Bijna de helft van het energieverbruik in de wereld wordt verbruikt door elektromotoren, dus het hoge rendement van elektromotoren zou de meest effectieve maatregel zijn bij het oplossen van de energieproblemen in de wereld.
In het algemeen verwijst het naar de transformatie van de kracht die wordt gegenereerd door de stroom van stroom in een magnetisch veld in een roterende actie, en in een breed bereik omvat het ook lineaire actie.
Afhankelijk van het type voeding dat wordt gebruikt om de motor aan te drijven, zijn er gelijkstroommotoren en AC-elektromotoren.
En volgens het motorrotatieprincipe kan het grofweg in de volgende categorieën worden verdeeld. (Behalve speciale motoren)
DC-elektromotor/DC-motoren (gelijkstroom).
Geborstelde motoren
De veelgebruikte borstelmotoren worden over het algemeen DC-elektromotoren genoemd.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Borstelloze gelijkstroommotor
Borstelloze gelijkstroommotoren gebruiken geen borstels of commutatoren, maar gebruiken een schakelfunctie zoals een transistor om de stroom te schakelen en een roterende actie uit te voeren.
Stappenmotor.
Deze motor werkt synchroon met pulsvermogen en wordt daarom ook wel pulsinductiemotor genoemd.
Het wordt gekenmerkt door het vermogen om eenvoudig een nauwkeurige positionering te bereiken.
AC-motoren
Asynchrone motor
Wisselstroom genereert een roterend magnetisch veld in de stator, dat op zijn beurt een geïnduceerde stroom in de rotor genereert, in wiens interactie rotatie optreedt voor de ac-inductiemotor.
Synchrone motor
Wisselstroom creëert een roterend magnetisch veld en de rotor met magnetische polen roteert als gevolg van de aantrekkingskracht.
-De rotatiesnelheid is gelukkig gesynchroniseerd met de frequentie van de stroomvoorziening.
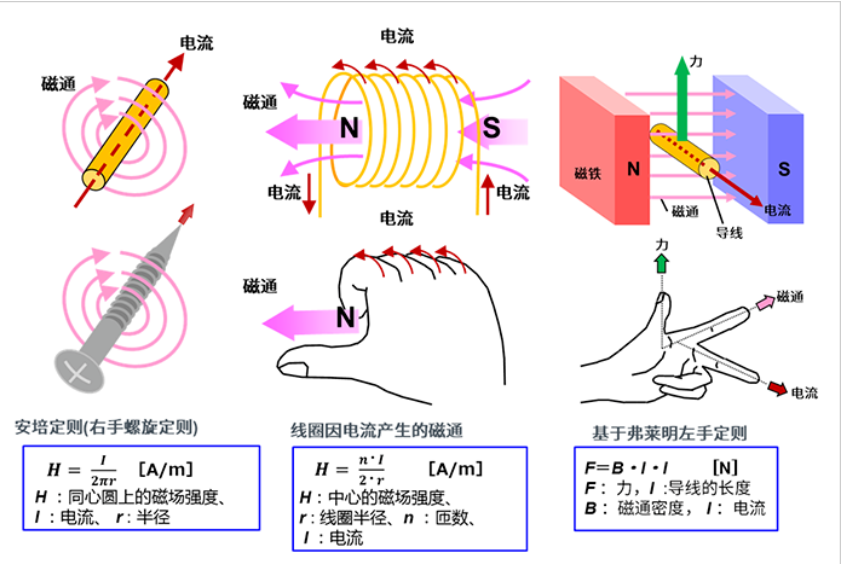
Over stromingen, magnetische velden en krachten
Laten we eerst, ter wille van de daaropvolgende verklaringen van de motorprincipes, de basiswetten/wetten met betrekking tot stroom, magnetisch veld en kracht bekijken.
Hoewel er een gevoel van nostalgie heerst, is het gemakkelijk om deze kennis te vergeten als je normaal gesproken geen magnetische componenten gebruikt
We combineren afbeeldingen en formules ter illustratie.
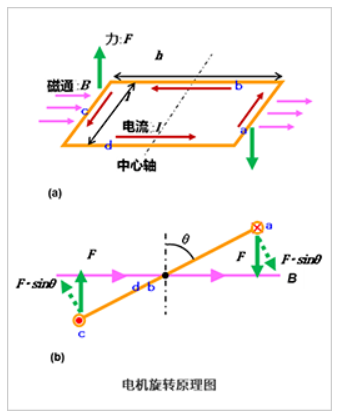
Wanneer het draadframe rechthoekig is, wordt rekening gehouden met de kracht die op de stroom inwerkt.
De kracht F die op de delen van zijden a en c inwerkt, is
Het koppel wordt gegenereerd met de centrale as als centrale as.
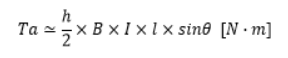
Als we bijvoorbeeld een toestand beschouwen waarin de rotatiehoek slechts θ is, is de kracht die loodrecht op b en d werkt sinθ, dus het koppel Ta van het a-onderdeel wordt gegeven door:
Als we op dezelfde manier deel c beschouwen, wordt het koppel verdubbeld en ontstaat het koppel dat wordt berekend met de volgende vergelijking
Omdat de oppervlakte van de rechthoek S = h・l is, geeft het vervangen ervan in de bovenstaande vergelijking het volgende resultaat.
