 Doorgaan naar artikel
Doorgaan naar artikel Wat is het verschil tussen een borstelloze motor en een borstelmotor?
Wat is het verschil tussen een synchrone motor en een asynchrone motor?
Hoe zit het met de inductiemotor met wondrotor?
Zijn alle servomotoren AC-motoren?
Zijn alle servomotoren synchrone motoren?
Behoren stappenmotoren tot DC-motoren of AC-motoren?
Is een servomotor een servomotor? ......
De wijzen zeiden ooit: Als kennis niet systematisch is, wat is dan het verschil tussen kennis en een paragraaf?
Maar het wijze boek over die langdradige tekst, die fantasierijke terminologie, die plausibele verklaring, kijkt echt naar mensen in de wolken.
Ik heb ook lang op internet gezocht, maar vond geen meer systematische uitleg van de structuur van de elektromotoren en het classificatieprincipe, dus het kostte me veel moeite om een kopie op te vragen en te ordenen.
Dit artikel probeert de systematische kennis in gewone taal uit te leggen, en gebruikt veel animaties en afbeeldingen om de obscure kennis levendig uit te drukken.
Vanwege mijn beperkte kennis is het onvermijdelijk dat er veel fouten in staan. Corrigeer alstublieft de experts, aarzel niet om advies te geven.
1. een schema om de basistypen elektromotoren uit te leggen

2. DC-elektromotor - borstelmotor
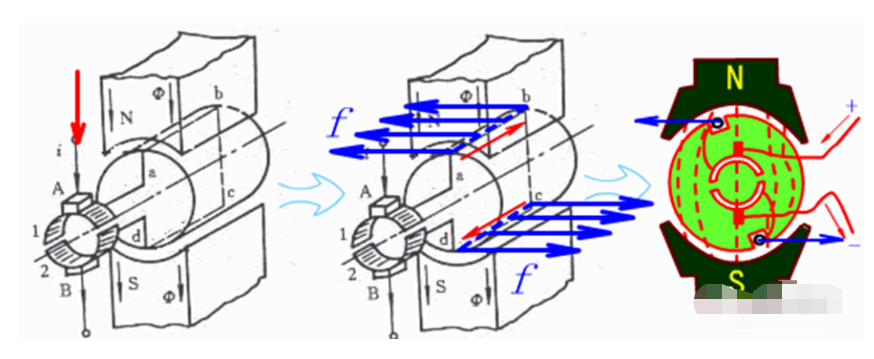
Lees de natuurkunde van de middelbare school van het pestkop-tuig, weet dat om de bekrachtigde geleider in de magnetische veldkracht van dat ding te bestuderen, we de linkerhand in een gebroken handpalm hebben getraind, wat precies het principe is van de DC-inductiemotor.
Alle elektromotoren zijn samengesteld uit stator en rotor. Bij DC-elektromotoren moet je, om de rotor te laten draaien, voortdurend de richting van de stroom veranderen, anders kan de rotor maar een halve slag draaien, dit is als een fietspedaal .
Daarom hebben DC-motoren commutatoren nodig.
In grote lijnen omvatten geborstelde gelijkstroommotoren geborstelde motoren en borstelloze motoren.
Borstelmotor wordt ook DC-inductiemotor of koolborstelmotor genoemd, vaak borstel-DC-motor genoemd.
Het maakt gebruik van mechanische commutatie, de externe pool beweegt de interne spoel (anker) niet in beweging, commutator en rotorspoel roteren samen, borstels en magneten bewegen niet, dus de commutator en borstelwrijvingswrijving voltooien de stroomrichtingomschakeling.
Nadelen van de borstelmotor.
1, mechanische commutatie van vonken gegenereerd door de commutator en borstelwrijving, elektromagnetische interferentie, hoog geluid, korte levensduur.
2, slechte betrouwbaarheid, veel storingen, die regelmatig onderhoud vereisen.
3, vanwege de aanwezigheid van een commutator, die de traagheid van de rotor beperkt, de maximale snelheid beperkt en de dynamische prestaties beïnvloedt.
Omdat het zoveel tekortkomingen heeft, wordt het nog steeds vaak gebruikt, omdat het een hoog koppel heeft, een eenvoudige structuur, gemakkelijk onderhoud (d.w.z. koolborstels vervangen), goedkoop.
