 Ir para o conteúdo
Ir para o conteúdo Qual é a diferença entre um motor sem escovas e um motor com escovas?
Qual é a diferença entre um motor síncrono e um motor assíncrono?
Que tal o motor de indução do rotor bobinado?
Todos os servomotores são motores CA?
Todos os servomotores são motores síncronos?
Os motores de passo pertencem aos motores DC ou aos motores AC?
Um servo motor é um servo motor? ......
Os sábios disseram uma vez: Se o conhecimento não é sistemático, qual é a diferença entre ele e um parágrafo?
Mas o sábio livro sobre aquele texto prolixo, aquela terminologia fantasiosa, aquela explicação plausível, realmente olha para as pessoas nas nuvens.
Também procurei na Internet por muito tempo, não encontrei uma explicação mais sistemática da estrutura dos motores elétricos e do princípio de classificação, então eles se esforçaram muito para consultar e organizar uma cópia.
Este artigo tenta explicar o conhecimento sistemático em linguagem simples e usa muita animação e imagens para expressar vividamente o conhecimento obscuro.
Devido ao meu conhecimento limitado, é inevitável que haja muitos erros, corrija os especialistas, não hesite em dar conselhos.
1. um diagrama para explicar os tipos básicos de motores elétricos

2. Motor elétrico DC - motor de escova
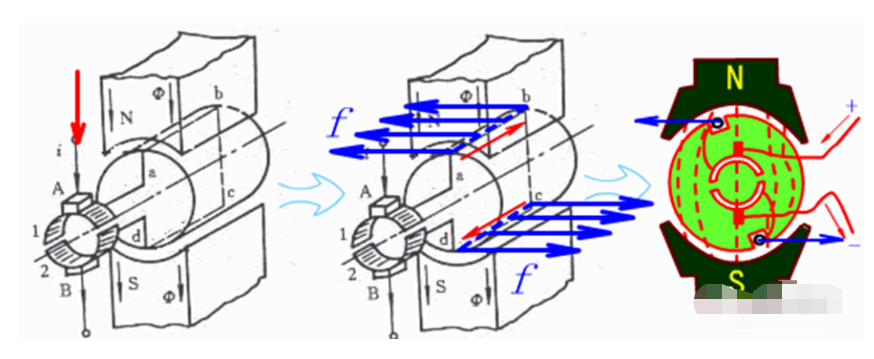
Leia a física da escola secundária da escória do valentão, para estudar o condutor energizado na força do campo magnético daquela coisa, treinamos a mão esquerda em uma palma quebrada, que é exatamente o princípio do motor de indução DC.
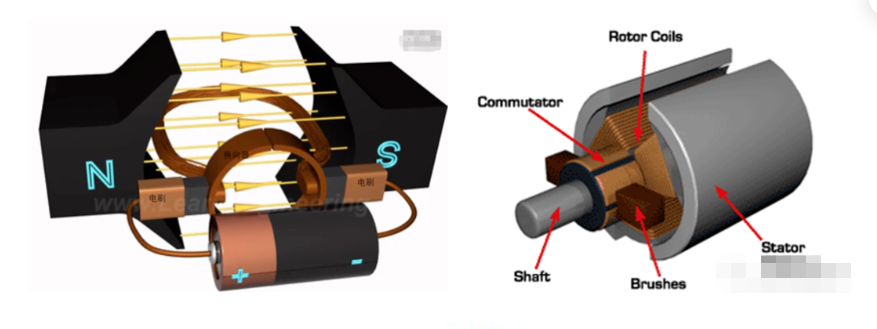
Todos os motores elétricos são compostos de estator e rotor, nos motores elétricos DC, para fazer o rotor girar, você precisa mudar constantemente a direção da corrente, caso contrário, o rotor só pode girar meia volta, é como um pedal de bicicleta .
É por isso que os motores DC precisam de comutadores.
De um modo geral, os motores CC com escovas incluem motores com escovas e motores sem escovas.
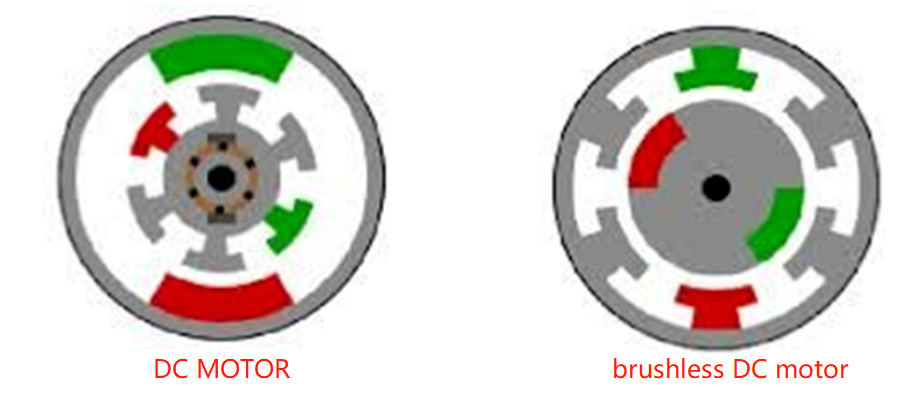
O motor de escova também é chamado de motor de indução CC ou motor de escova de carbono, geralmente chamado de motor CC de escova.