De formule is niet alleen van toepassing op rechthoeken, maar ook op andere veel voorkomende vormen zoals cirkels. De motor maakt gebruik van dit principe.
Hoe draait een elektromotor?
1) De inductiemotoren roteren met behulp van magneten en magnetische kracht
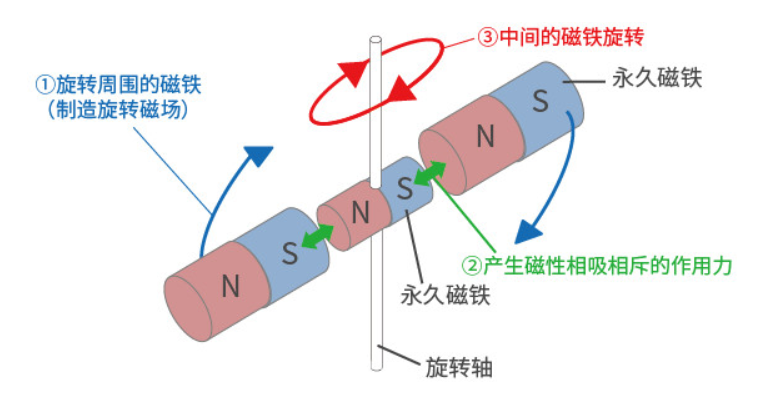
Rond een permanente magneet met een roterende as,
① de magneet wordt gedraaid (zodat er een roterend magnetisch veld ontstaat),
② dan volgens het principe dat N- en S-polen elkaar op verschillende polen aantrekken en elkaar op hetzelfde niveau afstoten,
③ de magneet met een roterende as zal roteren.
Dit is het basisprincipe van de rotatie van wisselstroommotoren.
De stroom die in de geleider vloeit, veroorzaakt een roterend magnetisch veld (magnetische kracht) eromheen en daardoor roteert de magneet, wat praktisch dezelfde werkingstoestand is als deze.
Wanneer de draad in de vorm van een spoel wordt gewikkeld, wordt bovendien de magnetische kracht gesynthetiseerd, waardoor een grote magnetische veldflux (flux) ontstaat die N- en S-polen produceert.
Bovendien kunnen, door een ijzeren kern in de spoelachtige draad te steken, de magnetische krachtlijnen gemakkelijk worden doorgelaten en kan een sterkere magnetische kracht worden gegenereerd.
2) Werkelijke roterende motor
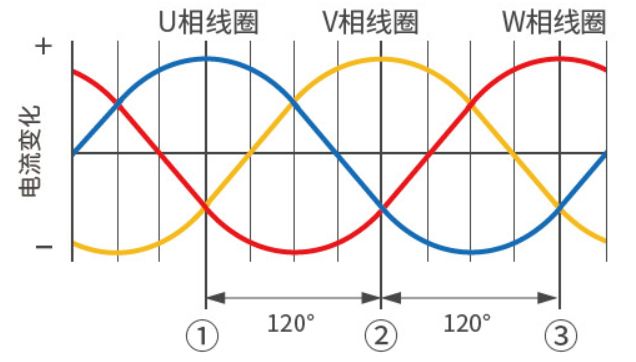
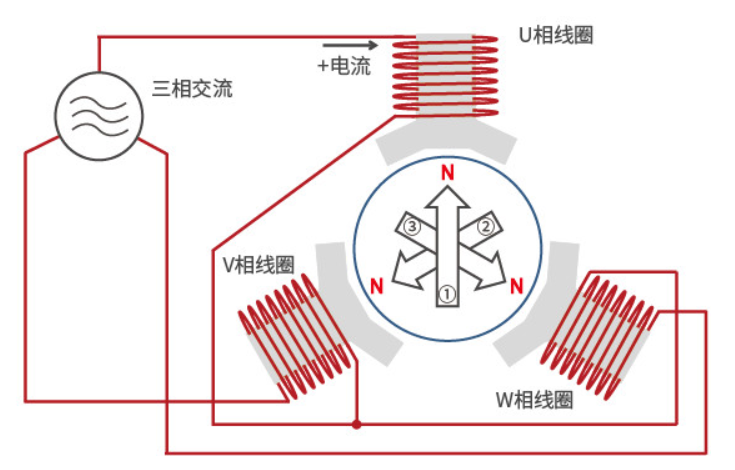
Hier introduceren we, als praktische methode voor het draaien van de motor, de methode voor het creëren van een roterend magnetisch veld met behulp van een driefasige wisselstroommotor en spoelen.
(Driefasige industriële AC-motoren zijn een AC-signaal met een onderlinge afstand van 120° in fase)
Het synthetische magnetische veld in de toestand ① hierboven komt overeen met figuur ① hieronder.
Het synthetische magnetische veld in de toestand ② hierboven komt overeen met figuur ② hieronder.
Het synthetische magnetische veld in de toestand ③ hierboven komt overeen met figuur ③ hieronder.
Zoals hierboven vermeld, zijn de spoelen van de gewikkelde kern verdeeld in drie fasen, met een intervalconfiguratie van 120 ° van U-fasespoelen, V-fasespoelen en W-fasespoelen, waarbij de spoel met hoogspanning een N-pool produceert en de spoel met laagspanning producerende S-pool.