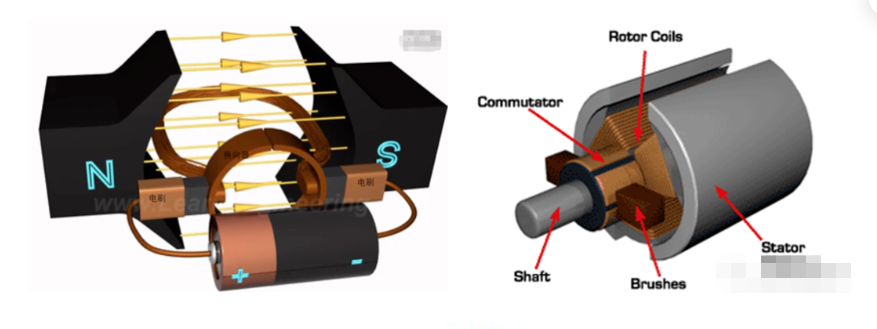
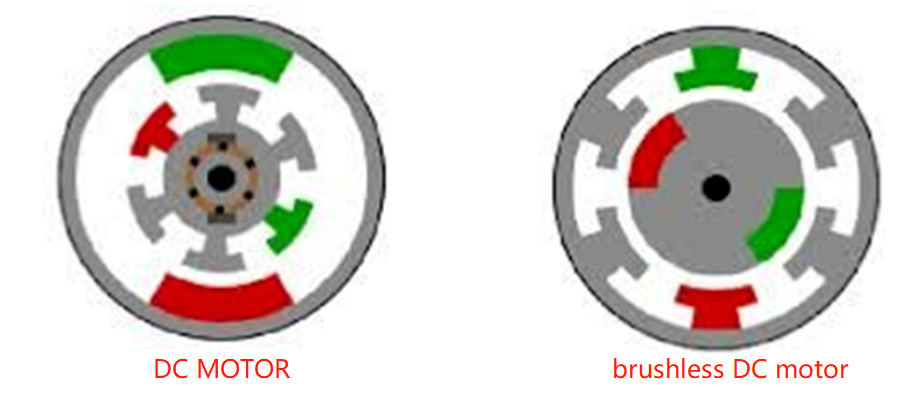
2. DC-motoren - borstelloze motoren
Borstelloze motor wordt in sommige velden ook DC-invertermotor (BLDC) genoemd, deze maakt gebruik van elektronische commutatie (Hall-sensor), de spoel (anker) beweegt niet, de magnetische polen bewegen, dan kan de permanente magneet zich buiten de spoel of in de spoel bevinden Er is dus een borstelloze motor met externe rotor en een borstelloze motor met interne rotor
Borstelloze motoren zijn op dezelfde manier geconstrueerd als synchrone motoren met permanente magneet.
Een enkele borstelloze motor is echter geen compleet voedingssysteem. Brushless moet in principe worden bestuurd door een borstelloze controller, ook wel ESC genoemd, om een continue werking te bereiken.
Het is de borstelloze elektronische regelaar (ESC) die de prestaties echt bepaalt.
Over het algemeen zijn er twee soorten aandrijfstromen voor borstelloze motoren: de ene is een blokgolf en de andere is een sinusgolf.
Soms wordt de eerste een DC-borstelloze motor genoemd, en de laatste een AC-servomotor, wat precies een soort AC-servomotor is.
Borstelloze motoren werken op verschillende manieren en kunnen worden onderverdeeld in borstelloze motoren met binnenrotor en borstelloze motoren met buitenrotor.
De binnenrotor is driefasig, wat duurder is.
De buitenste rotor wordt meestal in eenfase gebruikt, de prijs van de mensen, massaproductie ligt dicht bij de koolborstelmotor, dus de laatste jaren wordt deze op grote schaal gebruikt.
De prijs van de driefasige buitenrotor ligt dicht bij de prijs van de binnenrotor.
Zoals je kunt raden, is het nadeel van borstelmotoren het punt van borstelloze motoren.
Het heeft een hoog rendement, een laag energieverbruik, een laag geluidsniveau, een lange levensduur, hoge betrouwbaarheid, servobesturing, traploze frequentieconversiesnelheid (tot zeer hoge snelheid) en andere voordelen.
Het is relatief kleiner dan de DC-borstelmotor, de bediening dan de asynchrone AC-motor is eenvoudig, het startkoppel is groot overbelastbaarheid, wat de nadelen betreft ...... is duurder dan de borstel, slecht onderhoud.
2. DC-motor - snelheidsregelprincipe
Snelheidsregeling DC-inductiemotor: de zogenaamde snelheidsregeling, dat wil zeggen door het motortoerental aan te passen om het vereiste koppel te verkrijgen.
DC-motor met permanente magneet door aanpassing van de spanning, serieweerstand, verandering van de excitatie kan snelheid zijn, maar de werkelijke spanningsaanpassing is het handigst en meest gebruikt, het belangrijkste gebruik van PWM-snelheidsregeling.
PWM is eigenlijk via de hogesnelheidsschakelaar om DC-spanningsregeling te bereiken, een cyclus, lange tijd open, de gemiddelde spanning hoog is, lange tijd uit, de gemiddelde spanning laag is, erg handig om aan te passen, zolang de schakelaar snelheid Zolang de schakelsnelheid snel genoeg is, zijn de harmonischen van het elektriciteitsnet minder en is de stroom continuer.
De borstels en de commutator slijten echter lange tijd, en tegelijkertijd is er een enorme stroomverandering tijdens de commutatie, waardoor er heel gemakkelijk vonken ontstaan.
De commutator en borstels beperken de capaciteit en snelheid van de DC-inductiemotor, waardoor de snelheidsregeling van de DC-inductiemotor op een knelpunt stuit.
Bij borstelloze DC-inductiemotoren regelt de snelheidsregeling alleen de ingangsspanning op het oppervlak.
Maar het zelfcontrolerende frequentieregelsysteem van de motor (borstelloze gelijkstroommotor zelf wordt geleverd met een rotorpositiedetector en een ander rotorpositiesignaalverwervingsapparaat, waarbij het rotorpositiesignaal van dit apparaat wordt gebruikt om het faseveranderingsmoment van het variabele spanningsfrequentieregelapparaat te regelen) regelt automatisch de frequentie volgens de variabele spanning, die bijna hetzelfde is als de DC (geborstelde) motor, erg handig. Erg handig.
