эквивалентная схема подключения катушки
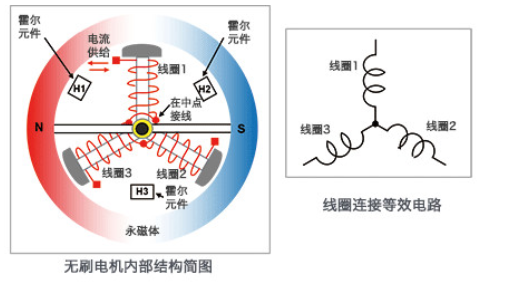
Далее набросок внутренней структуры и эквивалентная схема подключения катушки.
Этот эскиз внутренней структуры является примером 2-полюсного (2 магнита) 3-слотового (3 катушки) двигателя с очень простой конструкцией. Он похож на конструкцию коллекторного двигателя с таким же количеством полюсов и пазов, но сторона катушки фиксирована, а магниты можно вращать. Щеток, конечно, нет.
В этом случае катушки соединены Y-образно, а полупроводниковый элемент используется для подачи тока на катушки, контролируя приток и отток тока в зависимости от положения вращающихся магнитов.
В этом примере элемент Холла используется для определения положения магнита. Элемент Холла устанавливается между катушкой и катушкой для обнаружения генерируемого напряжения и используется в качестве информации о местоположении на основе напряженности магнитного поля. На приведенном ранее изображении двигателя шпинделя FDD вы также можете увидеть элемент Холла, используемый для определения положения между катушкой и катушкой (над катушкой).
Элементы Холла хорошо известны как магнитные датчики.
Он может преобразовывать величину магнитного поля в величину напряжения и указывать направление магнитного поля в положительном или отрицательном выражении.
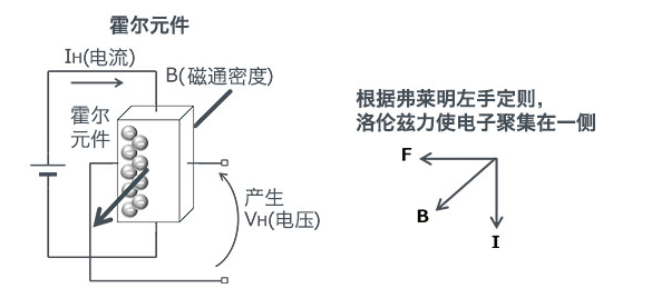
Ниже приведена диаграмма, показывающая эффект Холла.
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
Результирующее напряжение VH выражается следующим уравнением.
Как показывает формула, чем выше ток, тем выше напряжение. Это свойство часто используется для определения положения ротора (магнита).
Принцип вращения трехфазного двухполупериодного бесщеточного двигателя
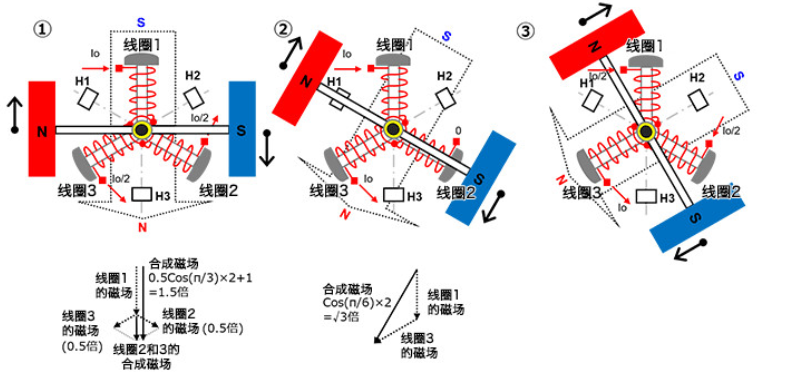
Принцип вращения бесщеточного двигателя будет объяснен в следующих шагах с ① по ⑥. Для простоты понимания постоянный магнит здесь упрощен от круга до прямоугольника.