Elke fase verandert volgens een sinusgolf, dus de polariteit (N-pool, S-pool) en het magnetische veld (magnetische kracht) dat door elke spoel wordt gegenereerd, zullen veranderen.
Op dit moment verandert de spoel die alleen de N-pool produceert in volgorde volgens de U-fasespoel → V-fasespoel → W-fasespoel → U-fasespoel, en dus vindt rotatie plaats.
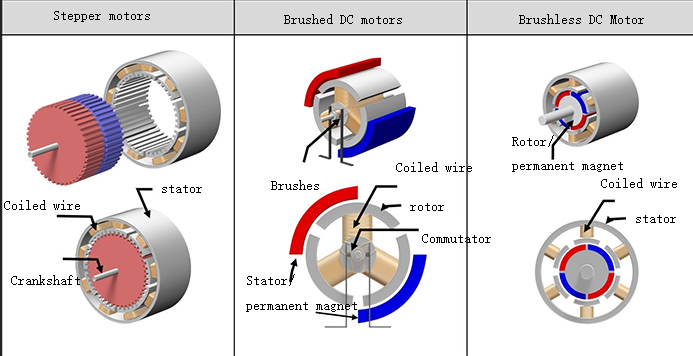
Structuur van een kleine motor
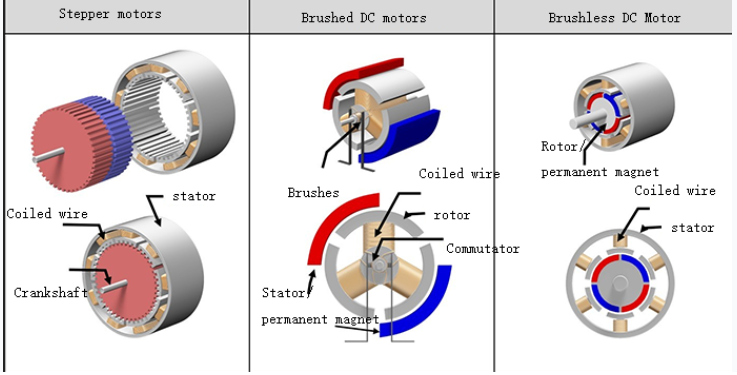
De volgende afbeelding geeft bij benadering de structuur en vergelijking weer van drie typen industriële motoren: stappenmotoren, geborstelde DC (DC)-motoren en borstelloze DC (DC)-motoren.
De basiscomponenten van deze motoren zijn voornamelijk spoelen, magneten en rotoren, en afhankelijk van het type zijn er ook spoelvaste en magneetvaste typen.
Het volgende is een beschrijving van de structuur die bij het voorbeelddiagram hoort. Aangezien er mogelijk andere structuren kunnen zijn als deze zorgvuldiger worden verdeeld, verzoeken wij u er begrip voor te hebben dat de structuur die in dit artikel wordt gepresenteerd zich in een groot kader bevindt.
De spoel van de stappenmotor zit hier aan de buitenkant vast en de magneet wordt aan de binnenkant gedraaid.
Hierbij is de magneet van de geborstelde gelijkstroommotor aan de buitenkant bevestigd en draait de spoel aan de binnenkant. T
De borstels en commutator zijn verantwoordelijk voor het leveren van stroom aan de spoel en het veranderen van de richting van de stroom.
Bij een borstelloze motor zit de spoel aan de buitenkant vast en draait de magneet aan de binnenkant.
De structuur van een borstelloze motor is anders, ook al zijn de basiscomponenten hetzelfde vanwege de verschillende soorten motoren. De details worden in elke sectie uitgelegd.
Borstelmotor
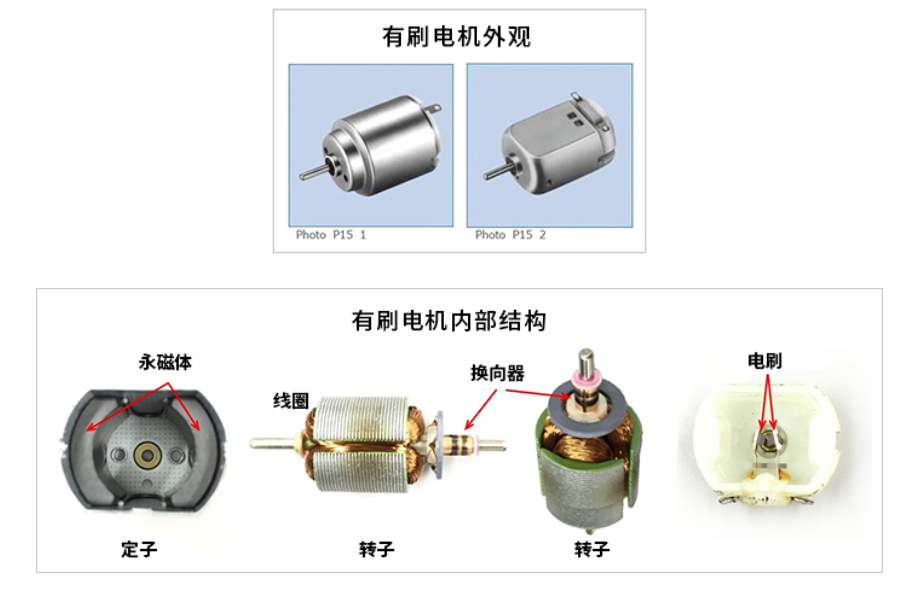
Structuur van geborstelde gelijkstroommotoren
Hieronder ziet u het uiterlijk van een geborstelde gelijkstroommotor die vaak in modellen wordt gebruikt, en een schematisch diagram van de storing van een normale tweepolige (2 magneten) motor met drie sleuven (3 spoelen). Misschien hebben velen van jullie ervaring met het demonteren van de DC-elektromotor en het verwijderen van de magneten.