Omdat de rotor permanente magneten gebruikt, geen speciale bekrachtigingswikkeling, is de motor bij dezelfde capaciteit kleiner, lichter, efficiënter, compacter, betrouwbaarder in werking, betere dynamische prestaties, bij de aandrijving van elektrische voertuigen en andere aspecten zijn op grote schaal gebruikt.
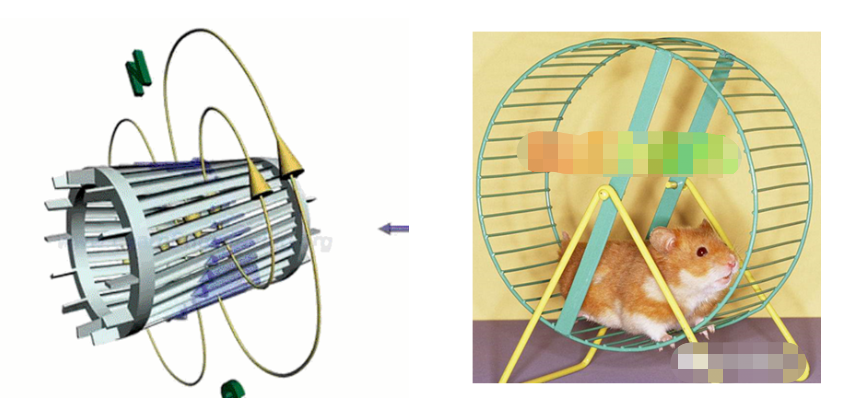
3. Driefasige wisselstroommotoren - asynchrone motoren
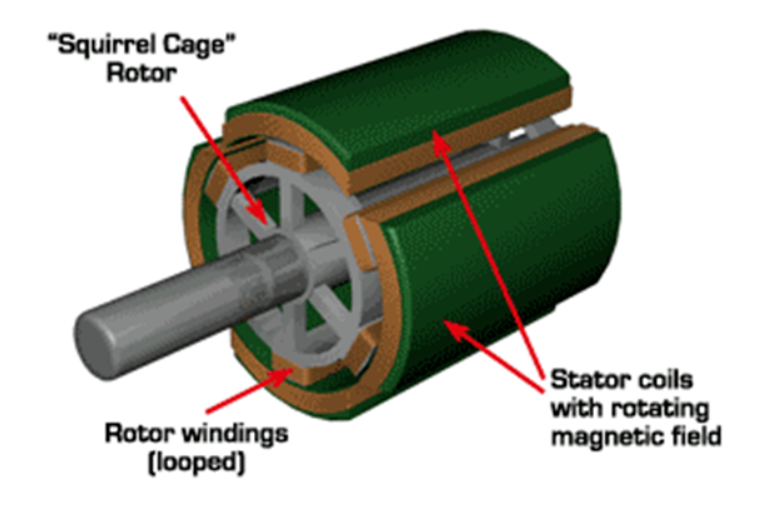
Wisselstroommotoren zijn onderverdeeld in synchrone motoren en asynchrone motoren, synchrone motoren worden meestal gebruikt in generatoren en asynchrone motoren worden meestal gebruikt in elektromotoren. Het zijn inductiemotoren met een eekhoornkooi.
De behuizing van de motor is de stator en er zijn drie symmetrische AC-wikkelingen op de stator.
Naarmate de volgorde van de drie fasen verandert, wordt een roterend synthetisch magnetisch veld gevormd en is de rotatiesnelheid van het magnetische veld de synchrone snelheid.
De synchrone snelheid n=60f/p, f is de frequentie, p is het aantal poolparen, bijvoorbeeld voor een 2-polige motor aangesloten op het landelijk elektriciteitsnet 50 Hz (d.w.z. het aantal poolparen is 1 paar), dan de snelheid n=60*50/1=3000r/min.
Op dezelfde manier is de synchrone snelheid van 4-polige, 6-polige en 8-polige motoren 1500, 1000 en 750.
Asynchrone motoren hebben een eenvoudig mechanisme met een gesloten spoelrotor, zoals een eekhoornkooitype.
De rotorspoel zal het roterende magnetische veld onderbreken om het geïnduceerde elektrische potentieel te genereren, dat op zijn beurt de geïnduceerde stroom genereert, en uiteindelijk het roterende magnetische veld.
Zodat de rotor een elektromagneet wordt en de rotatie van het magnetische veld van de stator zal volgen, dus de rotorsnelheid moet zijn < het roterende magnetische veld van de stator, om de magnetische inductielijnen te snijden.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Dat wil zeggen, de asynchrone snelheid van de rotor <synchrone snelheid, er is een snelheidsverschil tussen het magnetische veld van de rotor en de stator, daarom wordt dit een asynchrone motor genoemd.
Het nominale toerental van een asynchrone motor varieert enigszins van fabrikant tot fabrikant, ongeveer 2800+r/min voor een 2-polige motor, 1400+,950+,700+ voor een 4-polige, 6-polige en 8-polige asynchroonmotor.
De snelheid van een asynchrone motor is hoog als er geen belasting is, en neemt af als er wel belasting is.
Asynchrone motor heeft een eenvoudige structuur, eenvoudig onderhoud, betrouwbare werking en een goedkope prijs, dus wordt hij veel gebruikt.