Ele usa comutação mecânica, o pólo externo não move a bobina interna (armadura) em movimento, comutador e bobina do rotor girando juntos, escovas e ímãs não estão se movendo, então o comutador e a fricção da escova completam a comutação da direção atual.
Desvantagens do motor da escova.
1, comutação mecânica de faíscas geradas pelo comutador e fricção da escova, interferência eletromagnética, alto ruído, vida curta.
2, baixa confiabilidade, muitas falhas, exigindo manutenção frequente.
3, devido à presença do comutador, limitando a inércia do rotor, limitando a velocidade máxima, afetando o desempenho dinâmico.
Por ter tantas deficiências, ainda é comumente usado, porque é de alto torque, estrutura simples, fácil manutenção (ou seja, trocar as escovas de carvão), barato.
2. Motores DC - motores sem escova
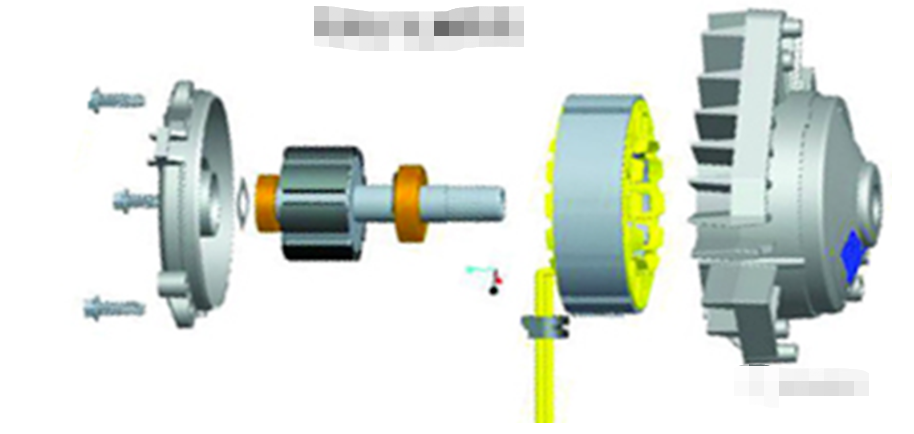
O motor brushless também é chamado de motor inversor DC (BLDC) em alguns campos, ele usa comutação eletrônica (sensor Hall), a bobina (armadura) não move os pólos magnéticos se movem, então o ímã permanente pode estar fora da bobina ou dentro da bobina , portanto, há um motor sem escova de rotor externo e um motor sem escova de rotor interno
Os motores brushless são construídos da mesma forma que os motores síncronos de imã permanente.
No entanto, um único motor brushless não é um sistema de energia completo. Basicamente, o brushless deve ser controlado por um controlador brushless, também conhecido como ESC, para obter uma operação contínua.
É o governador eletrônico brushless (ESC) que realmente determina seu desempenho.
Geralmente, existem dois tipos de correntes de acionamento para motores brushless, uma é uma onda quadrada e a outra é uma onda senoidal.
Às vezes, o primeiro é chamado de motor DC brushless e o último é chamado de servo motor AC, que é exatamente um tipo de servo motor AC.
Os motores sem escova operam de maneiras diferentes e podem ser divididos em motores sem escova de rotor interno e motores sem escova de rotor externo.
O rotor interno é trifásico, o que é mais caro.
O rotor externo é geralmente usado em monofásico, o preço das pessoas, a produção em massa tem estado perto do motor de escova de carbono, então nos últimos anos é amplamente utilizado.
O preço do rotor externo trifásico é próximo ao preço do rotor interno.
Bem, como você pode imaginar, a desvantagem dos motores com escovas é o ponto dos motores sem escovas.
Possui alta eficiência, baixo consumo de energia, baixo ruído, longa vida útil, alta confiabilidade, controle servo, velocidade de conversão de frequência contínua (até uma velocidade muito alta) e outras vantagens.
É relativamente menor que o motor DC com escova, o controle que o motor AC assíncrono é simples, o torque de partida é grande capacidade de sobrecarga, quanto às desvantagens ...... é mais caro que a escova, má manutenção.
