 အကြောင်းအရာသို့ ကျော်သွားပါ။
အကြောင်းအရာသို့ ကျော်သွားပါ။ 
Stator တပ်ဆင်မှု
ကျွန်ုပ်တို့၏လျှပ်စစ်မော်တာစက်ရုံအများစုသည် ပြင်ပစာနယ်ဇင်းတပ်ဆင်ခြင်းလုပ်ငန်းစဉ်ကို အသုံးပြု၍ အသေးစားမော်တာများကို ထုတ်လုပ်ပါသည်။
ငုပ်ပြီးဖုတ်ပြီးနောက် မြှုပ်ထားသောမျဉ်းရှိ stator core ကိုထိုင်ခုံထဲသို့ဖိပြီး ပုံ၏လိုအပ်ချက်များနှင့်လိုက်လျောညီထွေဖြစ်စေရန် axial အနေအထားကိုသေချာစေရမည်။
မဟုတ်ပါက ကွိုင်၏အဆုံးတစ်ဖက်ကို အလွန်အကျွံဆန့်ထုတ်နိုင်ပြီး စုစုပေါင်းတပ်ဆင်ရခက်ခဲစေကာ လျှပ်စစ်မော်တာလေထုကွာဟချက် သံလိုက်ဓာတ်အား တိုးလာစေပြီး လျှပ်စစ်မော်တာ၏စွမ်းဆောင်ရည်ကို ထိခိုက်စေမည်ဖြစ်သည်။
၎င်းသည် လျှပ်စစ်မော်တာများ၏ ရဟတ်များတွင် axial force ကိုလည်း တိုးစေမည်ဖြစ်သည်။
အိမ်ရာရှိ stator core ၏ axial အနေအထားကို press-fit tyre tool တွင် ယေဘူယျအားဖြင့် သေချာစေပါသည်။

Press-fitting ပြီးနောက် core ၏ အနေအထားသည် ပုံ၏ လိုအပ်ချက်များနှင့်အညီ ဖိအားထုပ်၏ အရွယ်အစားကို ထိန်းချုပ်ထားသည်။
အိမ်ရာအတွင်း stator core မလှည့်ကြောင်းသေချာစေရန်၊ အိမ်ရာအတွင်းစက်ဝိုင်းနှင့် stator core ၏အပြင်ဘက်စက်ဝိုင်းကြားအဆက်အသွယ်သည်မလုံလောက်သောကြောင့်၊ လျှပ်စစ်မော်တာတစ်ခုစီတိုင်းကိုလုံးဝပြုပြင်ရန် stop screw နှင့်လည်းတပ်ဆင်ထားသည်။ အိမ်ရာအတွင်းရှိ core ။
Rotor တပ်ဆင်ခြင်း။
asynchronous motor တစ်ခု၏ ရဟတ်တပ်ဆင်မှုတွင် rotor core နှင့် shaft ၏ စုဝေးမှု၊ bearings များ စုဝေးမှုနှင့် fan များ ပါဝင်သည်။
၎င်းသည် လျှပ်စစ်မော်တာ ထုတ်လုပ်မှု၏ အဓိက အစိတ်အပိုင်းဖြစ်သည်။
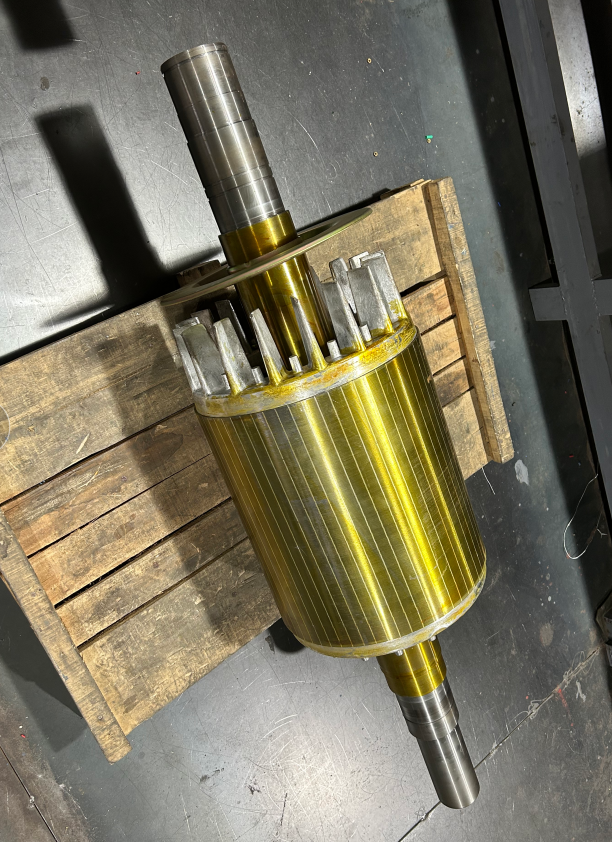
rotor core နှင့် shaft ၏ စည်းဝေးပွဲ
လျှပ်စစ်မော်တာလည်ပတ်နေချိန်တွင် စက်ပိုင်းဆိုင်ရာပါဝါသည် ရဟတ်ရှပ်မှတဆင့် အထွက်ရှိသောကြောင့် ရဟတ်အူတိုင်နှင့် ရိုးတံပေါင်းစပ်ခြင်း၏ ယုံကြည်စိတ်ချရမှုသည် အလွန်အရေးကြီးပါသည်။
ရဟတ်၏အပြင်ဘက်အချင်း 300 မီလီမီတာထက်နည်းသောအခါ၊ ရဟတ်အူတိုင်ကို ပုံမှန်အားဖြင့် ရဟတ်ရှပ်ပေါ်သို့ တိုက်ရိုက်ဖိသည်၊ rotor ၏ အပြင်ဘက်အချင်းသည် 300mm မှ 400mm ထက်ကြီးသောအခါ။