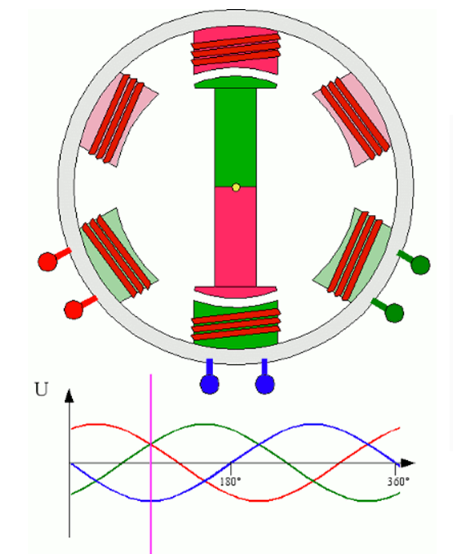
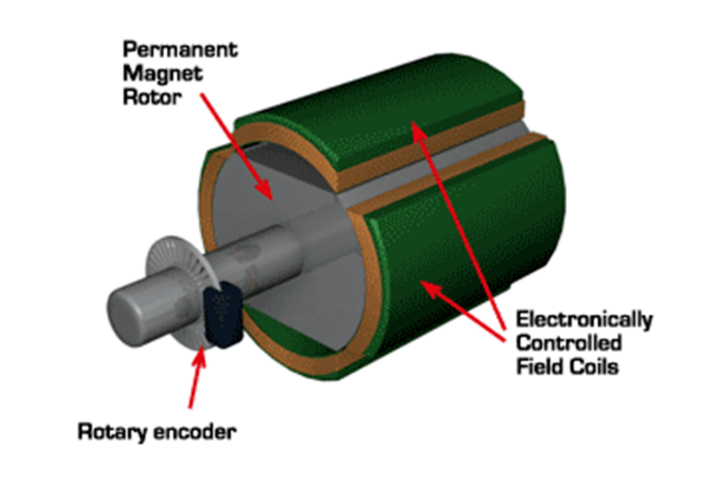
4. Driefasige wisselstroommotoren - synchrone motoren
Synchrone motor.
Als je de rotorsnelheid = de rotatiesnelheid van het magnetische veld van de stator laat, wordt het een synchrone motor. Op dit moment is het nodig om de stator in een elektromagneet of permanente magneet te veranderen, dat wil zeggen om de stator van stroom te voorzien, op dit moment niet langer nodig om de magnetische inductielijn te snijden kan roteren, de rotatiesnelheid en de rotatiesnelheid van het magnetische veld zijn hetzelfde, dat wil zeggen de vorming van een synchrone motor.
Synchrone motorrotorstructuur is complexer dan asynchrone motoren, hoge prijzen, in productieleven wordt niet zo veel gebruikt als asynchrone motoren, voornamelijk gebruikt als generatoren, nu zijn thermische krachtcentrales, waterkrachtcentrales, stoomturbines en hydraulische turbines in principe synchrone motoren.
5. Driefasige AC-motor - snelheidsregeling van asynchrone elektromotoren
Asynchrone motorsnelheidsregeling: theoretisch kan asynchrone motorregeling AC-frequentie, spanning of rotorweerstand, motorpoolverdeling snelheidsregeling zijn, maar in de praktijk kan een oneindige snelheidsregeling worden bereikt met de methode om de frequentie en spanning aan te passen.
Omdat het snelheidsbereik van de spanningsregeling niet groot is, kan het over het algemeen alleen worden gebruikt bij snelheidsregelingsvereisten, geen hoge gelegenheden, de toepassing is niet wijdverspreid.
Variabele frequentie-snelheidsregeling: Over frequentie gesproken, misschien hebben we er wel eens van gehoord.
De volledige naam van frequentieconversie is Variable Voltage Variable Frequency (VVVF), wat betekent dat de spanning wordt gewijzigd wanneer de frequentie wordt gewijzigd, zodat het snelheidsbereik van de asynchrone motor groot genoeg is.
Frequentieomvormers kunnen in twee grote categorieën worden onderverdeeld: AC-AC-frequentieomvormers en AC-DC-frequentieomvormers.
AC-DC-omvormer: Wisselstroom wordt door vermogenselektronica direct omgezet in wisselstroom met een andere frequentie.
De maximale uitgangsfrequentie kan niet hoger zijn dan de helft van de ingangsfrequentie, dus wordt deze over het algemeen alleen gebruikt in systemen met lage snelheid en hoge capaciteit, en kan de noodzaak van een grote tandwielreductie worden geëlimineerd.
AC-DC-omvormer zal de wisselstroom eerst in gelijkstroom gelijkrichten en deze vervolgens in wisselstroom veranderen met regelbare frequentie en spanning via de omvormer. Met PWM-technologie kan dit soort omvormer een breed scala aan variabele spanning en frequentie realiseren.
Voor elektrische voertuigen is de asynchrone motor duurzaam, sterk overbelastend en het besturingsalgoritme is zo volwassen dat het volledig kan worden gebruikt.
6. Driefasige AC-motor - snelheidsregeling van synchrone motor
Synchrone motortoerentalregeling:
Synchrone machines hebben geen turndown-snelheid en de stuurspanning kan de snelheid niet veranderen wanneer de structuur wordt bepaald, dus vóór de komst van frequentieomvormers waren synchrone motoren volledig ongereguleerd.