2. Motor DC - princípio de controle de velocidade
Regulação da velocidade do motor de indução CC: a chamada regulação da velocidade, ou seja, ajustando a velocidade do motor para obter o torque necessário.
motor dc de ímã permanente ajustando a tensão, resistência em série, alterar a excitação pode ser velocidade, mas o ajuste de tensão real é o mais conveniente e mais comumente usado, o principal uso da regulação de velocidade PWM.
PWM é realmente através do interruptor de alta velocidade para alcançar a regulação da tensão DC, um ciclo, aberto por um longo tempo, a tensão média é alta, desligada por um longo tempo, a tensão média é baixa, muito conveniente para ajustar, desde que o interruptor velocidade Contanto que a velocidade de comutação seja rápida o suficiente, os harmônicos da grade são menores e a corrente é mais contínua.
No entanto, as escovas e o comutador se desgastam por muito tempo e, ao mesmo tempo, há uma grande mudança de corrente durante a comutação, o que é muito fácil de produzir faíscas.
O comutador e as escovas limitam a capacidade e a velocidade do motor de indução CC, o que faz com que a regulação da velocidade do motor de indução CC encontre um gargalo.
Para motor de indução DC sem escova, o controle de velocidade controla apenas a tensão de entrada na superfície.
Mas o sistema de controle de frequência de autocontrole do motor (o próprio motor DC sem escova vem com um detector de posição do rotor e outro dispositivo de aquisição de sinal de posição do rotor, usando o sinal de posição do rotor deste dispositivo para controlar o momento de mudança de fase do dispositivo de controle de frequência de tensão variável) controla automaticamente a frequência de acordo com a tensão variável, que é quase igual ao motor DC (escovado), muito conveniente. Muito conveniente.
Como o rotor usa ímãs permanentes, sem enrolamento de excitação especial, no caso da mesma capacidade, o motor é menor, mais leve, mais eficiente, mais compacto, operação mais confiável, melhor desempenho dinâmico, na condução de veículos elétricos e outros aspectos têm sido amplamente utilizados.
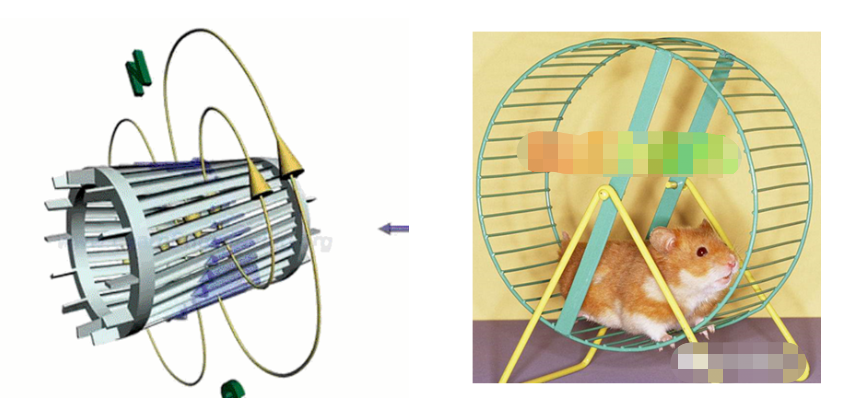
3. Motores CA trifásicos - motores assíncronos
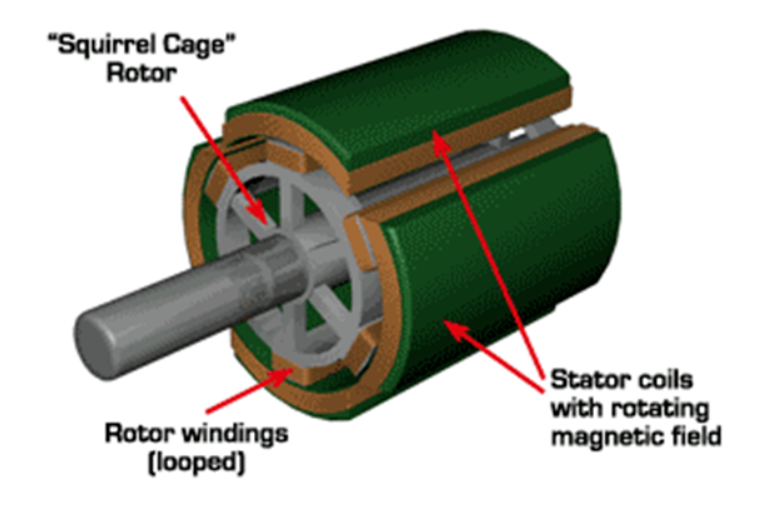
Os motores CA são divididos em motores síncronos e motores assíncronos, os motores síncronos são usados principalmente em geradores e os motores assíncronos são usados principalmente em motores elétricos. Eles são motores de indução de gaiola de esquilo.