ရဟတ်ကွင်းကို ဦးစွာ အူတိုင်ထဲသို့ ဖိထားပြီး၊ ထို့နောက် ရဟတ်ရှပ်ကို ရဟတ်ကွင်းထဲသို့ ဖိထားသည်။
Y စီးရီးလျှပ်စစ်မော်တာများသည် ထုတ်လုပ်သူအများစုထံမှ ရဟတ်ရိုးပေါ်သို့ တိုက်ရိုက်ဖိသည့် ဖွဲ့စည်းပုံကို လက်ခံသည်။
ထုတ်လုပ်မှုလိုင်းပေါ်ရှိ ရဟတ်အူတိုင်နှင့် ရှပ်ကြားတွင် အခြေခံဖွဲ့စည်းပုံသုံးမျိုးရှိသည်- knurled cold press fit၊ hot sleeve fit နှင့် key connection fit တို့ဖြစ်သည်။

Knurling cold press fit knurling cold press fit တွင်၊ shaft processing process မှာ- core file ကို ကြိတ်ပြီး ကြိတ်ကာ၊ ထို့နောက် rotor core ထဲသို့ ဖိကာ၊ ကြိတ်ရှပ် extension ကို အပြီးသတ်ခြင်း၊ bearing file နှင့် core ၏ အပြင်ဘက် စက်ဝိုင်းကို ပြီးခြင်း .
knurling လုပ်ငန်းစဉ်ကိုအသုံးပြုသောအခါ၊ အလွန်အကျွံဝင်ရောက်စွက်ဖက်ခြင်းကိုလည်းခွင့်မပြုပါ။
အအေးဖိအားပေးသည့် အရွယ်အစားသည် အနှောင့်အယှက်ပမာဏနှင့် အချိုးကျသောကြောင့်၊ အနှောင့်အယှက်ပမာဏ များလွန်းသောအခါ၊ ၎င်းကို ဖိမခံရနိုင်၊ သို့မဟုတ် အလွန်အကျွံ အတွင်းစိတ်ဖိစီးမှုကြောင့် ပစ္စည်းသည် ပုံပျက်သွားခြင်း သို့မဟုတ် ပျက်စီးသွားနိုင်သည်။
ယေဘူယျအားဖြင့် ကာစ်အလူမီနီယမ်ရဟတ် (သို့မဟုတ် ရဟတ်ကို ပြန်အပူပေးခြင်းဖြင့်) ပူသောလက်စွပ်ကို ယေဘုယျအားဖြင့် လုပ်ဆောင်သည်။
ပူသောလက်စွပ်လုပ်ငန်းစဉ်သည် အအေးခံကိရိယာများကို သက်သာစေပြီး ရဟတ်အူတိုင်နှင့် ရှပ်ပေါင်းစပ်မှုသည် ပိုမိုစိတ်ချရသည်။
ပေါင်းစည်းမှုကို ချဲ့ထွင်ပြီးနောက် အအေးခံရန်အတွက် ပူသောလက်စွပ်ကို အပူပေးထားသည့်အတွက်၊ ပါဝင်မှု၏အပေါက်သည် ပါဝင်မှုအား ထိန်းထားရန် ကျဉ်းသွားကာ လုံလောက်သော စွက်ဖက်မှုတန်ဖိုးများနှင့် မြင့်မားသော ယုံကြည်စိတ်ချရမှုကို သေချာစေသည်။
သော့ချိတ်ဆက်မှု၏ အားသာချက်မှာ ချိတ်ဆက်မှု၏ ယုံကြည်စိတ်ချရမှုကို သေချာစေပြီး စီးဆင်းမှုဆိုင်ရာ အဖွဲ့အစည်းကို လွယ်ကူချောမွေ့စေခြင်း ဖြစ်သည်။
အားနည်းချက်မှာ ပြုပြင်ခြင်းလုပ်ငန်းစဉ် တိုးလာပြီး ရှပ်ရှိ သော့လမ်းကြောင်းသည် အထူးသဖြင့် လျှပ်စစ်မော်တာငယ်များတွင် ရှပ်၏ ကြံ့ခိုင်မှုကို လျော့နည်းစေသည်။
သော့ချိတ်ဆက်မှုကိုအသုံးပြုသောအခါ၊ သတ်မှတ်ထားသောလိုအပ်ချက်များနှင့်အညီ သော့၏အကျယ်ကို ရွေးချယ်သည်။