Het uiterlijk van een frequentieomvormer zorgt ervoor dat de AC-synchrone motor ook een enorm snelheidsregelbereik heeft, omdat de rotor ook onafhankelijke excitatie heeft (permanente magneet of elektrische excitatie), het snelheidsregelbereik groter is dan dat van een asynchrone motor, en de synchrone motor heeft een nieuw leven gekregen.
Synchrone motor variabele spanning variabele frequentie snelheidsregelsysteem kan worden onderverdeeld in andere geregelde variabele snelheidsregeling en zelfgestuurde variabele snelheidsregeling.
Voor andere gecontroleerde snelheidsregeling met variabele frequentie is deze vergelijkbaar met de variabele frequentieregeling van een asynchrone motor, die kan worden bestuurd door SVPWM en andere besturingsmethoden volgens het wiskundige model, en de prestaties zijn beter dan die van een gewone asynchrone AC-motor.
Zelfgestuurde synchrone invertermotor had tijdens het ontwikkelingsproces verschillende namen, zoals commutatorloze motor; bij gebruik van permanente magneten en het invoeren van een driefasige sinusgolf, kan dit een synchrone sinusgolfmotor met permanente magneet worden genoemd; en als je blokgolf invoert, kan het een synchrone motor met trapeziumvormige golf en permanente magneet worden genoemd, ja, het is vergelijkbaar met de eerder genoemde borstelloze gelijkstroommachine (BLDM), we hebben niet het gevoel dat er een grote cirkel van rap is omgedraaid. Ga terug, maar jij moet nu een dieper begrip hebben van variabele snelheid, dus borstelloze DC-motor bij gebruik van DC-ingang, maar het gebruik van synchrone motorfrequentieconversietechnologie (dezelfde structuur als de synchrone motor met permanente magneet), in Model3 over het gebruik van DC-borstelloze motor .
7. Eenfasige asynchrone AC-motor - eenfasige AC-serie-opgewonden motor (borstel)
Eenfasige AC-serie-geëxciteerde motor, algemeen bekend als serie-geëxciteerde motor of universele motor (vreemde naam UniversalMotor, genoemd vanwege AC en DC universeel), de ankerwikkeling en bekrachtigingswikkeling zijn in serie verbonden om samen te werken.
Eenfasige serie-opgewekte motor wordt ook AC-DC serie-opgewekte motor voor tweeërlei gebruik genoemd, die kan werken met wisselstroom of gelijkstroom.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
De voordelen van een enkelfasige serie-geëxciteerde motor zijn dat deze een hoge snelheid, een hoog startkoppel, een klein formaat, een laag gewicht, een niet gemakkelijk te blokkeren rotatie, een breed scala aan toepasselijke spanningen heeft en dat de snelheid kan worden geregeld door de methode van spanningsregeling. , wat eenvoudig en gemakkelijk te realiseren is.
Daarom wordt het veel gebruikt in elektrisch gereedschap, zoals haakse slijper, handboormachine, enz.
De structuur van een enkelfasige serie-opgewekte motor lijkt sterk op die van een DC-serie-opgewekte motor. Het belangrijkste verschil is dat de statorkern van een enkelfasige serie-opgewekte motor gemaakt moet zijn van gelamineerd siliciumstaal, terwijl de magnetische polen van DC kan zowel uit een gelamineerde als uit een integrale structuur bestaan.
Eenfasige serie-geëxciteerde motorsnelheidsregeling, de meeste methoden die worden gebruikt om de spanning aan te passen, zijn het veranderen van het elektrische potentieel.
De spanningsregelingsmethode van een enkelfasige serie-geëxciteerde motor maakt gebruik van gecontroleerde faseverschuivende spanningsregeling, die de triggerspanning van de SCR gebruikt om achter te blijven bij de ingangsspanning om de faseverschuivende trigger van de ingangsspanning te bereiken.
Er zijn hardware- en softwaremethoden bij de implementatie.
De gereguleerde spanningsmethode, die gebruik maakt van siliciumgestuurde snelheidsregelingstechnologie, heeft een eenvoudige lijn, kleine componenten en andere kenmerken van een siliciumgestuurde, eenvoudige en effectieve methode
(a) AC-stroomvariatiecurve;
(b) Rotatierichting van de rotor wanneer de stroom een positieve halve golf is
(c) Rotatierichting van de rotor wanneer de stroom een negatieve halve golf is

8. Eenfasige asynchrone AC-motor - eenfasige AC-kooiankermotor (borstelloos)
Eenfasige stroom door de ankerwikkeling produceert een pulserend magnetisch veld in plaats van een roterend magnetisch veld, dus eenfasige asynchrone motoren kunnen niet zelfstartend zijn.
Om het startprobleem op te lossen, worden enkelfasige asynchrone motoren met wisselstroom vaak feitelijk tweefasig gemaakt.
De hoofdwikkeling wordt rechtstreeks gevoed door de eenfasige voeding; de secundaire wikkeling verschilt ruimtelijk van de hoofdwikkeling met 90° (elektrische hoek, gelijk aan de mechanische hoek gedeeld door het aantal motorpoolparen).