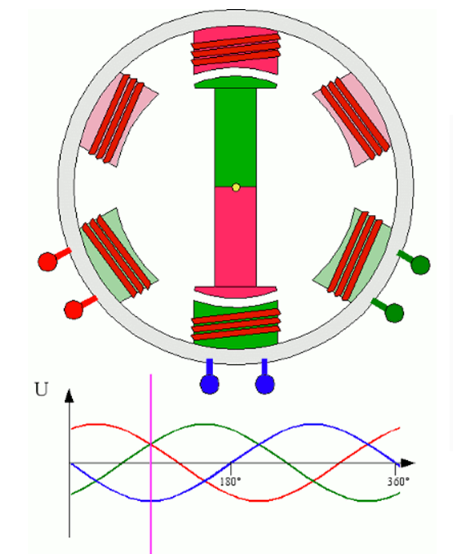
A carcaça do motor é o estator, e há três enrolamentos CA simétricos no estator.
À medida que a sequência das três fases muda, um campo magnético sintético rotativo é formado e a velocidade de rotação do campo magnético é a velocidade síncrona.
A velocidade síncrona n=60f/p, f é a frequência, p é o número de pares de polos, por exemplo, para um motor de 2 polos conectado à rede nacional 50Hz (ou seja, o número de pares de polos é 1 par), então a velocidade n=60*50/1=3000r/min.
Da mesma forma, a velocidade síncrona dos motores de 4 polos, 6 polos e 8 polos é 1500, 1000 e 750.
Os motores assíncronos possuem um mecanismo simples com rotor de bobina fechada, tipo gaiola de esquilo.
A bobina do rotor cortará o campo magnético rotativo para gerar o potencial elétrico induzido, que por sua vez gera a corrente induzida e, finalmente, o campo magnético rotativo.
Para que o rotor se torne um eletroímã e siga a rotação do campo magnético do estator, então a velocidade do rotor deve ser < o campo magnético rotativo do estator, de modo a cortar as linhas de indução magnética.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Ou seja, a velocidade assíncrona do rotor <velocidade síncrona, há uma diferença de velocidade entre o campo magnético do rotor e do estator, por isso é chamado de motor assíncrono.
A velocidade nominal do motor assíncrono varia ligeiramente de fabricante para fabricante, cerca de 2800+r/min para motor de 2 polos, 1400+,950+,700+ para assíncrono de 4 polos, 6 polos e 8 polos.
A velocidade do motor assíncrono é alta quando não há carga e diminui quando há carga.
Motor assíncrono tem estrutura simples, fácil manutenção, operação confiável e preço barato, por isso é amplamente utilizado.
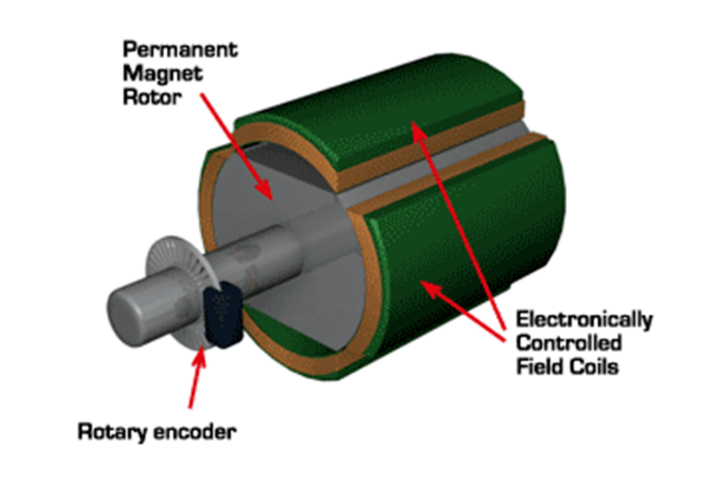
4. Motores CA trifásicos - motores síncronos
Motor síncrono.
Se você deixar a velocidade do rotor = velocidade de rotação do campo magnético do estator, ele se torna um motor síncrono, neste momento é necessário transformar o estator em um eletroímã ou imã permanente, ou seja, para energizar o estator, neste momento não é mais necessário para cortar a linha de indução magnética pode girar, a velocidade de rotação e a velocidade de rotação do campo magnético é a mesma, ou seja, a formação do motor síncrono.
A estrutura do rotor do motor síncrono é mais complexa do que os motores assíncronos, preços altos, na vida útil não é tão amplamente utilizada quanto os motores assíncronos, usados principalmente como geradores, agora usinas termelétricas, usinas hidrelétricas, turbinas a vapor, turbinas hidráulicas são basicamente motores síncronos.
5. Motor CA trifásico - regulação de velocidade de motores elétricos assíncronos
Regulação de velocidade do motor assíncrono: teoricamente, controle de motor assíncrono AC frequência, tensão ou resistência do rotor, distribuição de polo do motor pode ser regulação de velocidade, mas na prática para alcançar regulação de velocidade infinita com o método de ajuste de frequência e tensão para alcançar.