လုပ်ငန်းစဉ်ကို ရိုးရှင်းစေရန်အတွက်၊ လျှပ်စစ်စက်များအတွက် shaft extension ဖြင့် တူညီသော keyway width ကို အသုံးပြုနိုင်သည်။
စေ့စေ့စပ်စပ်
အသေးစားနှင့် အလတ်စား အပြိုင်အဆိုင် မော်တာများတွင် rolling bearing တည်ဆောက်မှုကို တွင်ကျယ်စွာ အသုံးပြုသည်။ ၎င်းတို့သည် ရိုးရိုး bearings များထက် ပိုမိုပေါ့ပါးပြီး လည်ပတ်နေစဉ်အတွင်း မကြာခဏ ပြုပြင်ထိန်းသိမ်းရန် လိုအပ်ပြီး ချောဆီနှင့် ဆီစားသုံးမှု နည်းပါးသည်။
တစ်ချိန်တည်းမှာပင်၊ rolling bearings သည် သေးငယ်သော radial clearance ရှိပြီး လေဝင်ပေါက်အနည်းငယ်ရှိသော asynchronous motors များအတွက် ပိုမိုသင့်လျော်ပါသည်။

အထွေထွေညီလာခံ
အသေးစားနှင့် အလတ်စား မော်တာများ၏ စုစုပေါင်း တပ်ဆင်မှုတွင် stator အတွင်းသို့ ရဟတ်တပ်ဆင်ခြင်း၊ အဆုံးထုပ်များ၊ လမ်းဆုံသေတ္တာများ၊ ပြင်ပပန်ကာများနှင့် ဘရပ်ရှကိရိယာများ စသည်တို့ကဲ့သို့သော အခြားသော အစိတ်အပိုင်းများ တပ်ဆင်ခြင်းတို့ ပါဝင်ပါသည်။
စုစုပေါင်းတပ်ဆင်ပြီးနောက်၊ မော်တာ၏အပြင်ပိုင်းအချောထည်များကိုစမ်းသပ်မှုများပြုလုပ်ရန်လည်းလိုအပ်သည်။
လျှပ်စစ်မော်တာထုတ်လုပ်မှုအတွက် ရဟတ်ကို stator အဖြစ် အထွေထွေ တပ်ဆင်ခြင်း။
stator ထဲသို့ ရဟတ်ကို ပတ်ထားခြင်းသည် အရေးကြီးသော လုပ်ငန်းစဉ်များထဲမှ တစ်ခုဖြစ်သည်။
မမှန်ကန်သော လုပ်ဆောင်ချက်သည် အကွေ့အကောက်များ အလွယ်တကူ ပျက်စီးစေပြီး တစ်ခါတစ်ရံ ရဟတ်ရှပ်၏ ပုံပျက်ခြင်းပင် ဖြစ်စေနိုင်သည်။
ရဟတ်ကိုထည့်သွင်းသောအခါ၊ shaft extension နှင့် junction box ၏သက်ဆိုင်ရာအနေအထားကိုအာရုံစိုက်ရန်လိုအပ်သည်။
ရဟတ်၏ထုထည်သည် 35 ကီလိုဂရမ်ထက်နည်းပါက၊ ၎င်းကို stator ထဲသို့လက်ဖြင့်ထည့်နိုင်သည်။
ပိုကြီးသော ရဟတ်များအတွက်၊ lifting tools များ လိုအပ်ပါသည်။
လည်ပတ်နေသည်၊ ဦးစွာ lifting ring 2 တွင် tool ကို ရုတ်သိမ်းလိုက်ပြီး rotor shaft ပေါ်တွင် တင်ပြီးနောက် rotor ကို lifting ring 1 တွင် မြှောက်ကာ rotor သည် stator အတွင်းသို့ အလျားလိုက် ချောမွေ့စွာ ထိုးဖောက်ဝင်ရောက်နိုင်စေရန် lever 3 ကို ကိုင်ထားပါ။
အဆုံးအဖုံးတပ်ဆင်ခြင်း။