De secundaire wikkeling is verbonden met een enkelfasige wisselstroomvoeding na serieschakeling van een condensator of weerstand, zodat de stroom die erdoorheen gaat en de stroom in de hoofdwikkeling een bepaald faseverschil hebben.
Hierdoor wordt het synthetische magneetveld een elliptisch draaiveld, of wellicht zelfs dichtbij een cirkelvormig draaiveld.
De motor verkrijgt zo een startkoppel.
De motor die gebruik maakt van de weerstandsfasescheidingsmethode is goedkoop, de secundaire wikkeling kan bijvoorbeeld worden gewikkeld met een dunnere draad, maar het fasescheidingseffect is slecht en er wordt energie verbruikt in de weerstand.
Nadat de motor is gestart en een bepaalde snelheid heeft bereikt, wordt de secundaire wikkeling meestal automatisch verwijderd door een centrifugaalschakelaar die op de motoras is gemonteerd om de weerstandsverliezen te verminderen en de bedrijfsefficiëntie te verbeteren.
Het wordt over het algemeen gebruikt voor de gelegenheid dat de vereiste startkoppel niet hoog is, zoals bij een kleine draaibank, een kleine koelkast, enz. Het nadeel is dat de snelheid niet kan worden aangepast.
Het is mogelijk om het synthetische magnetische veld van de motor dichtbij het cirkelvormige roterende magnetische veld op een bepaald werkpunt van de motor te brengen, om zo betere werkeigenschappen te verkrijgen.
Om ervoor te zorgen dat de asynchrone motor met gesplitste fase betere startprestaties of betere bedrijfseigenschappen of beide verkrijgt, is de vereiste capaciteit (hoeveelheid waarde) verschillend en kan deze in drie soorten worden verdeeld
9. stappenmotoren - stappenmotoren met open lus
(Open-loop) stappenmotoren zijn open-loop gestuurde motoren die elektrische pulssignalen omzetten in hoekverplaatsingen, en worden zeer veel gebruikt.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
Het aantal pulsen kan worden geregeld om de hoeveelheid hoekverplaatsing te regelen, om het doel van nauwkeurige positionering te bereiken; Tegelijkertijd kan de pulsfrequentie worden geregeld om de snelheid en versnelling van de motorrotatie te regelen, om het doel van snelheidsregeling te bereiken.
Stappenmotor is een soort inductiemotor, die werkt door gebruik te maken van een elektronisch circuit, dat wil zeggen een driver, om gelijkstroom om te zetten in een time-sharing aangedreven meerfasige timing-stuurstroom.
Hoewel stappenmotoren worden aangedreven door gelijkstroom, kunnen ze niet worden opgevat als gelijkstroommotoren, dit zijn vermogensmotoren die elektrische gelijkstroomenergie omzetten in mechanische energie, terwijl stappenmotoren regelmotoren met open lus zijn die elektrische pulssignalen omzetten in hoekverplaatsing.
10. Vergelijking stappenmotor - stappenservo
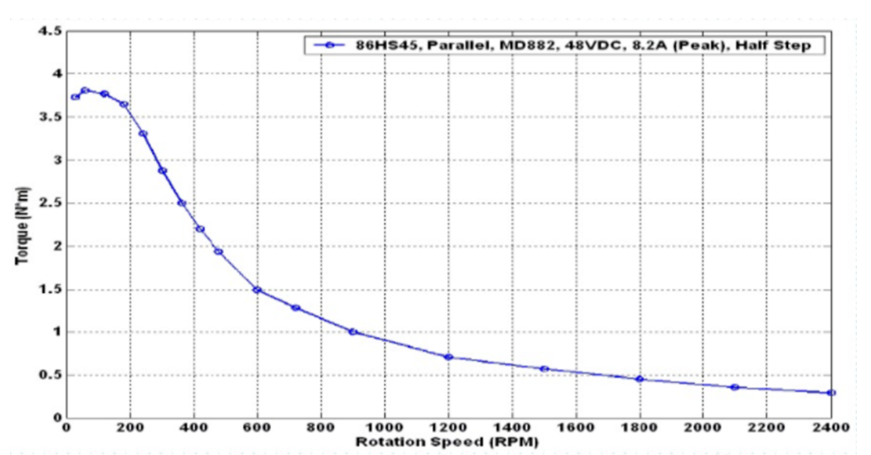
Houd er rekening mee dat stappenmotoren worden gebruikt in toepassingen met lage snelheden - niet meer dan 1000 tpm per minuut, het beste werkbereik is 150~500 tpm (met gesloten lus oplopend tot 1500).
2-fase stappenmotor bij 60 ~ 70r/min is gevoelig voor resonantieverschijnselen bij lage snelheid, waardoor trillingen en geluid ontstaan, wat moet worden vermeden door de reductieverhouding te wijzigen, de fijne fractie te vergroten, magnetische dempers toe te voegen, enz.
Voorzorgsmaatregelen voor de nauwkeurigheid van de onderverdeling, wanneer het onderverdelingsniveau groter is dan 4, kan de nauwkeurigheid van de staphoek niet worden gegarandeerd, hoge precisie-eisen, het is het beste om over te schakelen naar meer fasen (dat wil zeggen een kleinere staphoek) van de stappenmotor of gesloten lusstepper, servomotor.
(Open-loop) stappenmotor en servomotor 7 verschillende.
