De 100.000 redenen voor elektromotoren... je moet een meester zijn als je ze allemaal kent!
▼Permanente magneetmotoren
▼ DC-motoren
▼Kwantummagneto
▼Eenfasige inductiemotoren
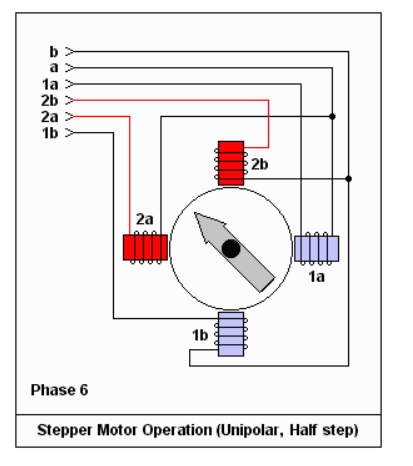
▼ Hoe stappenmotoren werken
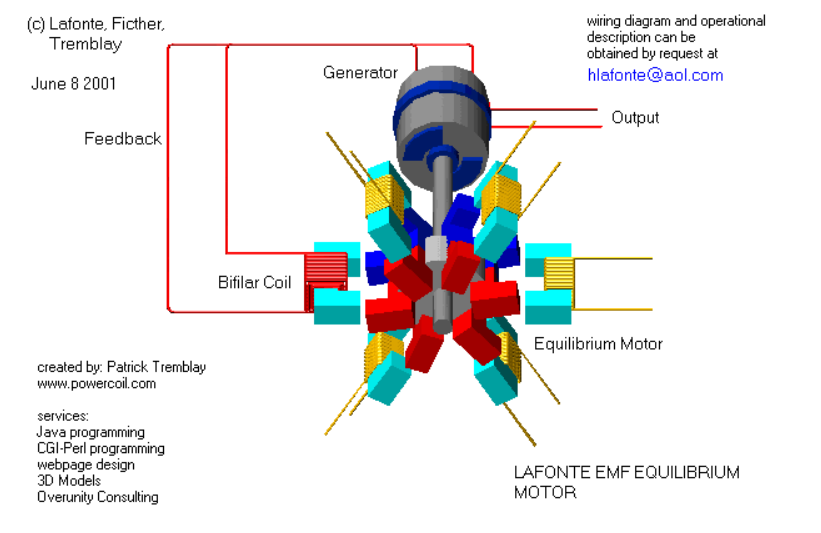
▼ Motoren balanceren
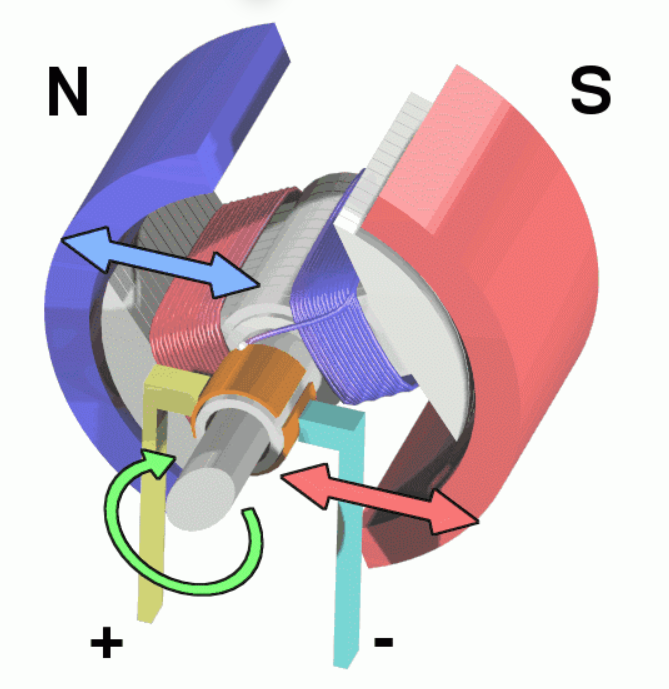
▼Het principe van huidige generatie
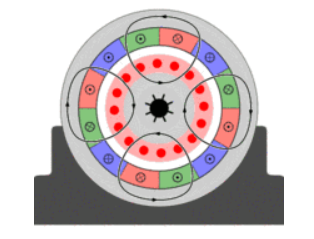
▼Driefasige stator
▼ Kleine elektromotoren
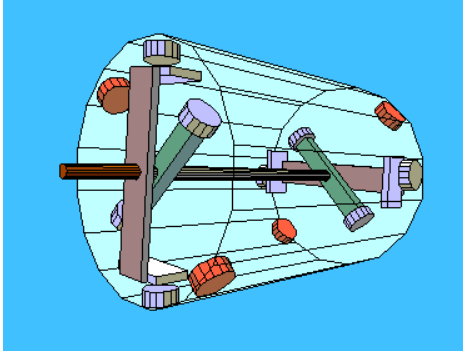
▼Motoruitgesneden weergave
▼Motoren
Vragen en antwoorden over de basisprincipes van elektromotoren
★Wat zijn elektromotoren?
A: Een elektromotor is een onderdeel dat elektrische energie van de accu omzet in mechanische energie om de wielen van een elektrisch voertuig te laten draaien.
★Wat bedoel je met opwinden?