အဆုံးအဖုံးကို တပ်ဆင်သည့်အခါ၊ ယေဘုယျအားဖြင့် axle မဟုတ်သော extension end ကို ဦးစွာ ထည့်သွင်းပါ။
ပါးစပ်အစိတ်အပိုင်းကို သံချေးတက်ခြင်းမှ ကာကွယ်ရန် ပရိဘောဂရပ်သည့် မျက်နှာပြင်ပေါ်တွင် ဆီပါးလွှာသော အလွှာကို လိမ်းပါ။
အဆုံးအဖုံးကို တပ်ဆင်ပြီးနောက်၊ အဖုံးနှင့် ထိုင်ခုံ၏ အဆုံးမျက်နှာကို တင်းကျပ်စေရန် အဆုံးအဖုံးပတ်ပတ်လည်ကို နှိပ်ပါ၊ ထို့နောက် ဘောင်များကို ထောင့်ဖြတ်အလှည့်တွင် တင်းကျပ်ပါ။
ဒုတိယအဖုံးကို တပ်ဆင်သည့်အခါ ရဟတ်ကို အပြားလိုက် မြှောက်ထားရန် လိုအပ်သည် (မော်တာငယ်ကို ရုတ်သိမ်း၍မရပါ)၊ ထို့နောက် အဖုံးကို တွဲခေါက်ပြီး ကျည်ကို တင်းကျပ်ပါ။
အကယ်၍ အစွန်းနှစ်ဖက်ကို မတူညီသော axes ဖြင့် တပ်ဆင်ထားပါက သို့မဟုတ် အဆုံးမျက်နှာပြင်များသည် အပြိုင်မဟုတ်ပါက၊ ရဟတ်သည် ရပ်တန့်သွားတတ်သည်၊ သို့မှသာ မတူညီသော axes များကို ဆန့်ကျင်သည့်ဖြစ်စဉ်ကို ဖယ်ရှားပစ်ရန် သံတူဖြင့် ခေါက်ရန် လိုအပ်ပါသည်။ rotor သည် လိုက်လျောညီထွေ လှည့်ပတ်သည်။
ထို့နောက် အပြင်ဘက် ဝက်ဝံအဖုံးကို တပ်ဆင်ပါ၊ ဝက်ဝံအဖုံး ဝက်အူများကို တင်းကျပ်ပါ။

လေကွာဟမှုကို ချိန်ညှိခြင်း။
အလတ်စား မော်တာ၏ လှည့်ပတ်ထားသော အဖုံးတစ်ခုလုံးအတွက်၊ ရဟတ်ကို stator ထဲသို့ ထည့်သွင်းသောအခါ၊ ဘော်လုံး bearing end ၏ အဆုံးအဖုံးကို ဦးစွာ တပ်ဆင်သင့်သည်၊ ထို့နောက် roller bearing end ၏ အဆုံးအဖုံးကို တပ်ဆင်သင့်သည်။ rolling bearing မပျက်စီးအောင် ကာကွယ်ပါ။
ball bearing end ၏ အဆုံးအဖုံးကို ဦးစွာတပ်ဆင်ရမည်ဖြစ်ပြီး၊ အဆုံးအဖုံးဝက်အူကို မတင်းကြပ်သင့်ပါ၊ ဘောလုံးအဆုံးအဖုံးကို တပ်ဆင်ပြီးနောက် ဝက်အူကို တင်းကျပ်ပါ။
အဆုံးအဖုံးကို တပ်ဆင်ပြီးနောက် လေကွာဟချက်ကို ချိန်ညှိရန်။
ချိန်ညှိမှုနည်းလမ်းမှာ အဆုံးအဖုံး၏ နှိုင်းရအနေအထားကို ချိန်ညှိရန် jack (အစွန်းနှစ်ဖက်တွင် လေးခု) ကို အသုံးပြုရန်ဖြစ်သည်။
စံ၏နည်းပညာဆိုင်ရာအခြေအနေများနှင့်အညီ လေကွာဟချက်တူညီမှုမညီမချင်း တိုင်းတာခြင်းအတွက် 120. ပလပ်တံကို အသုံးပြုပါ။ (အစွန်းနှစ်ဖက်) အနေအထား၊
လေကွာဟချက်ကို ချိန်ညှိပြီးနောက် ဝက်အူချိတ်ကို အလျားလိုက် အပေါက်ဖောက်ခြင်းစက်တွင် ပုံဆွဲတူးဖော်ခြင်း ဖက်ထုပ်နေရာချထားခြင်း pin hole ၏တည်နေရာအရ အလျားလိုက် အပေါက်ဖောက်ခြင်းနှင့် လူများနေရာချထားခြင်း pin ကိုဖွင့်ပါ။