Je kunt zien dat de permanente magneten van een geborstelde gelijkstroommotor vast zijn, en dat de spoelen van een geborstelde gelijkstroommotor rond het interne centrum kunnen draaien.
The fixed side is called the "stator" and the rotating side is called the "rotor".
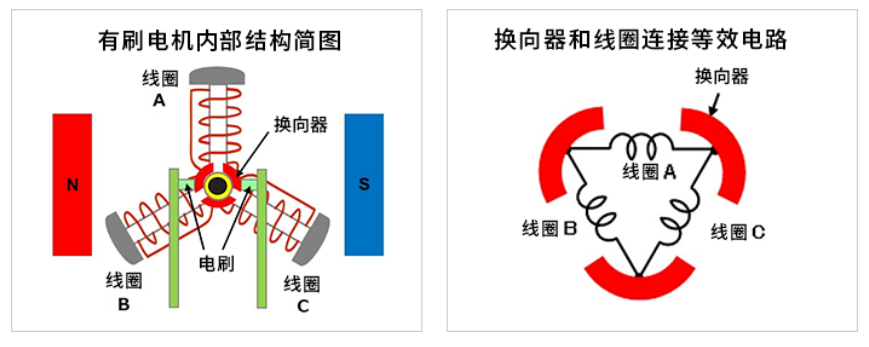
Het volgende is een structurele schets die het concept van structuur weergeeft.
De omtrek van de roterende centrale as heeft drie commutatoren (gebogen metalen platen voor stroomschakeling).
Om contact met elkaar te vermijden, zijn de commutatoren 120° uit elkaar geplaatst (360° ÷ 3 stuks). De commutatoren roteren met de rotatie van de as.
Eén commutator is verbonden met het ene spoeluiteinde en het andere spoeluiteinde, en de drie commutatoren en de drie spoelen vormen een geheel (ring) als een circuitnetwerk.
Twee borstels zijn vastgezet op 0° en 180° om contact te maken met de commutator.
Een externe gelijkstroomvoeding is aangesloten op de borstels en de stroom vloeit in het pad borstel → commutator → spoel → borstel.
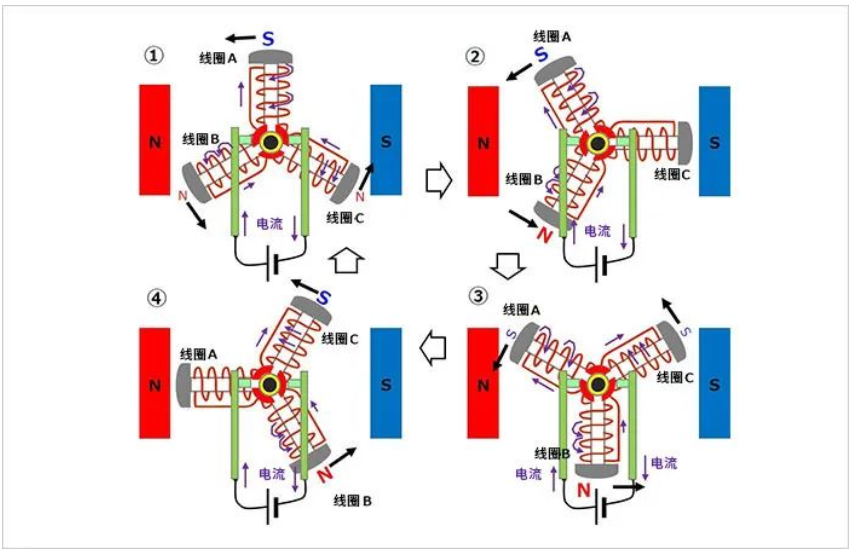
Rotatieprincipe van borstel-DC-motor
① Draai tegen de klok in vanuit de begintoestand
Spoel A bevindt zich bovenaan en verbindt de voeding van het elektrische gereedschap met de borstels. Stel de linkerkant in als (+) en de rechterkant als (-).
Er vloeit een grote stroom van de linkerborstel door de commutator naar spoel A.
Dit is de structuur waarbij het bovenste deel (buitenkant) van spoel A de S-pool wordt.
En aangezien de helft van de stroom van spoel A van de linkerborstel naar spoelen B en C vloeit in de tegenovergestelde richting van spoel A, worden de buitenkanten van spoelen B en C zwakke N-polen (aangegeven door iets kleinere letters in de figuur).
De magnetische velden die in deze spoelen worden gegenereerd en de afstotende en aantrekkelijke effecten van de magneten zorgen ervoor dat de spoelen worden onderworpen aan een rotatiekracht tegen de klok in.
② Verdere rotatie tegen de klok in
Neem vervolgens aan dat de rechterborstel in contact is met beide commutatoren in een toestand waarin spoel A 30° tegen de klok in wordt gedraaid.
De stroom van spoel A vloeit continu van de linkerborstel door de rechterborstel en de buitenzijde van de spoel blijft S-pool.