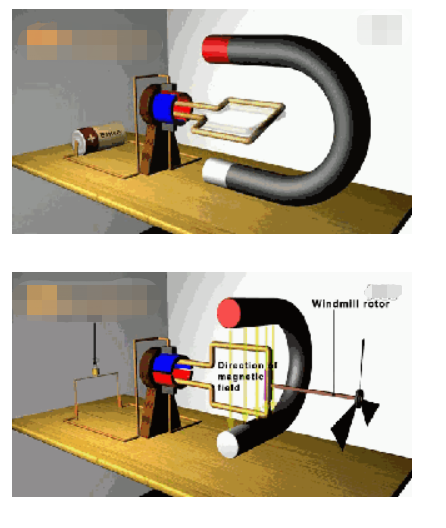
A: De ankerwikkeling is het kernonderdeel van DC-motoren en is een spoel die is omwonden met geëmailleerde koperdraad.
Wanneer de ankerwikkeling in het magnetische veld van de elektromotor wordt geroteerd, genereert dit allemaal een elektrische potentiaal.
★Wat wordt bedoeld met een magnetisch veld voor motortechnologie?
A: Het krachtveld dat optreedt rond een permanente magneet of stroom en de ruimte of het bereik van magnetische krachten die door elke magnetische kracht kunnen worden bereikt.
★Wat wordt bedoeld met magnetische veldsterkte?
A: De sterkte van het magnetische veld van een oneindig lange draad die een stroom van 1 ampère voert op een afstand van 1/2 m van de draad wordt gedefinieerd als 1 A/m (ampère/m, International System of Units SI);
in het CGS-systeem van eenheden (cm - g - sec) wordt de sterkte van het magnetische veld van een oneindig lange draad die een stroom van 1 ampère voert op een afstand van 0,2 cm van de draad gedefinieerd als 10e (Oostenrijks), 10e = 1/4,103/m, ter ere van Oostenrijkse bijdragen aan het elektromagnetisme, en de sterkte van het magnetische veld wordt gewoonlijk uitgedrukt als H.
★ Wat wordt bedoeld met de regel van Ampere?
A: Houd een draad in uw rechterhand, zodat de richting van uw gestrekte duim hetzelfde is als de richting van de gelijkstroom. Vervolgens is de richting die door uw gebogen vier vingers wordt aangegeven de richting van magnetische inductie rond de draad.
★Wat betekent magnetische flux?
A: Magnetische flux wordt ook wel magnetische flux genoemd: in een uniform magnetisch veld bevindt zich een vlak loodrecht op de richting van het magnetische veld, de magnetische inductiesterkte van het magnetische veld is B en het oppervlak van het vlak is S.
We definiëren het product van de magnetische inductiesterkte B en het gebied S als de magnetische flux over dit vlak.
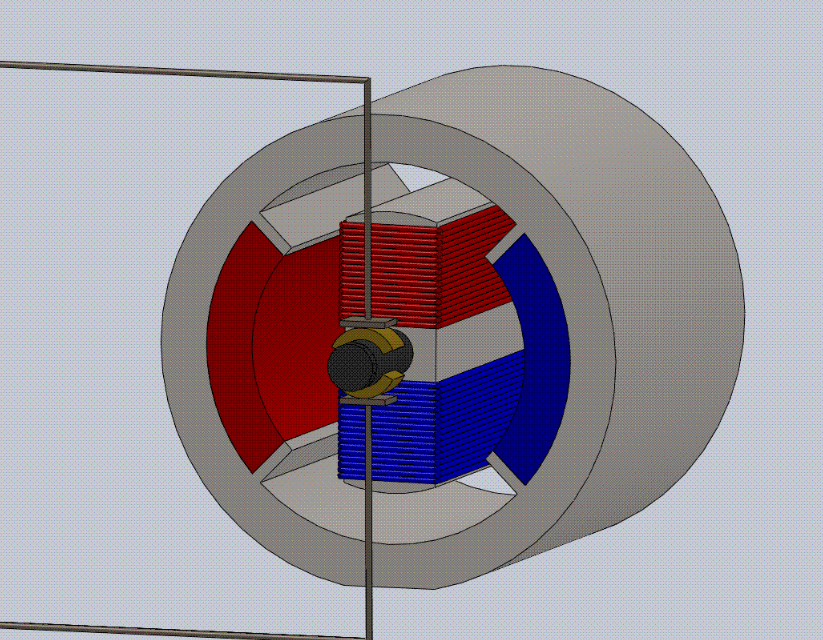
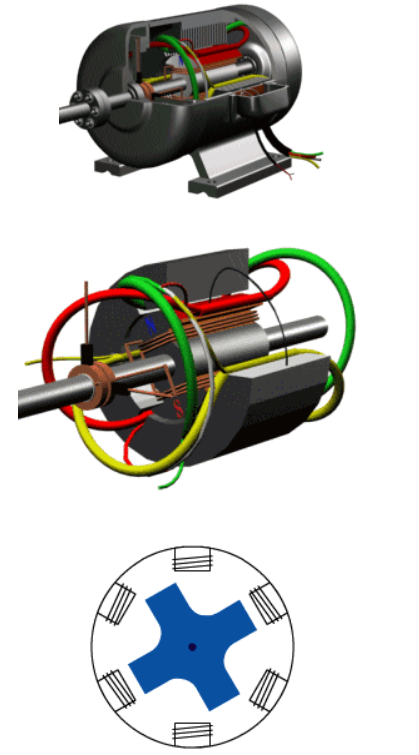
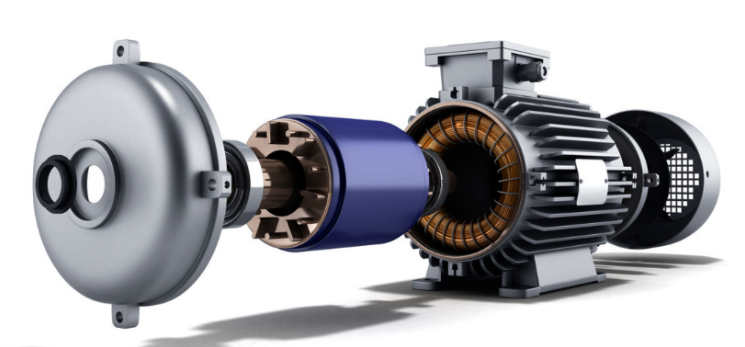
★Wat is een stator van een elektromotor?