Como a faixa de velocidade de regulação de tensão não é grande, geralmente só pode ser usada em requisitos de controle de velocidade não são ocasiões altas, a aplicação não é difundida.
Regulação de velocidade de frequência variável: Falando em frequência, já devemos ter ouvido falar.
O nome completo da conversão de frequência é Variable Voltage Variable Frequency (VVVF), o que significa que a tensão é alterada quando a frequência é alterada, de modo que a faixa de velocidade do motor assíncrono seja grande o suficiente.
Os conversores de frequência podem ser divididos em duas grandes categorias: conversores de frequência CA-CA e conversores de frequência CA-CC.
Inversor AC-DC: A energia AC é transformada diretamente em energia AC de outra frequência pela eletrônica de potência.
A frequência máxima de saída não pode exceder a metade da frequência de entrada, por isso geralmente é usada apenas em sistemas de baixa velocidade e alta capacidade e pode eliminar a necessidade de um grande redutor de engrenagem.
O inversor AC-DC retificará a energia AC em DC primeiro e depois a transformará em AC com frequência e tensão controláveis através do inversor, com tecnologia PWM, este tipo de inversor pode realizar uma ampla gama de tensão e frequência variáveis.
Para veículos elétricos, o motor assíncrono é durável, forte capacidade de sobrecarga e o algoritmo de controle é tão maduro que pode ser usado completamente.
6. Motor CA trifásico - regulação de velocidade do motor síncrono
Regulação da velocidade do motor síncrono:
As máquinas síncronas não têm taxa de redução e a tensão de controle não pode alterar a velocidade quando a estrutura é determinada; portanto, antes do aparecimento dos conversores de frequência, os motores síncronos eram completamente desregulados.
A aparência do conversor de frequência faz com que o motor síncrono CA também tenha uma enorme faixa de regulação de velocidade, porque seu rotor também possui excitação independente (ímã permanente ou excitação elétrica), sua faixa de regulação de velocidade é mais ampla que a do motor assíncrono e o motor síncrono possui foi dada uma nova vida.
O sistema de controle de velocidade de frequência variável de tensão variável do motor síncrono pode ser dividido em outro controle de velocidade variável controlado e controle de velocidade variável autocontrolado.
Para outra regulação de velocidade de frequência variável controlada, é semelhante à regulação de frequência variável do motor assíncrono, que pode ser controlado por SVPWM e outros métodos de controle de acordo com seu modelo matemático, e seu desempenho é melhor do que o do motor assíncrono CA comum.
Motor síncrono inversor autocontrolado costumava ter uma variedade de nomes no processo de desenvolvimento, como motor sem comutador; ao usar ímãs permanentes e inserir onda senoidal trifásica, pode ser chamado de motor síncrono de ímã permanente de onda senoidal; e se inserir onda quadrada, então pode ser chamado de motor síncrono de ímã permanente de onda trapezoidal, sim, é semelhante à máquina DC sem escova (BLDM) mencionada anteriormente, não estamos sentindo que um grande círculo de rap girou Volte, mas você agora deve ter uma compreensão mais profunda da velocidade variável, portanto, motor DC sem escova ao usar entrada DC, mas o uso da tecnologia de conversão de frequência do motor síncrono (a mesma estrutura do motor síncrono de ímã permanente), no Modelo3 sobre o uso de motor DC sem escova .
7. Motor assíncrono CA monofásico - motor excitado em série CA monofásico (escova)
Motor monofásico excitado em série AC, comumente conhecido como motor excitado em série ou motor universal (nome estrangeiro UniversalMotor, nomeado por causa de AC e DC universal), o enrolamento de armadura e o enrolamento de excitação são conectados em série para trabalharem juntos.
O motor excitado em série monofásico também é chamado de motor excitado em série AC-DC de uso duplo, que pode funcionar com energia CA ou CC.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
As vantagens do motor monofásico excitado em série são que ele possui alta velocidade, alto torque de partida, tamanho pequeno, peso leve, não é fácil bloquear a rotação, ampla faixa de tensão aplicável e pode ser regulado em velocidade pelo método de regulação de tensão , que é simples e fácil de realizar.
Portanto, é amplamente utilizado em ferramentas elétricas, como rebarbadora, furadeira manual, etc.
A estrutura do motor monofásico excitado em série é muito semelhante à do motor DC excitado em série, a principal diferença é que o núcleo do estator do motor monofásico excitado em série deve ser feito de aço silício laminado, enquanto os pólos magnéticos de DC pode ser feito de estrutura laminada e integral.
A regulação da velocidade do motor monofásico excitado em série, a maioria dos métodos usados para ajustar a tensão, é alterar o potencial elétrico.