Dezelfde stroom als spoel A stroomt door spoel B, en de buitenkant van spoel B wordt sterker N-pool.
Omdat de uiteinden van spoel C door de borstels worden kortgesloten, vloeit er geen stroom en wordt er geen magnetisch veld gegenereerd.
Zelfs in dit geval is er sprake van een rotatiekracht tegen de klok in.
De spoel aan de bovenzijde van ③ tot ④ wordt continu onderworpen aan een kracht die naar links beweegt, en de onderste spoel wordt continu onderworpen aan een kracht die naar rechts beweegt en blijft tegen de klok in draaien
Wanneer de spoel elke 30° roteert naar ③ en ④, wordt de buitenkant van de spoel de S-pool wanneer de spoel zich boven de centrale horizontale as bevindt; wanneer de spoel zich onder bevindt, wordt deze de N-pool en wordt de beweging herhaald.
Met andere woorden, de bovenste spoel wordt herhaaldelijk onderworpen aan een kracht die naar links beweegt en de onderste spoel wordt herhaaldelijk onderworpen aan een kracht die naar rechts beweegt (beide tegen de klok in). Hierdoor draait de rotor te allen tijde tegen de klok in.
Als er stroom wordt aangesloten op de tegenoverliggende linkerborstel (-) en rechterborstel (+), wordt er een magnetisch veld gegenereerd in de statorwikkelingen van de spoelen in de tegenovergestelde richting, zodat de kracht die op de spoelen wordt uitgeoefend in de tegenovergestelde richting beweegt en met de klok mee draait .
Wanneer de stroom wordt uitgeschakeld, stopt de rotor van de borstelmotor bovendien met draaien omdat hij geen magnetisch veld meer heeft dat hem laat draaien.
Borstelloze driefasige dubbelgolfmotor
Uiterlijk en structuur van een driefasige borstelloze motor met dubbele golf
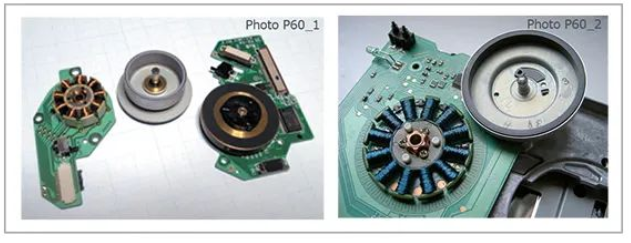
De volgende afbeelding toont een voorbeeld van het uiterlijk en de structuur van een borstelloze motor.
Links ziet u een voorbeeld van een spilmotor die wordt gebruikt om een schijf in een schijfafspeelapparaat te draaien. Er zijn 9 spoelen van drie fasen x 3. Aan de rechterkant ziet u een voorbeeld van een spilmotor voor een FDD-apparaat met 12 spoelen (driefasig x 4). De spoelen worden op het bord bevestigd en om de kern gewikkeld.
Het schijfvormige deel aan de rechterkant van de spoelen is de permanente magneetrotor. De rotoras wordt in het midden van de spoel gestoken en bedekt het spoelgedeelte, en de permanente magneten omringen de omtrek van de spoel.
De interne structuur van de driefasige full-wave borstelloze motor en het equivalente circuit van de spoelaansluiting
Hierna volgt een schets van de interne structuur en het equivalente circuit van de spoelaansluiting.
Deze interne structuurschets is een voorbeeld van een 2-polige (2 magneten) 3-slots (3 spoelen) motor met een zeer eenvoudige structuur. Het is vergelijkbaar met de structuur van een borstelmotor met hetzelfde aantal polen en sleuven, maar de spoelzijde is vast en de magneten kunnen worden gedraaid. Natuurlijk zijn er geen borstels.
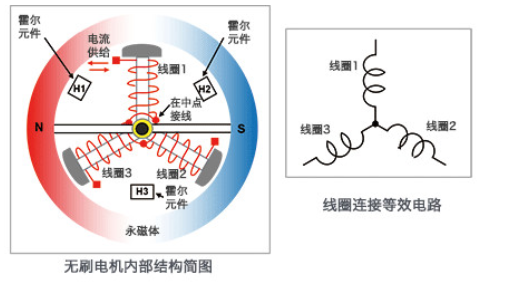
In dit geval zijn de spoelen in een Y-vorm verbonden en wordt een halfgeleiderelement gebruikt om stroom aan de spoelen te leveren, waarbij de in- en uitstroom van stroom wordt geregeld afhankelijk van de positie van de roterende magneten.
In dit voorbeeld wordt een Hall-element gebruikt om de positie van de magneet te detecteren. Het Hall-element is geconfigureerd tussen de spoel en de spoel om de gegenereerde spanning te detecteren en te gebruiken als positie-informatie op basis van de magnetische veldsterkte. In de eerder gegeven afbeelding van de FDD-spilmotor ziet u ook het Hall-element dat wordt gebruikt om de positie tussen de spoel en de spoel (boven de spoel) te detecteren.
Hall-elementen staan bekend als magnetische sensoren.
Het kan de grootte van het magnetische veld omzetten in de grootte van de spanning en de richting van het magnetische veld in positieve of negatieve termen aangeven.