A: Het deel van een geborstelde of borstelloze elektromotor dat niet draait wanneer deze in werking is.
De elektromotoras van een borstel- of borstelloze tandwielloze motor van het naaftype wordt de stator genoemd, en een dergelijke inductiemotor kan een interne statormotor worden genoemd.
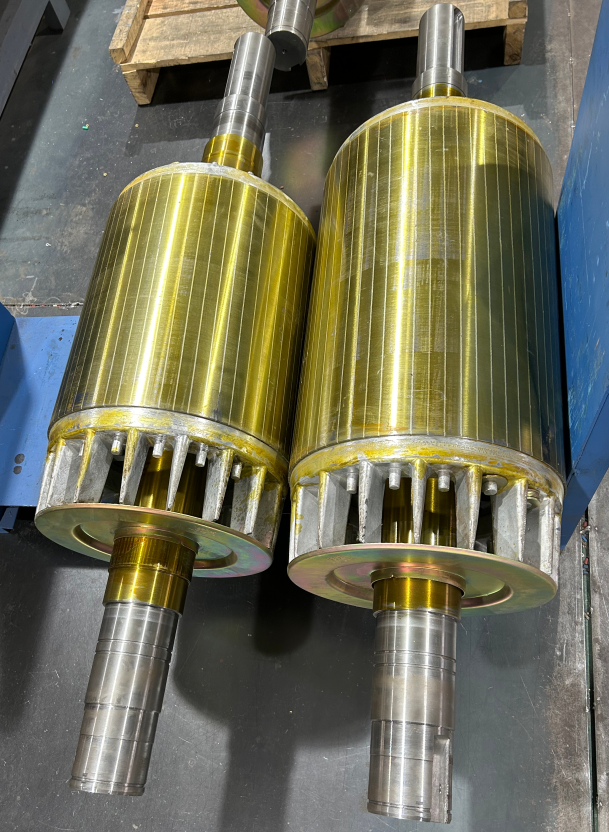
★Wat is een rotor van een elektromotor?
A: Het deel van een borstel- of borstelloze motor dat draait wanneer deze werkt.
De behuizing van een borstel van het naaftype of een borstelloze tandwielloze motor wordt een rotor genoemd, en een dergelijke elektromotor kan een externe rotormotor worden genoemd.
★Wat bedoel je met koolborstels?
A: Borstelmotor aan de bovenkant in het faseomzetteroppervlak, de motorrotatie, de elektrische energie door de faseomzetter naar de spoel, omdat het hoofdbestanddeel koolstof is, koolborstels genoemd, is het gemakkelijk te dragen.
Ze moeten regelmatig worden onderhouden en vervangen en ontdaan van koolstofophopingen.
★Wat is een borstelgreep?
A: De mechanische geleidegroef die de koolborstels op hun plaats houdt in een borstelmotor.
★Wat is een fasewisselaar?
A: Binnenin de borstelmotor bevindt zich een onderling geïsoleerd metalen oppervlak. Wanneer de rotor van de elektromotor draait, raakt de metalen strip afwisselend de positieve en negatieve polen van de borstels om afwisselend positieve en negatieve veranderingen in de richting van de industriële motorspoel te bereiken stroom en voltooi de faseverandering van de borstelmotorspoel.
★Wat is fasevolgorde?
A: De volgorde van plaatsing van borstelloze motorspoelen.
★Wat zijn magneten?
A: Magnetisch materiaal dat over het algemeen wordt gebruikt om een hoge magnetische veldsterkte op te roepen, elektrische automotoren worden gebruikt als neodymium-borium-zeldzame-aardmagneten.
★Wat is elektrisch potentieel?
A: Het wordt gegenereerd doordat de rotor van de motor de magnetische krachtlijnen doorsnijdt, en de richting ervan is tegengesteld aan de toegepaste voeding, dus het wordt tegen-elektromotorische kracht genoemd.
★Wat is een borstelmotor?
A: Wanneer de motor werkt, draaien de spoel en de commutator, de magneten en koolborstels draaien niet.
De afwisselende verandering van de richting van de spoelstroom wordt gedaan door de commutator en borstels die met de industriële motor roteren.
In de elektrische voertuigen zijn industriële borstelmotoren onderverdeeld in borstelmotoren met hoge snelheid en borstelmotoren met lage snelheid.
Er zijn veel verschillen tussen borstel- en borstelloze motoren, van het woord borstelmotoren hebben koolborstels en borstelloze motoren hebben geen koolborstels.
★Wat is een borstelmotor met laag toerental? Wat zijn de kenmerken?
A: In de elektrische voertuigindustrie is een borstelmotor met laag toerental een borstelloze gelijkstroommotor met laag toerental en hoog koppel van het naaftype.
Waarbij de relatieve snelheid van de motorstator en rotor de snelheid van het wiel is.