O método de regulação de tensão do motor excitado em série monofásico usa regulação de tensão de mudança de fase controlada, que usa a tensão de disparo do SCR para ficar atrás da tensão de entrada para alcançar o gatilho de mudança de fase da tensão de entrada.
Existem métodos de hardware e software na implementação.
O método de tensão regulada, usando tecnologia de controle de velocidade controlada por silício, possui uma linha simples, tamanho pequeno de componentes e outras características de um método simples e eficaz controlado por silício
(a) Curva de variação da corrente CA;
(b) Sentido de rotação do rotor quando a corrente é de meia onda positiva
(c) Sentido de rotação do rotor quando a corrente é de meia onda negativa

8. Motor assíncrono CA monofásico - motor CA monofásico de gaiola de esquilo (sem escova)
A corrente monofásica através do enrolamento da armadura produz um campo magnético pulsante em vez de um campo magnético rotativo, de modo que os motores assíncronos monofásicos não podem ser iniciados automaticamente.
Para resolver o problema de partida, os motores assíncronos monofásicos alimentados por CA são frequentemente fabricados para serem bifásicos.
O enrolamento principal é alimentado diretamente pela fonte de alimentação monofásica; o enrolamento secundário é espacialmente diferente do enrolamento principal em 90° (ângulo elétrico, igual ao ângulo mecânico dividido pelo número de pares de pólos do motor).
O enrolamento secundário é conectado à fonte de alimentação CA monofásica após a conexão em série do capacitor ou resistor, de modo que a corrente que passa por ele e a corrente no enrolamento principal tenham uma certa diferença de fase.
Isso torna o campo magnético sintético um campo rotativo elíptico, ou talvez até próximo de um campo rotativo circular.
O motor obtém assim o torque de partida.
O motor que usa o método de separação de fase por resistência é barato, por exemplo, o enrolamento secundário pode ser enrolado com um fio mais fino, mas o efeito de separação de fase é ruim e a energia é consumida na resistência.
Depois que o motor liga e atinge uma certa velocidade, o enrolamento secundário geralmente é removido automaticamente por uma chave centrífuga montada no eixo do motor para reduzir as perdas resistivas e melhorar a eficiência operacional.
Geralmente é usado para ocasiões em que o requisito de torque de partida não é alto, como torno pequeno, refrigerador pequeno, etc. A desvantagem é que a velocidade não pode ser ajustada.
É possível aproximar o campo magnético sintético do motor do campo magnético giratório circular em um determinado ponto de trabalho do motor, de forma a obter melhores características de trabalho.
Para que o motor assíncrono bifásico obtenha melhor desempenho de partida ou melhores características de operação ou ambos, a capacitância (quantidade de valor) necessária é diferente e pode ser dividida em três tipos
9. motores de passo - motores de passo de malha aberta
Os motores de passo (circuito aberto) são motores controlados por circuito aberto que convertem sinais de pulso elétrico em deslocamentos angulares e são amplamente utilizados.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
O número de pulsos pode ser controlado para controlar a quantidade de deslocamento angular, de modo a atingir o objetivo de posicionamento preciso; ao mesmo tempo, a frequência do pulso pode ser controlada para controlar a velocidade e a aceleração da rotação do motor, de modo a atingir o objetivo de regulação da velocidade.
O motor de passo é um tipo de motor de indução, que funciona usando um circuito eletrônico, ou seja, um driver, para transformar a energia CC em uma corrente de controle de temporização multifásica alimentada por compartilhamento de tempo.
Embora os motores de passo sejam alimentados por corrente CC, eles não podem ser entendidos como motores CC, que são motores de potência que convertem energia elétrica CC em energia mecânica, enquanto os motores de passo são motores de controle de malha aberta que convertem sinais de pulso elétrico em deslocamento angular.
10. Motor de passo - comparação de servo de passo
Observe que os motores de passo são usados em aplicações de baixa velocidade - não mais que 1.000 r/min por minuto, a melhor faixa de trabalho é 150 ~ 500 r/min (aumentando em malha fechada até 1.500).
O motor de passo bifásico a 60 ~ 70r/min é propenso ao fenômeno de ressonância de baixa velocidade, gerando vibração e ruído, que precisa ser evitado alterando a taxa de redução, aumentando a fração fina, adicionando amortecedores magnéticos, etc.
Precauções de precisão de subdivisão, quando o nível de subdivisão é maior que 4, a precisão do ângulo de passo não pode ser garantida, requisitos de alta precisão, é melhor mudar para mais fases (ou seja, ângulo de passo menor) do motor de passo ou fechado- passo de loop, servo motor.
Motor de passo (loop aberto) e servo motor 7 diferentes.
Uma precisão de controle - a precisão do controle do servo motor pode ser definida de acordo com o codificador, maior precisão.