Een regelnauwkeurigheid - de nauwkeurigheid van de servomotorregeling kan worden ingesteld volgens de encoder, hogere nauwkeurigheid.
B laagfrequente kenmerken - stappenmotoren zijn gevoelig voor trillingen bij lage frequenties, servomotoren niet.
C moment-frequentiekarakteristieken - het koppel van de stappenmotor wordt kleiner naarmate de snelheid toeneemt, dus de maximale bedrijfssnelheid ligt over het algemeen in <1000r/min, servomotor met een nominaal toerental (doorgaans 3000r/min) kan het nominale koppel leveren, met een nominaal toerental boven het constante vermogen, de maximale snelheid tot 5000 r/min;
D overbelastbaarheid - stappenmotor kan niet worden overbelast, het maximale koppel van de servomotor kan 3 keer worden overbelast.
E bedrijfsprestaties - stappenmotor voor open-lusregeling, servomotor bij gesloten-lusregeling.
F-snelheidsrespons - opstarttijd stappenmotor 0,15 ~ 0,5s, servomotor 0,05 ~ 0,1, de snelste 0,01s om de nominale 3000r / min te bereiken.
G-efficiëntie-indicatoren - stappenmotorrendement van ongeveer 60%, servomotor ongeveer 80%.
Bij feitelijk gebruik zal blijken: servomotor duur, duur uit vele, dus synchrone motoren worden op grotere schaal gebruikt, vooral in de positioneringsnauwkeurigheidseisen zijn niet erg hoge synchrone riemaandrijving, vlakke transportband en andere gelegenheden maken vaak gebruik van stappenmotor.
11. Stappenmotoren - stappenmotoren met gesloten lus
Stappenmotoren met gesloten lus: Naast stappenmotoren met open lus zijn er stappenmotoren waaraan een encoder aan het uiteinde van de motor is toegevoegd, waardoor regeling met gesloten lus mogelijk is.
Gesloten-lusregeling van stappenmotoren maakt gebruik van positiefeedback en/of snelheidsfeedback om faseovergangen te bepalen die geschikt zijn voor de rotorpositie, wat de prestaties van stappenmotoren aanzienlijk kan verbeteren.
Servosystemen zonder uit de pas gelopen verschijnselen.
Voordelen van stappenmotoren met gesloten lus.
1. Snelle reactie. Vergeleken met geschikte motoren volgt de stepper met gesloten lus de positioneringscommando's zeer sterk, waardoor de positioneringstijd erg kort is. Bij toepassing van frequent starten/stoppen kan de positioneringstijd aanzienlijk worden verkort.
2. Genereer meer koppel dan gewone servo. Compenseer het gebrek aan stapverlies en trillingen bij lage snelheid van een gewoon stappensysteem.
3. Een hoog koppel kan zelfs onder 100% belasting worden gegenereerd, zonder verlies van trapwerking, zonder rekening te houden met koppelverlies en andere problemen zoals bij gewone trapsystemen.
4. Door toepassing van de closed-loop drive kan de efficiëntie worden verhoogd tot 7,8 keer, het uitgangsvermogen kan worden verhoogd tot 3,3 keer en de snelheid kan worden verhoogd tot 3,6 keer.
Het kan een hogere loopsnelheid, een stabielere en soepelere snelheid krijgen dan open-lusregeling.
5. De stappenmotor zal volledig stationair zijn wanneer hij stopt, zonder het microvibratieverschijnsel van een gewone servo.
Het kan de toepassing van een servosysteem voor algemeen gebruik vervangen wanneer positionering tegen lage kosten en hoge precisie vereist is.
12. stappenmotor - stappenmotor servovergelijking met gesloten lus
Stappenmotoren met gesloten lus passen automatisch de grootte van de wikkelstroom aan op basis van de grootte van de belasting, warmte en trillingen zijn minder dan stappenmotoren met open lus, er is feedback van de encoder, zodat de nauwkeurigheid hoger is dan die van gewone stappenmotoren, motorrespons dan open lus stepper langzamer dan servomotoren sneller, er is een positiefout tijdens bedrijf, de fout zal geleidelijk afnemen in milliseconden nadat het commando stopt.
Koppel met hoge snelheid dan stepper met open lus, veel voorkomende toepassingen bij 0-1500 tpm.
Samenvattend: stappenmotor met gesloten lus met lage kosten, hoog rendement, geen jitter, geen stop-microvibratie, hoge stijfheid, geen rectificatie, hoge snelheid, hoge dynamische respons, enz., is de vervanging van dure servosystemen, low-end open-loop stappensystemen en andere kosteneffectieve oplossingen
13. Servomotor - Algemene servomotor
Servomotor (servomotor), ook wel actuatormotor genoemd, kan de regelsnelheid en positienauwkeurigheid zeer nauwkeurig maken, kan het spanningssignaal omzetten in koppel en snelheid om het regelobject aan te drijven.
In tegenstelling tot de principestructuur van een stappenmotor, is een servomotor een standaard gelijkstroommotor of AC-inductiemotor, omdat het stuurcircuit buiten de motor wordt geplaatst en het motorgedeelte binnenin.
De servomotor is voor positionering afhankelijk van pulsen. Wanneer de servomotor 1 puls ontvangt, roteert deze over een hoek die overeenkomt met 1 puls.