ပါဝါအီလက်ထရွန်းနစ်ပစ္စည်းများတွင် ဘရပ်ရှ်စနစ် တပ်ဆင်ခြင်း။
လျှပ်စစ်မော်တာတွင် စလစ်ကွင်းဆက်သွယ်မှု (ဥပမာ ကြီးမားပြီး အလတ်စား အကွေ့အကောက်များသော ရဟတ်အပျက်အစီးများကဲ့သို့)။
စုတ်တံတပ်ဆင်ခြင်း၏အရည်အသွေးသည် conduction ၏အခြေအနေအပေါ်ကြီးမားသောအကျိုးသက်ရောက်မှုရှိသည်; commutator ဖြင့် မော်တာတွင်၊ အခြေအနေ၏ ရွေ့လျားမှုသည် ကောင်းသည် သို့မဟုတ် ဆိုးသည်၊ မကြာခဏဆိုသလို ဘရပ်ရှစနစ် တပ်ဆင်မှု အရည်အသွေးနှင့် ဆက်စပ်နေသည်။
collector ring နှင့် commutator အတွက် brush များသည် ယေဘူယျအားဖြင့် electrochemical graphite brushes နှင့် metal graphite brushes များဖြစ်သည်။
Electrochemical graphite brush သည် အညစ်အကြေးများကို ဖယ်ရှားပြီးနောက် သန့်စင်ရန်အတွက် သဘာဝဂရပ်ဖိုက်ဖြင့် ပြုလုပ်ထားသည်။
ကုန်ကြမ်းများ၏ မတူညီသောအချိုးအစားအရ ၎င်းကို ဂရပ်ဖိုက်အခြေခံ၊ coke-based နှင့် carbon-black-based ဟူ၍ ခွဲခြားနိုင်သည်။
ကာဗွန်အနက်ရောင်အခြေခံ ဘရိတ်များသည် ခံနိုင်ရည်အားပိုကောင်းပြီး အဆက်အသွယ်ဗို့အားကျဆင်းမှု မြင့်မားပြီး ရွေ့လျားမှုခက်ခဲသော မော်တာများအတွက် သင့်လျော်ပါသည်။ ဂရပ်ဖိုက်အခြေခံ ဘရပ်စ်များကို သာမန်မော်တာများတွင် အသုံးများသည်။

Electroplated graphite စုတ်တံများသည် မာကျောမှုနည်းပြီး ဝတ်ဆင်မှုနှေးကွေးကာ လက်ရှိသိပ်သည်းဆသည် ယေဘူယျအားဖြင့် 10-12A1cm2 တွင်ရနိုင်သည်။ သတ္တုဂရပ်ဖိုက်စုတ်တံများသည် ဗို့အားနိမ့်၊ မြင့်မားသော မော်တာများအတွက် သင့်လျော်သည်၊ ၎င်းကို ဂရပ်ဖိုက်တွင် ကြေးနီမှုန့် 40% -50% ပေါင်းထည့်ခြင်းဖြင့် သန့်စင်စေသည်။
၎င်းတွင် မြင့်မားသောသိပ်သည်းဆ၊ မာကျောမှုနည်းသော၊ ဝတ်ဆင်မှုနည်းပါးသောကိန်းဂဏန်း၊ ခံနိုင်ရည်နည်းသောကိန်းဂဏန်း၊ ထိတွေ့မှုဖိအားကျဆင်းမှု၊ နှေးကွေးသောဝတ်ဆင်မှုနှင့် လက်ရှိသိပ်သည်းဆတို့ကို ယေဘုယျအားဖြင့် 17-20A/cm2 တွင် ရရှိနိုင်သည်။
DC မော်တာတွင် Brush အစီအစဉ်သည် အပြုသဘောနှင့် အနုတ်လက္ခဏာဆောင်သော ကွန်မြူတာတာ ဝတ်ဆင်မှုဒီဂရီအောက်ရှိ အပြုသဘောဆောင်သော စုတ်တံများတွင် ကွဲလွဲနေသောကြောင့် စုတ်တံစီစဉ်မှုအနေအထား၏ ကျိုးကြောင်းဆီလျော်သော အစီအစဉ်ဖြစ်ရပါမည်။