B características de baixa frequência - os motores de passo são propensos a vibrações em baixas frequências, os servomotores não.
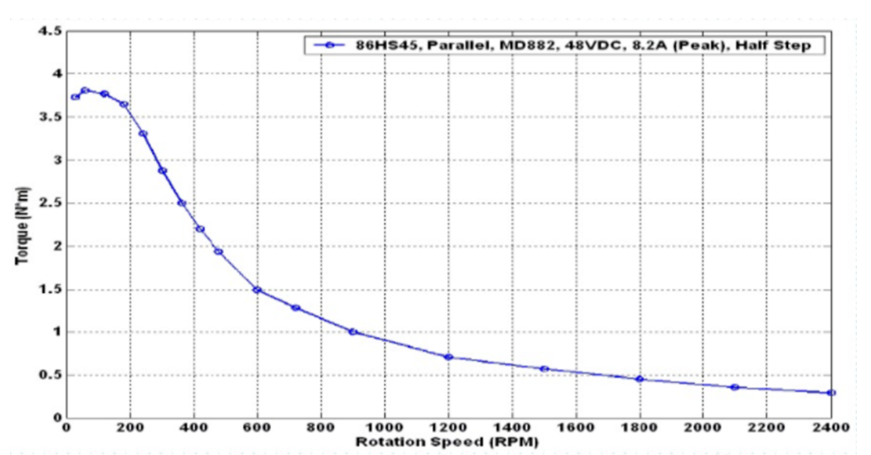
Características momento-frequência C - o torque do motor de passo torna-se menor com o aumento da velocidade, de modo que sua velocidade máxima de operação geralmente está em <1000 r/min, servo motor na velocidade nominal (geralmente 3000 r/min) pode produzir o torque nominal, na velocidade nominal acima da saída de potência constante, a velocidade máxima de até 5000 r/min;.
Capacidade de sobrecarga D - o motor de passo não pode ser sobrecarregado, o torque máximo do servo motor pode ser sobrecarregado 3 vezes.
Desempenho operacional E - motor de passo para controle de malha aberta, servo motor para controle de malha fechada.
Resposta de velocidade F - tempo de inicialização do motor de passo 0,15 ~ 0,5s, servo motor 0,05 ~ 0,1, o mais rápido 0,01s para atingir a classificação de 3000r / min.
Indicadores de eficiência G - eficiência do motor de passo de cerca de 60%, servo motor de cerca de 80%.
No uso real encontrará: servo motor caro, caro entre muitos, então motores síncronos são mais amplamente utilizados, especialmente nos requisitos de precisão de posicionamento não são acionamento por correia síncrona muito alta, transportador de correia plana e outras ocasiões costumam usar motor de passo.
11. Motores de passo - motores de passo de malha fechada
Motores de passo de malha fechada: Além dos motores de passo de malha aberta, existem motores de passo que possuem um codificador adicionado na extremidade do motor, permitindo o controle de malha fechada.
O controle de malha fechada de motores de passo usa feedback de posição e/ou feedback de velocidade para determinar transições de fase apropriadas à posição do rotor, o que pode melhorar significativamente o desempenho dos motores de passo.
Servosistemas sem fenômenos de perda de sincronismo.
Vantagens dos motores de passo em malha fechada.
1. Resposta de alta velocidade. Comparado aos motores adequados, o passo a passo de malha fechada possui um seguimento muito forte dos comandos de posicionamento, portanto o tempo de posicionamento é muito curto. Na aplicação de partidas/paradas frequentes, o tempo de posicionamento pode ser significativamente reduzido.
2. Gere mais torque do que o servo comum. Compense a falta de perda de passo e vibração de baixa velocidade do sistema de passo comum.
3. Alto torque pode ser gerado mesmo sob carga de 100%, sem perda de operação de passo, sem considerar perda de torque e outros problemas como sistemas de passo comuns.
4. Ao aplicar a unidade de circuito fechado, a eficiência pode ser aumentada para 7,8 vezes, a potência de saída pode ser aumentada para 3,3 vezes e a velocidade pode ser aumentada para 3,6 vezes.
Ele pode obter maior velocidade de operação, velocidade mais estável e suave do que o controle de malha aberta.
5. O motor de passo ficará completamente estacionário quando parar, sem o fenômeno de microvibração do servo comum.
Ele pode substituir a aplicação de sistema servo de uso geral quando é necessário posicionamento de baixo custo e alta precisão.
12. motor de passo - comparação de servo de circuito fechado de passo
Os motores de passo de circuito fechado ajustam automaticamente o tamanho da corrente do enrolamento de acordo com o tamanho da carga, o calor e a vibração são menores que os motores de passo de circuito aberto, há feedback do codificador para que a precisão seja maior do que os motores de passo comuns, a resposta do motor é maior que a de circuito aberto passo mais lento do que servo motores mais rápido, há um erro de posição durante a operação, o erro diminuirá gradualmente em milissegundos após a parada do comando.