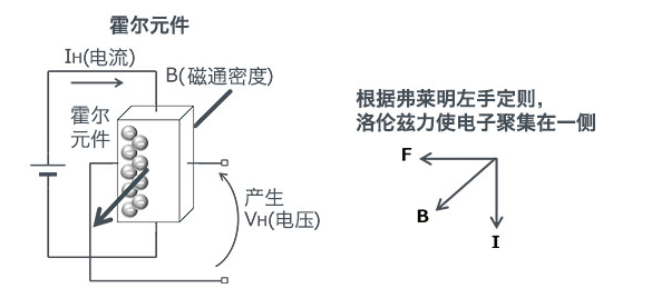
Hieronder ziet u een diagram dat het Hall-effect laat zien.
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
De resulterende spanning VH wordt uitgedrukt door de volgende vergelijking.
VH = (KH / d)・IH・B ※KH: Hall-coëfficiënt, d: dikte van het fluxpenetratieoppervlak
Zoals de formule laat zien: hoe hoger de stroom, hoe hoger de spanning. Deze eigenschap wordt vaak gebruikt om de positie van de rotor (magneet) te detecteren.
Rotatieprincipe van driefasige borstelloze motor met volledige golf
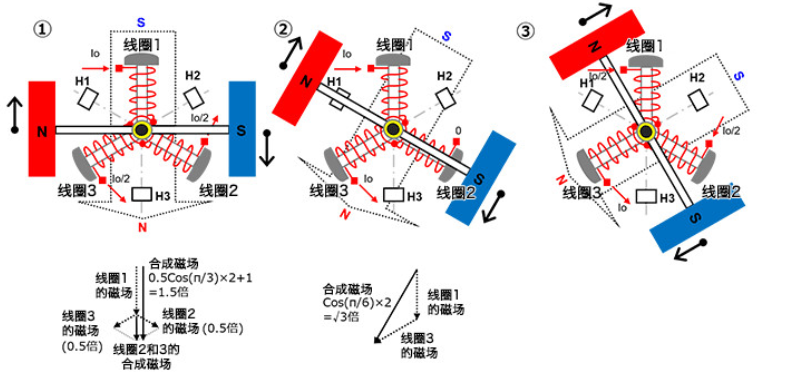
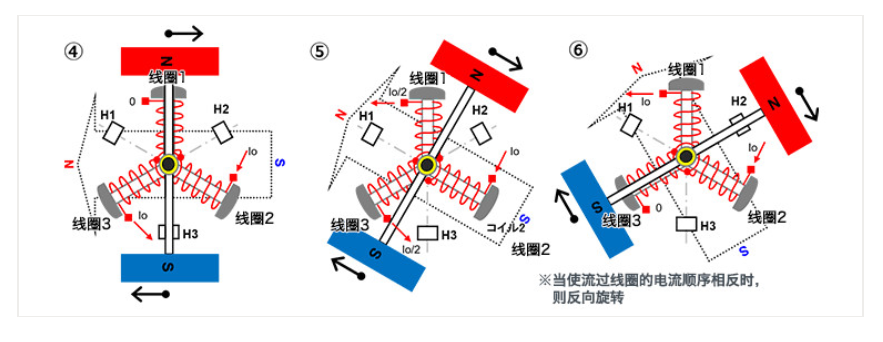
Het rotatieprincipe van de borstelloze motor wordt uitgelegd in de volgende stappen ① tot ⑥. Voor een beter begrip is de permanente magneet hier vereenvoudigd van een cirkel naar een rechthoek.
①
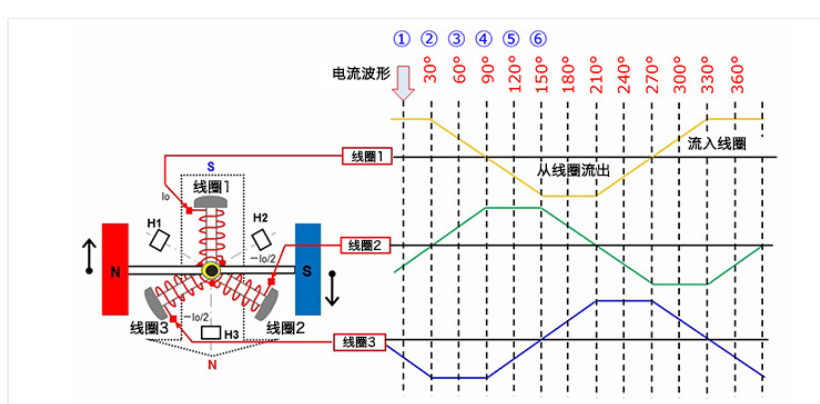
Bij een driefasenspoel stelt u spoel 1 vast op 12 uur, spoel 2 vast op 4 uur en spoel 3 op 8 uur. Laat de N-pool van de 2-polige permanente magneet zich aan de linkerkant bevinden en de S-pool aan de rechterkant en draaibaar.
Laat de stroom Io in spoel 1 stromen om het magnetische veld van de S-pool aan de buitenkant van de spoel te produceren. Laat de stroom Io/2 uit spoel 2 en spoel 3 vloeien, zodat aan de buitenkant van de spoel een N-pool magnetisch veld ontstaat.