①
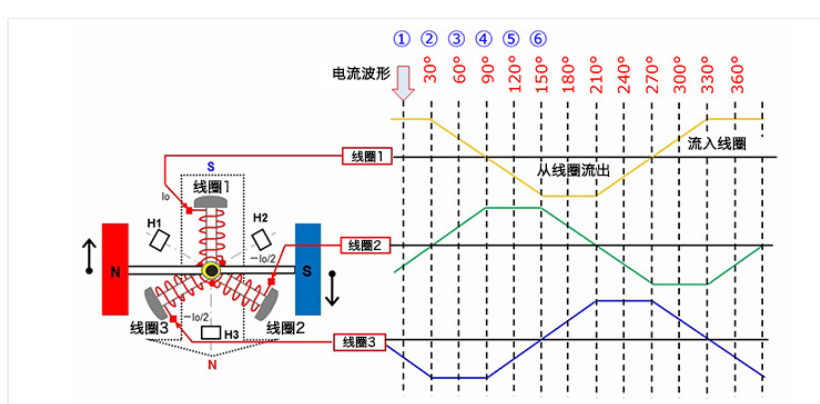
В трехфазной катушке пусть катушка 1 будет зафиксирована на отметке 12 часов, катушка 2 будет зафиксирована на отметке 4 часа, а катушка 3 будет зафиксирована на отметке 8 часов. Пусть N-полюс 2-полюсного постоянного магнита находится слева, а S-полюс справа и вращается.
Заставьте ток Io течь в катушку 1, чтобы создать магнитное поле S-полюса снаружи катушки. Пусть ток Io/2 вытекает из катушки 2 и катушки 3, чтобы создать магнитное поле N-полюса снаружи катушки.
При векторном синтезе магнитных полей катушек 2 и 3 вниз генерируется N-полюсное магнитное поле, которое в 0,5 раза превышает размер магнитного поля, генерируемого при прохождении тока Io через катушку, и становится в 1,5 раза больше, когда добавляется к магнитному полю катушки 1. Это создает синтетическое магнитное поле под углом 90 ° по отношению к постоянному магниту, так что может быть создан максимальный крутящий момент, а постоянный магнит вращается по часовой стрелке.
Когда ток в катушке 2 уменьшается, а ток в катушке 3 увеличивается в соответствии с положением вращения, синтетическое магнитное поле также вращается по часовой стрелке, а постоянный магнит продолжает вращаться.
②
В состоянии, повернутом на 30°, ток Io течет в катушку 1, так что ток в катушке 2 равен нулю, в результате чего ток Io вытекает из катушки 3.
Внешняя сторона катушки 1 становится полюсом S, а внешняя сторона катушки 3 становится полюсом N. Когда вектор синтезирован, создаваемое магнитное поле в √3 (≈1,72) раз превышает магнитное поле, создаваемое при прохождении тока Io через одну катушку. Это также создает синтезированное магнитное поле под углом 90 ° по отношению к магнитному полю постоянного магнита и вращается по часовой стрелке.
Когда входящий ток Io катушки 1 уменьшается в соответствии с положением вращения, входящий ток катушки 2 увеличивается от нуля, а выходной ток катушки 3 увеличивается до Io, синтетическое магнитное поле также вращается по часовой стрелке, а постоянное магнит продолжает вращаться.
Предполагая, что ток в каждой фазе синусоидальный, значение тока здесь равно Io × sin(π⁄3) = Io × √3/2. Путем векторного синтеза магнитного поля общий размер магнитного поля составляет (√3⁄2)2 × 2 = 1,5 магнитного поля, создаваемого одной катушкой. Когда токи в каждой фазе синусоидальны, величина магнитного поля векторного синтеза в 1,5 раза больше магнитного поля, создаваемого одной катушкой, независимо от положения постоянного магнита, а магнитное поле находится под углом 90 ° по отношению к магнитное поле постоянного магнита.