De magneten op de stator zijn 5 tot 7 paar en het aantal sleuven in het rotoranker is 39 tot 57.
Doordat de ankerwikkelingen in de wielkast zijn bevestigd, wordt de warmte eenvoudig afgevoerd door middel van de roterende behuizing.
De roterende behuizing is tevens geweven met 36 spaken, wat de warmteoverdracht vergemakkelijkt.
Het GIS-trainingsmicrosignaal is uw aandacht waard!
★Wat zijn de kenmerken van een geborstelde en getande motor?
A: Brush motors have brushes, and the main hidden problem is "brush wear".
Gebruikers moeten zich er dus van bewust zijn dat er twee soorten borstelmotoren zijn, met en zonder tanden.
It is a high speed motor, the so-called "tooth" is through the gear reduction mechanism, the motor speed will be lowered (because the national standard stipulates that the speed of electric vehicles should not exceed 20 kilometres per hour, so the motor speed should be about 170 revolutions per minute).
Omdat de motor wordt afgeremd door overbrenging, wordt deze gekenmerkt door een sterk startvermogen en een hoog klimvermogen.
De elektrische hub is echter gesloten en wordt pas gesmeerd voordat deze de fabriek verlaat, waardoor het voor gebruikers moeilijk is om dagelijks onderhoud uit te voeren. Bovendien zijn de tandwielen zelf onderhevig aan mechanische slijtage, en na ongeveer een jaar leidt onvoldoende smering tot verhoogde slijtage en geluid van de tandwielen, en neemt de stroom ook toe tijdens gebruik, wat de levensduur van de motor en de batterij beïnvloedt.
★Wat is een borstelloze motor?
Omdat de controller gelijkstroom levert in verschillende stroomrichtingen, worden afwisselende veranderingen in de richting van de spoelstroom in de industriële motor bereikt.
Borstelloze motoren hebben geen borstels of commutatoren tussen de rotor en de stator.
★Hoe bereiken de elektromotoren faseverandering?
A: Wanneer een borstelloze of borstelmotor draait, moet de richting van de bekrachtiging van de spoelen in de motor afwisselend veranderen, zodat de motor continu kan draaien.
De faseverandering van een borstelmotor wordt gedaan door de commutator en de borstels samen, terwijl een borstelloze motor wordt gedaan door de controller.
★Wat is faseverlies?
A: Eén fase in het driefasige circuit van een borstelloze motor of borstelloze controller werkt niet.
Faseverlies wordt onderverdeeld in hoofdfaseverlies en Hall-faseverlies. Het manifesteert zich doordat de motor trilt en niet werkt, of zwak en luidruchtig draait.
Het is gemakkelijk om de controller door te branden wanneer deze in faseverliestoestand werkt.
★Wat zijn de meest voorkomende soorten elektromotoren?
A: Veel voorkomende motoren zijn: geborstelde naafmotoren, geborstelde naafmotoren zonder tandwieloverbrenging, borstelloze naafmotoren met tandwieloverbrenging, borstelloze naafmotoren zonder tandwieloverbrenging, zijdelings opgehangen motoren, enz.
★Hoe onderscheid je het type elektromotor van motoren met hoge en lage snelheid?
A: A Geborstelde naafmotoren en borstelloze naafmotoren zijn hogesnelheidsmotoren.
B Geborstelde naafmotoren, borstelloze naafmotoren zijn motoren met een laag toerental.
★Hoe wordt het vermogen van een motor gedefinieerd?
A: Het vermogen van een motor is de verhouding tussen de mechanische energie die door de motor wordt geleverd en de elektrische energie die door de voeding wordt geleverd.
★Waarom zou ik het elektrisch vermogen van een motor kiezen? Wat is de betekenis van het selecteren van het vermogen van een motor?
A: De keuze van het motorvermogen is een zeer belangrijke en complexe kwestie.
Wanneer de belasting, als het nominale vermogen van de elektromotor te groot is, bevindt de elektromotor zich vaak in de modus voor lichte belasting.
The capacity of the motor itself does not fully play, into the "big horse-drawn car", while the motor operating efficiency is low, bad performance, will increase operating costs.
On the contrary, the rated power of the three phase motor is required to be small, that is, "small horse-drawn car", the motor current exceeds the rated current, the motor consumption increased, low efficiency is a small matter, the important thing is to affect the life of the motor.
Zelfs als de overbelasting niet groot is, zal de levensduur van de motor nog verder worden verkort; overbelasting meer, zal de isolatie van het isolatiemateriaal van de motor vernietigen of zelfs verbranden.
Natuurlijk is het nominale vermogen van de motorkrachtbron klein, het kan zijn dat deze de belasting helemaal niet kan slepen, waardoor de motor lang meegaat
De motor zal lange tijd in de starttoestand staan en zal oververhit en beschadigd raken.
Daarom moet het nominale vermogen van de motor strikt worden geselecteerd in overeenstemming met de bedrijfsomstandigheden van het elektrische voertuig.
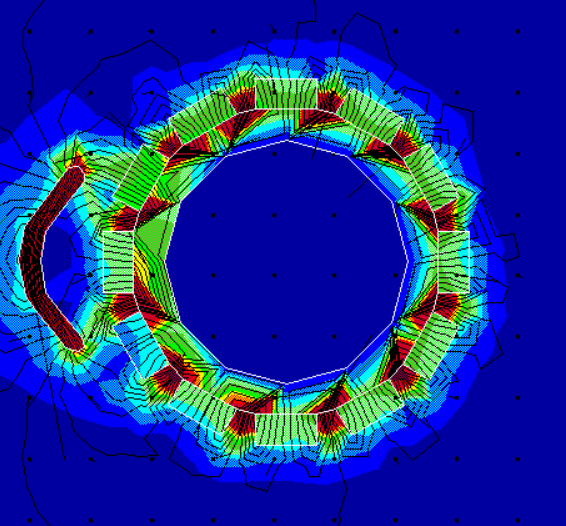
★Waarom hebben borstelloze DC-motoren over het algemeen drie hallen?