Wanneer de magnetische velden van de spoelen 2 en 3 vectorgesynthetiseerd zijn, wordt het magnetische veld van de N-pool naar beneden gegenereerd, wat 0,5 maal de grootte is van het magnetische veld dat wordt gegenereerd wanneer de stroom Io door een spoel gaat, en wordt 1,5 maal de grootte wanneer toegevoegd aan het magneetveld van spoel 1. Hierdoor ontstaat een synthetisch magneetveld onder een hoek van 90° ten opzichte van de permanente magneet, waardoor het maximale koppel kan worden opgewekt en de permanente magneet rechtsom draait.
Wanneer de stroom in spoel 2 wordt verminderd en de stroom in spoel 3 wordt verhoogd afhankelijk van de draaipositie, draait het synthetische magnetische veld ook met de klok mee en blijft de permanente magneet draaien.
②
In de geroteerde toestand van 30° vloeit de stroom Io in spoel 1 zodat de stroom in spoel 2 nul is, waardoor de stroom Io uit spoel 3 vloeit.
De buitenkant van spoel 1 wordt de S-pool en de buitenkant van spoel 3 wordt de N-pool. Wanneer de vector wordt gesynthetiseerd, is het geproduceerde magnetische veld √3 (≈1,72) maal het magnetische veld dat wordt geproduceerd wanneer de stroom Io door één spoel gaat. Dit produceert ook een gesynthetiseerd magnetisch veld onder een hoek van 90 ° ten opzichte van het magnetische veld van de permanente magneet, en draait met de klok mee.
Wanneer de instroomstroom Io van spoel 1 wordt verminderd volgens de roterende positie, wordt de instroomstroom van spoel 2 verhoogd van nul en wordt de uitstroomstroom van spoel 3 verhoogd naar Io, roteert het synthetische magnetische veld ook met de klok mee, en de permanente magneet blijft draaien.
Ervan uitgaande dat de stroom in elke fase sinusoïdaal is, is de huidige waarde hier Io × sin(π⁄3) = Io × √3⁄2. Door vectorsynthese van het magnetische veld is de totale magnetische veldgrootte (√3⁄2)2 × 2 = 1,5 keer het magnetische veld dat door één spoel wordt gegenereerd. Wanneer de stromen in elke fase sinusoïdaal zijn, is de grootte van het magnetische veld van de vectorsynthese 1,5 maal het magnetische veld dat door één spoel wordt geproduceerd, ongeacht de positie van de permanente magneet, en staat het magnetische veld in een hoek van 90° ten opzichte van het magnetische veld van de permanente magneet.
③
In de toestand waarin de rotatie 30° heeft voortgezet, stroomt de stroom Io/2 naar spoel 1, de stroom Io/2 naar spoel 2 en de stroom Io uit spoel 3.
De buitenkant van spoel 1 wordt de S-pool, de buitenkant van spoel 2 wordt ook de S-pool en de buitenkant van spoel 3 wordt de N-pool. Wanneer de vector wordt gesynthetiseerd, is het geproduceerde magnetische veld 1,5 keer het magnetische veld dat wordt geproduceerd wanneer de stroom Io door één spoel stroomt (hetzelfde als ①). Ook hier wordt een synthetisch magneetveld opgewekt dat onder een hoek van 90° staat ten opzichte van het magneetveld van de permanente magneet en met de klok mee draait.
④~⑥
Draai op dezelfde manier als ① tot ③.
Op deze manier zal, als de stroom die in de spoel vloeit continu opeenvolgend wordt geschakeld, afhankelijk van de positie van de permanente magneet, de permanente magneet in een vaste richting roteren. Op dezelfde manier zal, als de stroom wordt omgekeerd en de richting van het synthetische magnetische veld wordt omgekeerd, het tegen de klok in draaien.
Het volgende diagram toont achtereenvolgens de stromen in elke spoel voor elk van de stappen ① tot ⑥ hierboven. De relatie tussen huidige verandering en rotatie moet worden begrepen door de bovenstaande beschrijving.
Stappenmotoren
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
Structuur van stappenmotor (tweefasig bipolair)
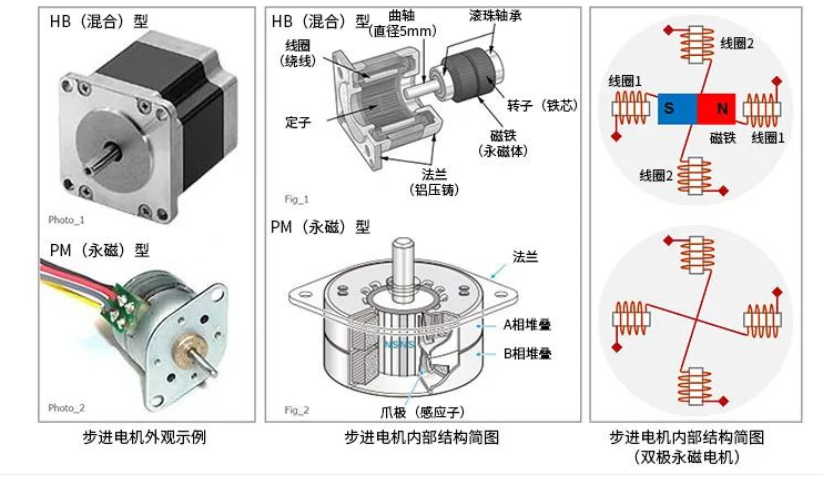
De volgende diagrammen tonen, van links naar rechts, een voorbeeld van het uiterlijk van een stappenmotor, een schets van de interne structuur en een schets van het structuurconcept.