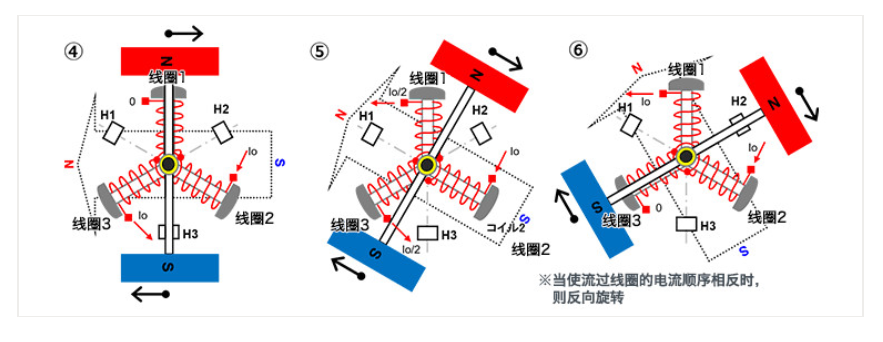
③
В состоянии, когда вращение продолжается на 30°, ток Io/2 течет в катушку 1, ток Io/2 течет в катушку 2, а ток Io течет из катушки 3.
Внешняя сторона катушки 1 становится полюсом S, внешняя сторона катушки 2 также становится полюсом S, а внешняя сторона катушки 3 становится полюсом N. Когда вектор синтезируется, создаваемое магнитное поле в 1,5 раза превышает магнитное поле, создаваемое при протекании тока Io через одну катушку (так же, как ①). Здесь также создается синтетическое магнитное поле под углом 90° по отношению к магнитному полю постоянного магнита и вращается по часовой стрелке.
④~⑥
Поверните так же, как от ① до ③.
Таким образом, если ток, текущий в катушку, постоянно переключается последовательно в соответствии с положением постоянного магнита, постоянный магнит будет вращаться в фиксированном направлении. Аналогично, если ток поменяется на противоположный и направление синтетического магнитного поля изменится, оно будет вращаться против часовой стрелки.
На следующей диаграмме показаны токи в каждой катушке для каждого из этапов ①–⑥, описанных выше, последовательно. Взаимосвязь между текущим изменением и вращением следует понимать из приведенного выше описания.
Шаговые двигатели
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
Структура шагового двигателя (двухфазный биполярный)
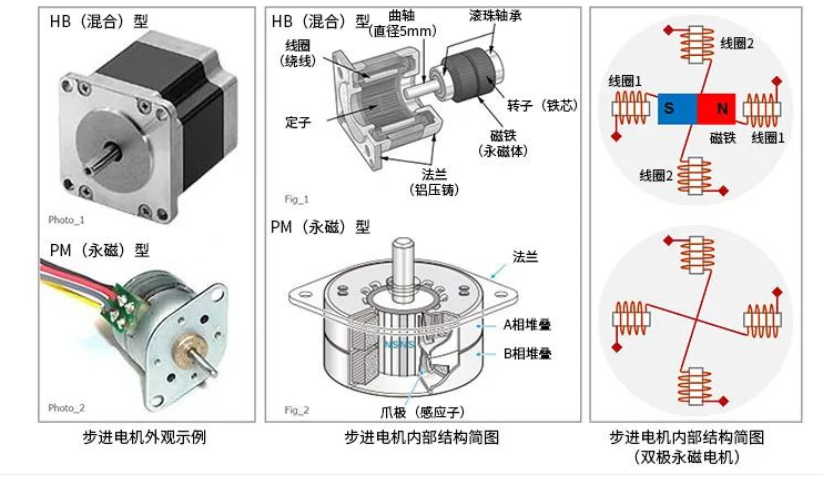
На следующих диаграммах слева направо показан пример внешнего вида шагового двигателя, эскиз внутреннего устройства и эскиз концепции конструкции.
В примере внешнего вида приведен внешний вид шаговых двигателей типа HB (гибридный) и типа PM (постоянный магнит). Структурная диаграмма в середине также приведена для типа HB и типа PM.
Шаговый двигатель представляет собой конструкцию, в которой закреплена катушка, а вращается постоянный магнит. Концептуальная схема внутренней структуры шагового двигателя справа представляет собой пример двигателя с постоянными магнитами, использующего двухфазные (два набора) катушек. В примере базовой структуры шагового двигателя катушки расположены снаружи, а постоянные магниты расположены внутри. Помимо двухфазных катушек, существуют также типы с большим количеством фаз, например трехфазные и пятифазные.