A: Kortom, om een borstelloze gelijkstroommotor te laten draaien, moet er altijd een bepaalde hoek zijn tussen het magnetische veld van de statorspoel en het magnetische veld van de permanente magneet van de rotor.
Het proces van rotorrotatie is ook het proces waarbij de richting van het magnetische veld van de rotor verandert. Om de hoek tussen de twee magnetische velden te maken, moet de richting van het magnetische veld van de statorspoel na een bepaald punt veranderen.
Dus hoe weet je dat de richting van het statorveld gaat veranderen?
Dat hangt af van de drie zalen.
Aangenomen kan worden dat de drie hallen de taak hebben om de verkeersleider te vertellen wanneer hij de richting van de stroom moet veranderen.
★Wat is bij benadering het bereik van het energieverbruik van een borstelloze motor Hall?
A: Het geschatte stroomverbruik van een borstelloze motor Hall varieert van 6mA tot 20mA.
★Hoe hoog kan een motor normaal gesproken werken? Wat is de maximale temperatuur die de motor kan verdragen?
A: Als de temperatuur van de laagspanningsmotorafdekking de omgevingstemperatuur met meer dan 25 graden overschrijdt.
Dit betekent dat de temperatuurstijging van de motor buiten het normale bereik ligt en dat de temperatuurstijging van de motor over het algemeen onder de 20 graden moet liggen.
Over het algemeen zijn motorspoelen gemaakt van geëmailleerde draad, en wanneer de temperatuur van de geëmailleerde draad hoger is dan 150 graden, zal de geëmailleerde film eraf vallen als gevolg van de hoge temperatuur, waardoor kortsluiting in de spoel ontstaat.
Wanneer de spoeltemperatuur boven de 150°C ligt, vertoont de motorbehuizing een temperatuur van rond de 100°C. Als de behuizingstemperatuur dus als basis wordt genomen, is de maximale temperatuur die de energiezuinige motor kan weerstaan 100°C.
★De temperatuur van de elektromotor moet lager zijn dan 20 graden Celsius?
dat wil zeggen dat de temperatuur van de eindafdekking van de elektromotor boven de omgevingstemperatuur lager moet zijn dan 20 graden Celsius, maar wat is de reden dat de elektromotor boven de 20 graden Celsius opwarmt?
A: De directe oorzaak van de opwarming van de elektrische motor wordt veroorzaakt door een hoge stroomsterkte.
Over het algemeen kan dit worden veroorzaakt door kortsluiting of open circuit van de spoel, demagnetisatie van de magneet of een laag rendement van de elektromotor, enz.
De normale situatie is dat de elektromotor lange tijd op hoge stroom draait.
★Waardoor wordt een motor warm? Wat is het proces?
A: Er zijn vermogensverliezen in de motor wanneer de elektromotor onder belasting draait, wat uiteindelijk in warmte zal veranderen, waardoor de motortemperatuur boven de omgevingstemperatuur zal stijgen.
De waarde van de motortemperatuur boven de omgevingstemperatuur wordt opwarmen genoemd.
Zodra de temperatuur stijgt, moet de elektromotor warmte afvoeren naar de omgeving; hoe hoger de temperatuur, hoe sneller de warmte wordt afgevoerd.
Wanneer de door de motoreenheid afgegeven warmte in de tijd gelijk is aan de gedissipeerde warmte, neemt de temperatuur van de elektromotor niet langer toe, maar handhaaft hij een stabiele en constante temperatuur, dat wil zeggen in een toestand van warmteontwikkeling en warmtedissipatie.
★ Wat is de algemeen toegestane temperatuurstijging? Welk deel van de motor wordt het meest beïnvloed door de temperatuurstijging van de elektromotor? Hoe wordt het gedefinieerd?
A: Wanneer de elektromotor onder belasting draait, geldt: hoe groter de belasting, d.w.z. hoe groter het uitgangsvermogen, hoe beter (als er geen rekening wordt gehouden met de mechanische sterkte).
Maar hoe hoger het elektrische uitgangsvermogen en hoe hoger het vermogensverlies, hoe hoger de temperatuur.
We weten dat het isolatiemateriaal, zoals de geëmailleerde draad, het zwakste onderdeel van de elektromotoren is om de temperatuur te weerstaan.
De temperatuurbestendigheid van isolatiemateriaal heeft een limiet. Binnen deze limiet zijn de fysieke, chemische, mechanische, elektrische en andere prestatieaspecten van isolatiemateriaal zeer stabiel, de levensduur is over het algemeen ongeveer 20 jaar.
Boven deze limiet zal de levensduur van het isolatiemateriaal sterk worden verkort of zelfs verbranden. Deze temperatuurgrens wordt de toegestane temperatuur van het isolatiemateriaal genoemd.
De toegestane temperatuur van het isolatiemateriaal is de toegestane temperatuur van de elektromotor; de levensduur van het isolatiemateriaal is doorgaans de levensduur van de elektromotoren.