စုတ်တံများကို ကွန်မြူတာ မျက်နှာပြင်ပေါ်တွင် တုန်ယင်နေသင့်သည်။

လျှပ်စစ်ရထားများအတွက် အသေးစား မော်တာတပ်ဆင်မှု အလိုအလျောက်စနစ်
လုပ်သားကုန်ထုတ်စွမ်းအားမြှင့်တင်ရန်၊ ထုတ်လုပ်မှုကုန်ကျစရိတ်ကို လျှော့ချရန်၊ ထုတ်ကုန်များ၏ စျေးကွက်ယှဉ်ပြိုင်နိုင်စွမ်းကို မြှင့်တင်ရန်အတွက် ထုတ်ကုန်ဖွံ့ဖြိုးတိုးတက်မှု သို့မဟုတ် ထုတ်လုပ်မှုစက်ဝန်းကို အတိုချုံးချုပ်ရန်။ ပြည်တွင်းပြည်ပ မော်တော်ယာဥ်လုပ်ငန်းသည် မော်တာတပ်ဆင်ခြင်းနယ်ပယ်တွင် အလိုအလျောက်စနစ်နည်းပညာကို မိတ်ဆက်ရန် ပြိုင်ဆိုင်နေကြသည်။
မော်တာ semi-automatic စည်းဝေးပွဲလိုင်းမှ ကိုယ်စားပြုသော အစောပိုင်း မော်တာ တပ်ဆင်မှု အလိုအလျောက်စနစ်စနစ်ကို ပမာဏများစွာနှင့် သတ်မှတ်ချက်အနည်းငယ်ရှိသော မော်တာငယ်များ တပ်ဆင်ခြင်းအတွက် အသုံးပြုခဲ့သည်။
ဤ semi-automatic စည်းဝေးပွဲလိုင်းတွင် ရဟတ်တင်စက်၊ bearing press fitting machine၊ end cap press fitting machine နှင့် screw tightening machine ကဲ့သို့သော အလိုအလျောက် တပ်ဆင်သည့် စက်များ ပါ၀င်သည် loading နှင့်လိပ်ပြာနှင့်လက်သည်းတင်းကျပ်။
ပင်မတပ်ဆင်ခြင်းလုပ်ငန်းစဉ်ကို စက်ယန္တရားများဖြင့်လုပ်ဆောင်ပြီး အရန်လုပ်ငန်းကို လက်ဖြင့်ပြုလုပ်ပါသည်။
ဤ semi-automatic စည်းဝေးပွဲလိုင်း၏ စက်ပစ္စည်းများကို ပြုပြင်ထားပြီး အချို့သော အလုပ်လုပ်သည့် tempo ရှိပြီး၊ 25 မှ 40s/set အထိ လုပ်ဆောင်နိုင်မှု မြင့်မားသည်။
မျိုးစိတ်ပေါင်းများစွာနှင့် သေးငယ်သော ထုတ်ကုန်များ၏ အလိုအလျောက် တပ်ဆင်မှု လိုအပ်ချက်များကို ပြည့်မီစေရန်အတွက် နိုင်ငံခြားတိုင်းပြည်များသည် ကွေးညွှတ်နိုင်သော တပ်ဆင်ဆဲလ်များ (FAC) နှင့် ပြောင်းလွယ်ပြင်လွယ် တပ်ဆင်မှုစနစ်များ (FAS) ကို နှစ်မျိုးလုံးတွင် ကွန်ပျူတာဖြင့် ထိန်းချုပ်သော စက်ရုပ်များကို အဓိက ကိရိယာအဖြစ် အသုံးပြုကြပြီး၊ ထို့ကြောင့် automation ၏မြင့်မားသောအဆင့်ရှိသည်။
လိုက်လျောညီထွေရှိသော တပ်ဆင်သည့်ဆဲလ်တွင် ကိုင်တွယ်စက်ရုပ်နှင့် တပ်ဆင်စက်ရုပ်များစွာ ပါဝင်ပါသည်။