In het uiterlijkvoorbeeld wordt het uiterlijk van stappenmotoren van het type HB (hybride) en PM (permanente magneet) gegeven. Voor het HB-type en het PM-type wordt ook het middenstructuurdiagram gegeven.
De stappenmotor is een structuur waarin de spoel vastzit en de permanente magneet roteert. Het conceptuele diagram van de interne structuur van een stappenmotor aan de rechterkant is een voorbeeld van een PM-motor die tweefasige (twee sets) spoelen gebruikt. In het voorbeeld van de basisstappenmotorstructuur zijn de spoelen aan de buitenkant geconfigureerd en zijn de permanente magneten aan de binnenkant geconfigureerd. Naast tweefasige spoelen zijn er ook typen met een groter aantal fasen zoals driefasig en vijffasig.
Sommige stappenmotoren hebben andere structuren, maar de basisstructuur van de stappenmotor wordt in dit artikel gegeven om de introductie van het werkingsprincipe ervan te vergemakkelijken. Met dit artikel hopen we de basisstructuur van stappenmotoren met vaste spoelen en roterende permanente magneten te begrijpen.
Basiswerkingsprincipe van stappenmotor (eenfasige excitatie)
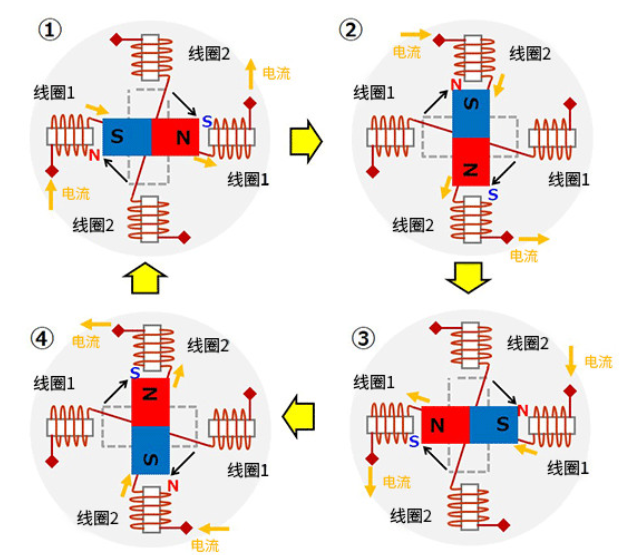
Het volgende diagram wordt gebruikt om het basiswerkingsprincipe van een stappenmotor te introduceren. Dit is een voorbeeld van excitatie voor elke fase (set spoelen) van de tweefasige bipolaire spoelen hierboven. Het uitgangspunt van het diagram is dat de toestand verandert van ① naar ④. De spoelen bestaan respectievelijk uit spoel 1 en spoel 2. Bovendien geven de stroompijlen de richting van de stroom aan.
①
・Laat de stroom van de linkerkant van spoel 1 naar buiten stromen van de rechterkant van spoel 1.
・Laat geen stroom door spoel 2 stromen.
・Op dit moment wordt de binnenkant van de linkerspoel 1 N en de binnenkant van de rechterspoel 1 wordt S.
・Als resultaat wordt de middelste permanente magneet aangetrokken door het magnetische veld van spoel 1 en verandert naar de linkerkant S en de rechterkant N en stopt.
②
・De stroom van spoel 1 wordt gestopt zodat de stroom van de bovenkant van spoel 2 naar binnen en van de onderkant van spoel 2 naar buiten stroomt.
・De binnenkant van de bovenste spoel 2 verandert in N en de binnenkant van de onderste spoel 2 verandert in S.
・De permanente magneet wordt aangetrokken door zijn magnetisch veld en draait 90° met de klok mee om te stoppen.
③
・De stroom van spoel 2 wordt gestopt zodat de stroom van de rechterkant van spoel 1 naar binnen stroomt en van de linkerkant van spoel 1 naar buiten stroomt.
・De binnenkant van de linkerspoel 1 wordt S en de binnenkant van de rechterspoel 1 wordt N.
・De permanente magneet wordt aangetrokken door zijn magnetisch veld en draait nog eens 90° met de klok mee om te stoppen.
④
・Stop de stroom in spoel 1 zodat de stroom van de onderkant van spoel 2 naar binnen en van de bovenkant van spoel 2 naar buiten stroomt.
・De binnenkant van de bovenste spoel 2 wordt S en de binnenkant van de onderste spoel 2 wordt N.
・De permanente magneet wordt aangetrokken door zijn magnetisch veld en draait nog eens 90° met de klok mee om te stoppen.
De stappenmotor kan worden geroteerd door de stroom die door de spoel vloeit door het elektronische circuit te schakelen in de volgorde van ① tot ④ hierboven. In dit voorbeeld zorgt elke schakelactie ervoor dat de stappenmotor 90° draait.
Bovendien kan, wanneer de stroom continu door een spoel vloeit, de stoptoestand worden gehandhaafd en kan de stappenmotor een houdkoppel hebben. Overigens, als de volgorde van de stroom die door de spoel vloeit, wordt omgekeerd, kan de stappenmotor in omgekeerde richting worden gedraaid.
Vind een professionele fabrikant van industriële motoren - Dongchun motor China
 Doorgaan naar artikel
Doorgaan naar artikel