De omgevingstemperatuur varieert met tijd en plaats, maar het ontwerp van de motor is gebaseerd op de standaard omgevingstemperatuur van 40 graden Celsius.
Daarom is de toegestane temperatuur van het isolatiemateriaal of de motor minus 40 graden Celsius de toegestane temperatuurstijging, de toegestane temperatuur van verschillende isolatiematerialen is niet hetzelfde, afhankelijk van de toegestane temperatuur zijn de gebruikelijke isolatiematerialen voor motoren A, E, B, F, H vijf. Volgens de omgevingstemperatuur van 40 graden Celsius.
Deze vijf soorten isolatiematerialen en hun toegestane temperatuur en temperatuurstijging worden weergegeven in de volgende tabel.
Kwaliteitsisolatiematerialen Toegestane temperatuur Toegestane temperatuurstijging
B Combinaties van mica, asbest en glasvezels met organische lakken met verbeterde hittebestendigheid als bindmiddel 130 90
F Mica-, asbest- en glasvezelsamenstellingen gebonden of geïmpregneerd met epoxyharsen met uitstekende hittebestendigheid 155 115
H Mica-, asbest- of glasvezelsamenstellingen gebonden of geïmpregneerd met siliconenhars, siliconenrubber 180 140
★ Hoe meet ik de fasehoek van borstelloze gelijkstroommotoren?
A: De fasehoek van een borstelloze motor kan worden gedetecteerd door de controller in te schakelen en de controller stroom te laten leveren aan het Hall-element.
De methode is als volgt: gebruik de +20V DC-spanningsklasse van de multimeter en sluit de rode pen aan op de +5V-lijn en de zwarte pen om respectievelijk de hoge en lage spanningen van de drie kabels te meten, afhankelijk van de faseverandering tabel van de 60 graden en 120 graden elektromotoren kunnen worden vergeleken.
★Waarom kunnen geen enkele DC-borstelloze controller en DC-borstelloze motor willekeurig worden aangesloten en normaal werken? Waarom is er een omgekeerde fasevolgorde in DC borstelloos?
A: Over het algemeen is de borstelloze gelijkstroommotor in daadwerkelijke beweging een proces van
De motor draait - de richting van het magnetische veld van de rotor verandert - wanneer de hoek tussen de richting van het magnetische veld van de stator en de richting van het magnetische veld van de rotor een elektrische hoek van 60 graden bereikt - het Hall-signaal verandert - De stroomrichting van de faselijn verandert - Het statorveld kruist 60 graden elektrische hoek naar voren --Statorveldrichting en rotorveldrichting staan onder een hoek van 120 graden elektrische hoek --De elektromotor blijft draaien.
We begrijpen dus dat er zes correcte toestanden van Hall zijn.
Wanneer een specifieke Hall de controller vertelt, heeft de controller een specifieke fase-uitgangsstatus.
Het omkeren van de fasevolgorde is dus het volbrengen van de taak om de elektrische hoek van de stator altijd in één richting te laten stappen onder een elektrische hoek van 60 graden.
★ Wat gebeurt er als een borstelloze controller van 60 graden wordt gebruikt op een borstelloze motor van 120 graden? En vice versa?
A: Beide zullen resulteren in faseverlies en zullen niet normaal roteren;
De door JENNER gebruikte controller is echter een intelligente borstelloze controller die automatisch 60 graden motoren of 120 graden elektromotoren kan identificeren, waardoor deze compatibel is met beide soorten elektromotoren en onderhoud en vervanging gemakkelijker wordt.
★Hoe kunnen de borstelloze DC-controller en de borstelloze DC-motor worden omgekeerd naar de juiste fasevolgorde?
A: De eerste stap is ervoor te zorgen dat de stroom- en aardedraden van de Hall-lijn zijn aangesloten op de overeenkomstige lijnen op de controller.
Hoewel de drie motor-Hall-lijnen en de drie motorlijnen in totaal 36 verbindingen met de controller hebben, is de eenvoudigste en domste methode om elke toestand één voor één te testen.
Bij het wijzigen van verbindingen kan dit zonder stroom gebeuren, maar moet voorzichtig zijn, maar ook in een bepaalde volgorde.
Pas op dat u niet elke keer te veel draait, als de motor niet soepel draait, dan is deze toestand niet goed, draai de draai te groot om de controller te beschadigen.
Als er een omkering van de situatie is, in het geval dat u de fasevolgorde van de controller kent, moet u de controller Hall-lijn a, c, kliklijn A-fase en B-fasewissel omwisselen, kan worden omgekeerd naar positieve rotatie.
De laatste verificatie van de juiste aansluitmethode is normaal als de motor op hoge stroom draait.
★Hoe kan ik een 60 graden motor besturen met een 120 graden borstelloze controller?
A: Voeg een richtingslijn toe tussen fase b van de Hall-signaallijn van de borstelloze motor en de bemonsteringssignaallijn van de controller.
★Wat is het intuïtieve verschil tussen een geborstelde hogesnelheidsmotor en een geborstelde lagesnelheidsmotor?
Antwoord.
A. Hogesnelheidsmotoren hebben een vrijloopkoppeling, waardoor het gemakkelijk is om in de ene richting te draaien en vermoeiend om in de andere richting te draaien; Elektromotoren met een laag toerental draaien de bakken net zo gemakkelijk in beide richtingen.
B. Motoren met een hoog toerental maken meer lawaai als de auto draait, terwijl elektromotoren met een laag toerental minder lawaai maken.
Ervaren mensen kunnen ze gemakkelijk op het gehoor identificeren.