ကိုင်တွယ်စက်ရုပ်သည် အမျိုးမျိုးသော အစိတ်အပိုင်းများကို ကိုင်တွယ်ပြီး တပ်ဆင်ထားသော အစိတ်အပိုင်းများကို တပ်ဆင်စက်ရုပ်၏ အလုပ်ရုံသို့ စနစ်တကျ ပို့ဆောင်ပေးကာ တပ်ဆင်ထားသော အစိတ်အပိုင်းများကို အဝေးသို့ ပို့ဆောင်ရန်အတွက် သယ်ယူပို့ဆောင်ရေး ခါးပတ်သို့ သယ်ဆောင်ရန် တာဝန်ရှိသည်။
အလုပ်ခုံများ နှင့် စာနယ်ဇင်းများ ကဲ့သို့သော စက်ကိရိယာ များကို အစိတ်အပိုင်း အမျိုးမျိုး၏ တပ်ဆင်မှုအတွက် တာဝန်ရှိသော စက်ရုပ်များတွင် တပ်ဆင်ထားပါသည်။
ပြောင်းလွယ်ပြင်လွယ် တပ်ဆင်သည့်ဆဲလ်သည် အစိတ်အပိုင်းအမျိုးမျိုးကို စုစည်းနိုင်ပြီး မော်တာထုတ်ကုန်များကို မတူညီသောသတ်မှတ်ချက်များဖြင့် စုစည်းရန်အတွက် ကွန်ပျူတာပရိုဂရမ်ကိုလည်း ပြောင်းလဲနိုင်သည်။
လိုက်လျောညီထွေရှိသော တပ်ဆင်မှုဆဲလ်ကို အခြေခံ၍ အပြည့်အဝ အလိုအလျောက် လိုက်လျောညီထွေရှိသော တပ်ဆင်မှုစနစ်အား ထပ်မံတီထွင်ခဲ့သည်။
ဤစနစ်တွင် အဓိကအားဖြင့် ပရိုဂရမ်ထုတ်နိုင်သော တပ်ဆင်ယူနစ်၊ စနစ်သိုလှောင်ရုံနှင့် လိုက်လျောညီထွေရှိသော ထောက်ပံ့ပို့ဆောင်ရေးစနစ်၊ အဓိကအားဖြင့် ပရိုဂရမ်ထုတ်နိုင်သော တပ်ဆင်ယူနစ်ကဲ့သို့သော အဓိကအစိတ်အပိုင်းများစွာ ပါဝင်ပါသည်။
ပရိုဂရမ်ထုတ်နိုင်သော တပ်ဆင်မှုယူနစ်သည် ကွန်ပျူတာပရိုဂရမ်ကိုပြောင်းလဲကာ မတူညီသောသတ်မှတ်ချက်များဖြင့် မော်တာအမျိုးမျိုးကို တပ်ဆင်ခြင်းဖြင့် တပ်ဆင်စက်ရုပ်၏ထိန်းချုပ်မှုကို သိရှိနားလည်သည်။
စည်းဝေးပွဲစနစ်သို့ အစိတ်အပိုင်းများ အတားအဆီးမရှိ ထောက်ပံ့မှုနှင့် စနစ်ချို့ယွင်းမှုဖြစ်သည့်အခါ ကြားခံအဖြစ် လုပ်ဆောင်ရန်၊ ပြောင်းလွယ်ပြင်လွယ် တပ်ဆင်မှုစနစ်တွင် သိုလှောင်ရုံတစ်ခု ရှိသည်။
သိုလှောင်ရုံတစ်ခုစီတွင် သိုလှောင်မှုယူနစ်တစ်ခုစီသို့ ကျပန်းဝင်ရောက်ခွင့်ပေးရန် ကွန်ပျူတာအား ပေးစွမ်းနိုင်သော ပရိုဂရမ်လုပ်နိုင်သော စင်ထိန်းချုပ်မှုများ တပ်ဆင်ထားသည်။
လိုက်လျောညီထွေရှိသော ထောက်ပံ့ပို့ဆောင်ရေးစနစ်တွင် ပစ္စည်းများကို ကိုင်တွယ်ခြင်းနှင့် စနစ်အတွင်းနှင့် ပြင်ပလုပ်ငန်းစဉ်များအကြား သယ်ယူပို့ဆောင်ရေးဖလှယ်ခြင်းအတွက် တာဝန်ရှိသည့် conveyor belt သို့မဟုတ် အလိုအလျောက်ပဲ့ထိန်းယာဉ် (AGV) ပါဝင်ပါသည်။