Torque de alta velocidade do que o passo a passo de malha aberta, aplicações comuns na ocasião de 0-1500 rpm.
Em resumo: motor de passo de circuito fechado com baixo custo, alta eficiência, sem jitter, sem microvibração de parada, alta rigidez, sem retificação, alta velocidade, alta resposta dinâmica, etc., é a substituição de sistemas servo de alto custo, sistemas de passo de circuito aberto de baixo custo e outras soluções econômicas
13. Servo motor - Servo motor geral
O servo motor (servo motor), também chamado de motor atuador, pode tornar a velocidade de controle e a precisão da posição muito precisas, pode converter o sinal de tensão em torque e velocidade para acionar o objeto de controle.
Ao contrário da estrutura principal do motor de passo, o servo motor é um motor CC padrão ou motor de indução CA porque o circuito de controle é colocado fora do motor e a parte do motor dentro.
O servo motor depende de pulsos para posicionamento. Quando o servo motor recebe 1 pulso, ele gira em um ângulo correspondente a 1 pulso.
Cada vez que o motor gira um ângulo, o codificador enviará o número correspondente de pulsos de feedback. Os pulsos de feedback e os pulsos recebidos pelo servo driver formam um controle de malha fechada, de modo que o servo driver pode controlar a rotação do motor com muita precisão para obter um posicionamento preciso.
Controle de servo motor: Geralmente, os servo motores para uso industrial são controlados por três circuitos, ou seja, circuito de corrente, circuito de velocidade e circuito de posição, que podem realimentar a aceleração angular, velocidade angular e posição rotacional da operação do motor, respectivamente.
O chip controla a corrente de acionamento de cada fase do motor por meio do feedback das três, para que a velocidade e a posição do motor possam funcionar com precisão conforme programado.
O servo AC tem a característica de torque constante sob a velocidade nominal, comum 200W, 400W de inércia baixa e média, a velocidade nominal do servo AC é 3000rpm, a velocidade mais alta é 5000rpm, alta velocidade.
O torque é proporcional à corrente, podendo trabalhar no modo torque, como travamento de parafusos, prensagem de terminais e outras ocasiões que necessitem de torque constante.
O ruído e a vibração do servo AC são muito pequenos e com baixa geração de calor.
O mesmo volume de inércia do motor, a inércia do rotor é pequena, a inércia do servo de 400W é equivalente apenas à inércia do rotor do motor de passo de 57 bases de 2NM.
O servo possui capacidade de sobrecarga de curto período, a seleção precisa considerar o multiplicador de sobrecarga do motor na aceleração e desaceleração.
O servo usa controle de malha fechada e tem o mesmo erro de rastreamento de posição que um stepper de malha fechada.
Servo requer comissionamento antes do uso.
O torque original do motor de passo e do servo motor não é suficiente, muitas vezes é necessário trabalhar com o redutor, pode-se usar o conjunto de engrenagens de redução ou redutor planetário.
6. Servo motor - servo
Servo é uma classe de servo motor DC, usado inicialmente para pequenos modelos de aviões e agora usado para pequenas juntas de robôs.
A partir da análise estrutural, um servo consiste em um pequeno motor CC, além de sensores, chips de controle e conjuntos de engrenagens de redução, que são montados em uma carcaça integrada.
É capaz de controlar o ângulo de rotação através de um sinal de entrada (geralmente um sinal PWM, mas também um sinal digital).
Por ser uma versão simplificada, o controle original de três malhas do servo motor é simplificado para uma malha, ou seja, apenas a malha de posição é detectada.
Uma solução barata é um potenciômetro, que é detectado por um resistor, enquanto uma solução avançada usará um sensor Hall ou um codificador.
Servos gerais são baratos e compactos, mas têm precisão muito baixa e baixa capacidade de calma de posição, e podem atender a muitas necessidades de baixo custo.
Com o boom de pequenos robôs de consumo nos últimos dois anos, servos pequenos e leves tornaram-se instantaneamente os componentes de junta mais adequados.
No entanto, as juntas robóticas exigem um desempenho muito superior aos servos aéreos e, como produto comercial, também exigem servos de qualidade muito superior aos dos tocadores DIY.
Bem-vindo a compartilhar conosco mais informações sobre motores elétricos na área de comentários!
Qualquer dúvida sobre motor elétrico, entre em contato com o motor elétrico profissional fabricante em China do seguinte modo:

A Dongchun motor possui uma ampla gama de motores elétricos que são usados em vários setores, como transporte, infraestrutura e construção.
Obtenha uma resposta imediata.