Elke keer dat de motor een hoek draait, zendt de encoder het overeenkomstige aantal feedbackpulsen uit. De feedbackpulsen en de door de servodriver ontvangen pulsen vormen een closed-loop-besturing, zodat de servodriver de rotatie van de motor zeer nauwkeurig kan regelen om een nauwkeurige positionering te bereiken.
Servomotorbesturing: Over het algemeen worden servomotoren voor industrieel gebruik bestuurd door drie lussen, namelijk stroomlus, snelheidslus en positielus, die respectievelijk de hoekversnelling, hoeksnelheid en rotatiepositie van de motorwerking kunnen terugkoppelen.
De chip regelt de aandrijfstroom van elke fase van de motor via de feedback van de drie, zodat de snelheid en positie van de motor nauwkeurig volgens schema kunnen lopen.
AC-servo heeft het kenmerk van een constant koppel onder de nominale snelheid, gemeenschappelijke 200W, 400W lage en gemiddelde traagheid AC-servo nominaal toerental is 3000 tpm, de hoogste snelheid is 5000 tpm, hoge snelheid.
Het koppel is evenredig met de stroom, zodat het in de koppelmodus kan werken, zoals bij borgschroeven, drukklemmen en andere gelegenheden waarbij een constant koppel nodig is.
AC servo werkgeluid en trillingen zijn zeer klein, lage warmteontwikkeling.
Hetzelfde volume van de motortraagheid van de rotortraagheid is klein, de servotraagheid van 400 W is slechts gelijk aan de rotortraagheid van een 57 basis 2NM stappenmotor.
Servo heeft een kortstondige overbelastingscapaciteit, bij de selectie moet rekening worden gehouden met de overbelastingsvermenigvuldiger van de motor bij acceleratie en vertraging.
De servo maakt gebruik van closed-loop-besturing en heeft dezelfde positievolgfout als een closed-loop-stepper.
Servo vereist inbedrijfstelling vóór gebruik.
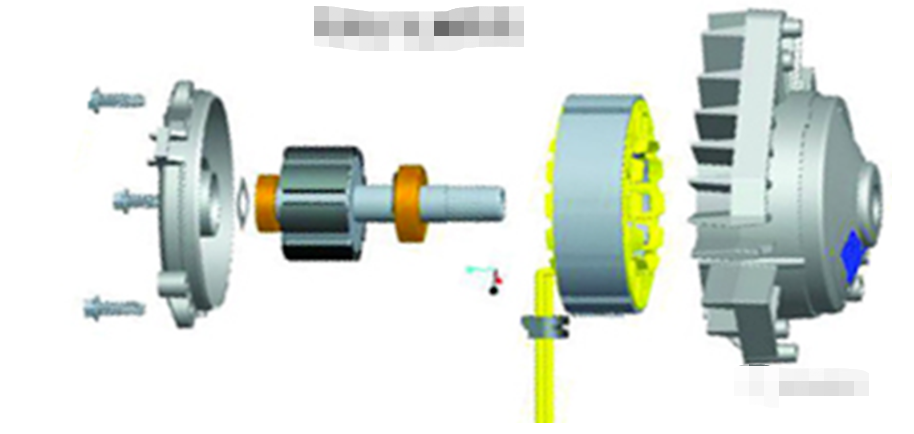
Het originele koppel van de stappen- en servomotor is niet genoeg, vaak moet je met het reductiemiddel werken, je kunt de reductietandwielset of planetaire reductiemiddel gebruiken.
6. Servomotor - servo
Servo is een klasse DC-servomotoren, eerst gebruikt voor kleine vliegtuigmodellen en nu gebruikt voor kleine robotgewrichten.
Uit de structurele analyse blijkt dat een servo bestaat uit een kleine gelijkstroommotor, plus sensoren, besturingschips en reductietandwielen, die in een geïntegreerde behuizing zijn gemonteerd.
Het is in staat om de rotatiehoek te regelen via een ingangssignaal (meestal een PWM-signaal, maar ook een digitaal signaal).
Omdat het een vereenvoudigde versie is, is de oorspronkelijke regeling van de servomotor met drie lussen vereenvoudigd tot één lus, d.w.z. dat alleen de positielus wordt gedetecteerd.
Een goedkope oplossing is een potentiometer, die wordt gedetecteerd door een weerstand, terwijl een geavanceerde oplossing een Hall-sensor of een encoder gebruikt.
Algemene servo's zijn goedkoop en compact, maar hebben een zeer lage nauwkeurigheid en een slecht positie-kalmeringsvermogen, en kunnen aan veel low-end behoeften voldoen.
Met de opkomst van kleine consumentenrobots in de afgelopen twee jaar zijn kleine en lichtgewicht servo's onmiddellijk de meest geschikte gezamenlijke componenten geworden.
Robotgewrichten vereisen echter veel hogere prestaties dan luchtservo's, en vereisen als commercieel product ook servo's van veel hogere kwaliteit dan doe-het-zelfspelers.
Welkom om meer informatie over elektromotoren met ons te delen in het opmerkingenveld!
Als u vragen heeft over de elektromotor, neem dan contact op met de professionele elektromotor fabrikant in China als volgt:

Dongchun Motor heeft een breed scala aan elektromotoren die worden gebruikt in verschillende industrieën, zoals transport, infrastructuur en bouw.
Ontvang snel antwoord.