FAS စနစ်များသည် များသောအားဖြင့် စနစ်အတွင်းရှိ အလိုအလျောက် စက်ကိရိယာ အမျိုးမျိုးကို စီမံခန့်ခွဲရန်နှင့် ထိန်းချုပ်ရန် အထက်အောက် ဖြန့်ဝေထားသော ကွန်ပျူတာ ထိန်းချုပ်မှုစနစ်ကို အသုံးပြုသည်။
ကွန်ပျူတာစနစ်တွင် ပင်မကွန်ပျူတာတစ်လုံး၊ FAS စီမံခန့်ခွဲမှုကွန်ပျူတာ၊ ထောက်ပံ့ပို့ဆောင်ရေးကွန်ပြူတာနှင့် FAC ကွန်ပျူတာများစွာ ပါဝင်ပါသည်။

ဤကွန်ပြူတာများမှတဆင့် FAS စနစ်သည် ပရိုဂရမ်ကို အလွယ်တကူ ပြောင်းလဲနိုင်ပြီး အမျိုးအစားပေါင်းများစွာ မော်တာများ၏ အလိုအလျောက် တပ်ဆင်မှုရရှိရန် တပ်ဆင်မှုစနစ်ကို ထိန်းချုပ်နိုင်သည်။
ဥပမာအားဖြင့်၊ နိုင်ငံခြားတွင် တီထွင်ထားသော အလိုအလျောက် တပ်ဆင်သည့်စနစ်သည် သေးငယ်သော မော်တာအမျိုးအစား 450 ကို ကွဲပြားခြားနားသော သတ်မှတ်ချက်များဖြင့် အလိုအလျောက် စုစည်းပေးနိုင်သည်။
FAS လိုက်လျောညီထွေရှိသော တပ်ဆင်မှုစနစ်သည် အလွန်အလိုအလျောက်လုပ်ဆောင်ရုံသာမက အလွန်လိုက်လျောညီထွေဖြစ်စေပြီး ယနေ့ခေတ် အသေးစားမော်တာတပ်ဆင်မှုအတွက် အလိုအလျောက်လုပ်ဆောင်ခြင်း၏ ဦးတည်ချက်ဖြစ်ကြောင်း ယင်းကပြသသည်။
တပ်ဆင်မှုအလိုအလျောက်စနစ်အပြင်၊ အလိုအလျောက်မော်တာစက်ရုံစမ်းသပ်မှုလိုင်းများနှင့် အလိုအလျောက်လျှပ်စစ်စတိတ်ဆေးပန်းချီလိုင်းများလည်းရှိသည်။
အဆိုပါ အလိုအလျောက် လိုင်းများကို အသုံးပြုခြင်းသည် လုပ်သားအခြေအနေများကို များစွာတိုးတက်စေပြီး လုပ်သားများ၏ ကုန်ထုတ်စွမ်းအားကို တိုးမြှင့်ပေးကာ လျှပ်စစ်မော်တာ စက်ရုံများ ၏ meta-personalized ထုတ်လုပ်မှုကို အကောင်အထည်ဖော်နိုင်ရေးအတွက် ကောင်းမွန်သော အခြေအနေများကို ဖန်တီးပေးနိုင်ပါသည်။
လျှပ်စစ်မော်တာများ၏အချက်အလက်များအတွက်မှတ်ချက်များဧရိယာတွင်မက်ဆေ့ခ်ျချန်ထားခဲ့ရန်ကြိုဆိုပါသည်။
လျှပ်စစ်မော်တာနှင့်ပတ်သက်၍ မည်သည့်စုံစမ်းမေးမြန်းမှုမဆို၊ ကျေးဇူးပြု၍ တရုတ်နိုင်ငံရှိ လျှပ်စစ်မော်တာ၏ထိပ်တန်းထုတ်လုပ်သူ-Dongchun မော်တာအား အောက်ပါအတိုင်း ဆက်သွယ်ပါ။

Dongchun မော်တာတွင် သယ်ယူပို့ဆောင်ရေး၊ အခြေခံအဆောက်အအုံနှင့် ဆောက်လုပ်ရေးစသည့် လုပ်ငန်းအမျိုးမျိုးတွင် အသုံးပြုသည့် လျှပ်စစ်မော်တာ အများအပြားရှိသည်။
ချက်ခြင်းပြန်ကြားချက်ကို ရယူပါ။
ဆက်စပ်ပို့စ်များ-