Некоторые шаговые двигатели имеют другую конструкцию, но в этой статье приведена базовая конструкция шагового двигателя, чтобы облегчить представление о принципе его работы. Благодаря этой статье мы надеемся понять базовую структуру шаговых двигателей с фиксированными катушками и вращающимися постоянными магнитами.
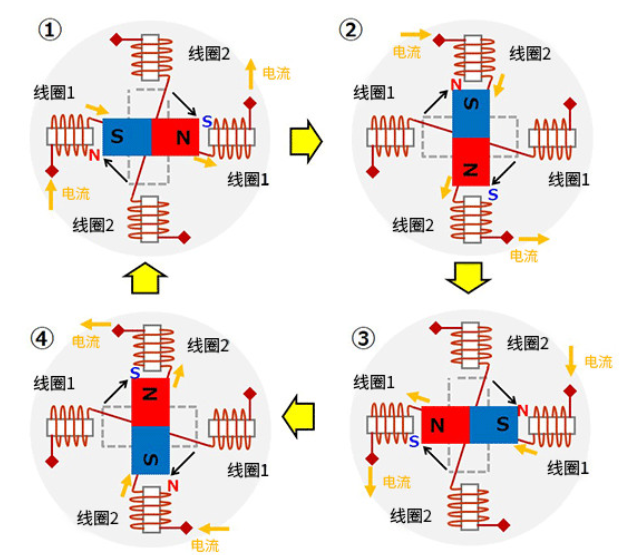
Основной принцип работы шагового двигателя (однофазное возбуждение)
Следующая диаграмма используется для представления основного принципа работы шагового двигателя. Это пример возбуждения для каждой фазы (набора катушек) двухфазных катушек биполярного типа, описанных выше. Предпосылка диаграммы заключается в том, что состояние меняется с ① на ④. Катушки состоят из катушки 1 и катушки 2 соответственно. Кроме того, стрелки тока указывают направление тока.
①
・Проведите ток с левой стороны катушки 1 и наружу с правой стороны катушки 1.
・Не допускайте протекания тока через катушку 2.
・В это время внутренняя сторона левой катушки 1 становится N, а внутренняя сторона правой катушки 1 становится S.
・В результате средний постоянный магнит притягивается магнитным полем катушки 1, меняется на левую сторону S, правую сторону N и останавливается.
②
・Ток катушки 1 прекращается, так что ток втекает с верхней стороны катушки 2 и выходит с нижней стороны катушки 2.
・Внутренняя сторона верхней катушки 2 изменится на N, а внутренняя сторона нижней катушки 2 изменится на S.
・Постоянный магнит притягивается своим магнитным полем и поворачивается на 90° по часовой стрелке, чтобы остановиться.
③
・Ток в катушке 2 прекращается, так что ток втекает с правой стороны катушки 1 и выходит с левой стороны катушки 1.
・Внутренняя сторона левой катушки 1 становится S, а внутренняя сторона правой катушки 1 становится N.
・Постоянный магнит притягивается своим магнитным полем и поворачивается по часовой стрелке еще на 90°, чтобы остановиться.
④
・Остановите ток в катушке 1, чтобы ток втекал с нижней стороны катушки 2 и выходил с верхней стороны катушки 2.
・Внутренняя сторона верхней катушки 2 становится S, а внутренняя сторона нижней катушки 2 становится N.
・Постоянный магнит притягивается своим магнитным полем и поворачивается по часовой стрелке еще на 90°, чтобы остановиться.
Шаговый двигатель можно вращать, переключая ток, протекающий через катушку, с помощью электронной схемы в порядке от ① до ④ выше. В этом примере каждое переключение заставляет шаговый двигатель вращаться на 90°.
Кроме того, когда ток непрерывно протекает через катушку, состояние остановки может поддерживаться, а шаговый двигатель может иметь удерживающий момент. Кстати, если изменить порядок тока, протекающего через катушку, шаговый двигатель можно заставить вращаться в обратном направлении.
Найдите профессионального производителя промышленных двигателей — Dongchun Motor China
 перейти к содержанию
перейти к содержанию