★Wat is de nominale bedrijfsstatus van een motor?
A. Wanneer de motor draait en alle fysieke grootheden hetzelfde zijn als de nominale waarde, wordt dit de nominale bedrijfstoestand genoemd.
De elektromotor werkt onder nominale bedrijfsomstandigheden en kan betrouwbaar draaien en levert over het geheel genomen de beste prestaties.
★Hoe wordt het nominale koppel van de motor berekend?
A: Het nominale koppel op de klikas kan worden uitgedrukt als T2n, waarvan de grootte het mechanische vermogen van de uitgang is, gedeeld door de snelheidswaarde van de overdracht, d.w.z. T2n=Pn waarbij Pn in W is en Nn in r/min, T2n is in N.M, als PNM in KN is, wordt de factor 9,55 gewijzigd in 9550.
Daarom kan worden geconcludeerd dat als het nominale elektrische vermogen van de elektrische motoren gelijk is, hoe lager de snelheid van de meest gebruikte motoren, hoe groter het koppel.
★Wat is de definitie van de startstroom van AC-inductiemotoren?
A: Over het algemeen mag de startstroom van elektrische motoren niet hoger zijn dan 2-5 maal de nominale stroom, wat een belangrijke reden is waarom stroombegrenzende bescherming op de controller wordt toegepast.
★Waarom worden de snelheden van elektrische motoren op de markt steeds hoger? Wat zijn de implicaties?
A: Aan de kant van de leverancier kan de snelheid worden verhoogd om de kosten te verlagen, dezelfde motor met lage snelheid, spoelwindingen op hoge snelheid zullen minder zijn, maar ook siliciumstaal besparen, het aantal magneten is ook minder, de koper denkt dat hoge snelheid is goed.
De nominale snelheid werkt, het vermogen blijft hetzelfde, maar in de lagesnelheidszone, wanneer de efficiëntie duidelijk laag is, dat wil zeggen, machteloos starten.
Een laag rendement vereist een hoge startstroom en een hoge gelijkstroom tijdens het rijden, wat een hoge stroombegrenzing voor de controller vereist en niet goed is voor de batterij.
★Hoe kan ik de abnormale hittetoestand van de motor repareren?
A: De reparatiebehandeling bestaat meestal uit het vervangen van de elektromotor, of het uitvoeren van onderhoud.
★De nullaststroom van de elektromotor is groter dan de limietgegevens van de referentietabel geven aan dat de motor defect is. Wat zijn de oorzaken? Hoe repareren?
A: Klik op de interne mechanische wrijving; spoel lokale kortsluiting; magneet demagnetisatie; DC-motor fasewisselaar koolstofaccumulatie.
De reparatiebehandeling bestaat doorgaans uit het vervangen van de motor, of het vervangen van de koolborstel en het opruimen van de koolstofophoping.
★Wat is de maximale nullaststroom van verschillende motoren zonder fouten?
Type elektrische motor nominale spanning 24V nominale spanning 36V
Zijdelingse motor 2,2A 1,8A
Geborstelde hogesnelheidsmotor 1,7A 1,0A
Geborstelde motor met laag toerental 1,0A 0,6A
Hoge snelheid borstelloze motor 1,7A 1,0A
Borstelloze motor met laag toerental 1,0A 0,6A
★Hoe de stationairstroom van de elektromotor meten?
A: Plaats de multimeter in de 20A-positie en sluit de rode en zwarte meterpennen in serie aan op de stroomingang van de controller.
Schakel de stroom in en registreer op dit punt de maximale wisselstroom A1 van de multimeter zonder dat de motor draait.
Draai de hendel zo dat de motor langer dan 10 seconden zonder belasting op hoge snelheid draait, wacht tot het motortoerental is gestabiliseerd en begin op dit punt de maximale waarde van A2 op de multimeter te observeren en vast te leggen. Nullaststroom motor = A2-A1.
Vergelijking van veelgebruikte motoren voor elektrische voertuigen.
Vorm elektrische motor Aandrijfvorm Motorefficiëntie Klimprestaties Onderhoudscyclus Volume Onderhoudsinhoud Geluidskosten
Borstelloze tandloze borstelloze externe rotormotor met lage snelheid, directe aandrijving〉 80% Algemeen niet groot, niet klein laag.
Borstelloze, getande borstelloze motor met hoge snelheid, planetaire tandwielreductie〉 83% goed, ongeveer 3 jaar, klein gesmeerd tandwiel middelhoog.
geborstelde en getande hogesnelheidsborstelmotoren, 2-traps tandwielreductie < 78% goed ongeveer 1 jaar grote vervanging van koolborstels, gesmeerde tandwielen groot hoog
Borstelloze buitenrotormotor met lage snelheid, directe aandrijving 〈76% slecht 2 jaar of zo kleine vervanging van koolborstels, schone koolstof klein laag.
★ Hoe kan ik identificeren of de elektromotor goed of slecht is? Sleutel om te zien welke parameters?
A: Vooral de grootte van de nullaststroom en rijstroom, vergeleken met de normale waarde, en de energie-efficiëntie en het koppel van de motor, evenals het geluid, de trillingen en de hitte van de elektromotor. De beste manier is om een rollenbank te gebruiken om test de energie-efficiënte curve.
★ Wat is het verschil tussen motoren van 180 W en 250 W? Wat zijn de eisen voor de regelaar?
A: De 250W heeft een hoge rijstroom en vereist een hogere vermogensmarge en betrouwbaarheid van de controller.
★Waarom varieert de rijstroom van een elektrisch voertuig onder standaardomstandigheden, afhankelijk van het motorvermogen?
A: Het is bekend dat onder standaardomstandigheden, met een nominale belasting van 160 W, de rijstroom op een gelijkstroommotor van 250 W ongeveer 4 - 5 A bedraagt, terwijl bij een gelijkstroommotor van 350 W de rijstroom iets hoger is.
Als voorbeeld: als de accuspanning 48 V is en beide motoren 250 W en 350 W zijn met een nominaal rendement van 80%, dan is de nominale bedrijfsstroom voor een motor van 250 W ongeveer 6,5 A en voor een motor van 350 W ongeveer 9 A.
Het algemene efficiëntiepunt van een motor is dat hoe verder de bedrijfsstroom afwijkt van de nominale bedrijfsstroom, hoe kleiner de waarde, en bij een belasting van 4 - 5A is het rendement van een 250W-motor 70% en dat van een 350W-motor is 60%, daarna bij een belasting van 5A
Het uitgangsvermogen van 250W is 48V*5A*70%=168W
Het uitgangsvermogen van 350W is 48V*5A*60%=144W
De motor van 350 W moet zijn stroomtoevoer vergroten om te voldoen aan de vereiste uitgangsvermogen van 168 W (wat bijna de nominale belasting is), waardoor het efficiëntiepunt toeneemt.
Waarom is het bereik van een motor van 350 W korter dan dat van een motor van 250 W in dezelfde omgeving?
A: Het bereik van een motor van 350 W is kleiner dan die van een elektromotor van 250 W in dezelfde omgeving vanwege de hoge rij-elektriciteitsstroom.
★Hoe moeten fabrikanten van elektrische fietsen een motor voor elektrische auto's kiezen? Volgens wat de uitverkorenen moeten kiezenric-motor?
A: De meest kritische factor voor elektrische fietsen is de keuze van het motorvermogen.
De selectie van het motorvermogen is over het algemeen verdeeld in drie stappen.
De eerste stap is het berekenen van het belastingsvermogen P
Stap twee, afhankelijk van de elektronica van het belastingsvermogen, selecteert u vooraf het motorvermogen en andere.
In de derde stap wordt de vooraf geselecteerde motor gekalibreerd.
Normaal gesproken wordt eerst de stijging van de verwarmingstemperatuur gecontroleerd, daarna het overbelastingsvermogen en, indien nodig, het startvermogen.
Als alles is geslaagd, wordt de vooraf geselecteerde motor geselecteerd; kan niet overgaan van de tweede stap om opnieuw uit te voeren, totdat hij is geslaagd.
Het is belangrijk dat het nominale vermogen van de motor zo klein mogelijk is om aan de eisen van de belasting te voldoen.
Nadat de tweede stap is uitgevoerd, wordt de temperatuur gecorrigeerd op basis van de omgevingstemperatuur. Het vermogen is gebaseerd op de nationale standaard omgevingstemperatuur van 40 graden Celsius.
Als de omgevingstemperatuur het hele jaar door laag of hoog is, moet het nominale vermogen van de motor worden gecorrigeerd om in de toekomst het motorvermogen volledig te kunnen benutten.
Als de omgevingstemperatuur bijvoorbeeld het hele jaar door laag is, moet het werkelijke nominale vermogen van de elektromotor hoger zijn dan de standaard Pn, en omgekeerd, als de omgevingstemperatuur het hele jaar door hoog is, moet het nominale vermogen worden verlaagd voor gebruik. .
In het algemeen moet bij het bepalen van de omgevingstemperatuur de keuze van de motor van een elektrisch voertuig gebaseerd zijn op de rijtoestand van het elektrische voertuig.
Hoe meer de rijtoestand van het elektrische voertuig de motor dicht bij de nominale werktoestand kan brengen, hoe beter, en de rijtoestand van het elektrische voertuig is over het algemeen gebaseerd op de wegomstandigheden.
Als het wegdek in Plains glad is, is een motor met laag vermogen voldoende; Als er een motor met een hoger vermogen wordt gebruikt, zal dit energieverspilling veroorzaken en een korte actieradius tot gevolg hebben.
Als er in de Hooglanden veel bergachtige wegen zijn, is een motor met variabele frequentie en een hoger vermogen geschikt.
★ Een borstelloze DC-motor van 60 graden is krachtiger dan een borstelloze DC-motor van 120 graden, toch? Waarom?
A: Vanuit de markt hebben we ontdekt dat er bij de communicatie met veel klanten een veelvoorkomende misvatting bestaat!
Ze denken dat een 60 graden motor krachtiger is dan een 120 graden motor.
Wij denken dat dit waarschijnlijk een soort propaganda is van de fabrikanten van 60 graden borstelloze motoren. Het principe van de borstelloze motor en het feit dat het een 60 graden motor of een 120 graden motor is!
De zogenaamde graden worden alleen gebruikt om de borstelloze controller te vertellen wanneer hij de twee fasedraden moet inschakelen die in zijn hoofd zitten. Er bestaat niet zoiets als wie machtiger is dan de ander! Hetzelfde geldt voor 240 graden en 300 graden motoren, er bestaat niet zoiets als wie krachtiger is dan de ander.
Welkom om meer informatie over elektromotoren met ons te delen in het opmerkingenveld!
Als u vragen heeft over de elektromotor, neem dan contact op met de professionele elektromotor fabrikant in China als volgt:
 Doorgaan naar artikel
Doorgaan naar artikel