 コンテンツにスキップ
コンテンツにスキップ 
世界の電力消費量の半分近くは電動機で消費されており、電動機の高効率化は世界のエネルギー問題を解決する最も有効な手段と言われています。
の種類 電気モーター
一般には、磁界中を電流が流れることによって生じる力が回転作用に変換されることを指しますが、広い範囲では直線作用も含みます。
モーターの駆動に使用される電源の種類に応じて、DC モーターと AC電動モーター。
そして、モーターの回転原理により大きく以下に分類されます。 (特殊モーターを除く)
DC電動機/DC(直流)モーター
ブラシ付きモーター
広く使用されているブラシモーターは、一般に DC 電動モーターと呼ばれます。
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
ブラシレスDCモーター
ブラシレス DC モーターは、ブラシや整流子を使用せず、トランジスタなどのスイッチング機能を使用して電流を切り替え、回転動作を行います。
ステッピングモーター。
このモータはパルス電力に同期して動作するため、パルス誘導モータとも呼ばれます。
正確な位置決め運転が容易に実現できるのが特徴です。
ACモーター
非同期モーター
AC 電力はステータ内に回転磁界を生成し、これによりロータ内に誘導電流が生成され、その相互作用により AC 誘導モータの回転が発生します。
同期モーター
交流電力により回転磁界が発生し、磁極を持ったローターが引力により回転します。
-回転速度は幸いなことに電源の周波数と同期しています。
電流、磁場、力について
まず、その後のモーター原理の説明のために、電流、磁界、力に関する基本的な法則を復習しましょう。
懐かしさはありますが、普段磁性部品を使わない方はこの知識を忘れてしまいがちです
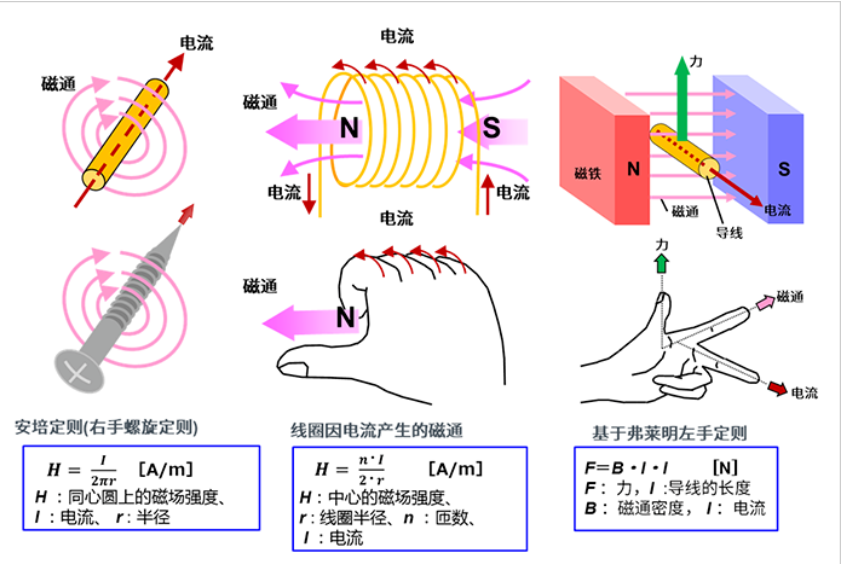
写真と数式を組み合わせて説明します。
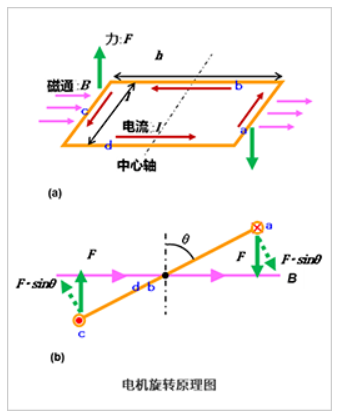
ワイヤフレームが長方形の場合、電流に作用する力が考慮されます。
辺 a と辺 c の部分に働く力 F は次のようになります。
中心軸を中心軸としてトルクが発生する。
例えば、回転角がθだけの状態を考えると、b、dに直角に働く力はsinθなので、a部のトルクTaは次のようになります。
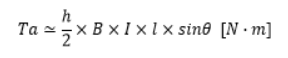
c部分も同様に考えるとトルクは2倍となり、次式で計算されるトルクが発生します。

長方形の面積は S = h・l なので、上式に代入すると次のようになります。

この公式は長方形だけでなく、円などの他の一般的な形状にも適用されます。モーターはこの原理を利用しています。
電気モーターはどのように回転するのでしょうか?
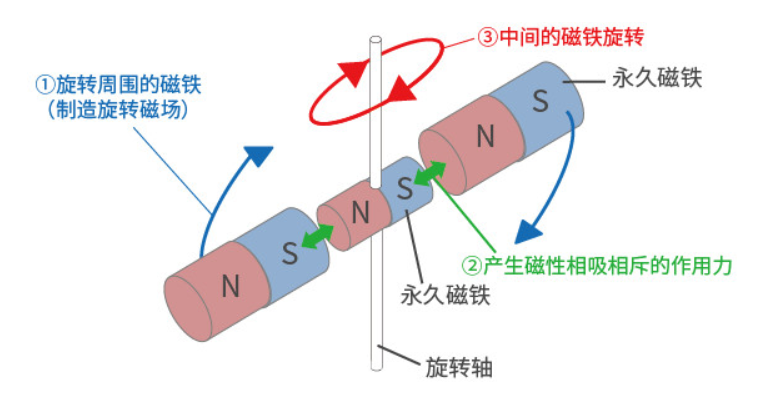
1) 誘導電動機は磁石と磁力によって回転します。
回転軸のある永久磁石の周りに、
①磁石を回転させる(回転磁界を発生させる)、
② 次に、N 極と S 極は異なる極で引き合い、同じレベルで反発し合うという原理に従い、
③回転軸の付いた磁石が回転します。
これがACモーターの回転の基本原理です。
導体に電流が流れると、導体の周囲に回転磁界(磁力)が発生し、磁石が回転しますが、これと実質的に同じ作用状態です。
また、コイル状に巻くと磁力が合成され、大きな磁束(フラックス)が発生し、N極とS極が発生します。
また、コイル状のワイヤーの中に鉄心を入れることで磁力線が通りやすくなり、より強い磁力を発生させることができます。
2) 実際に回転するモーター
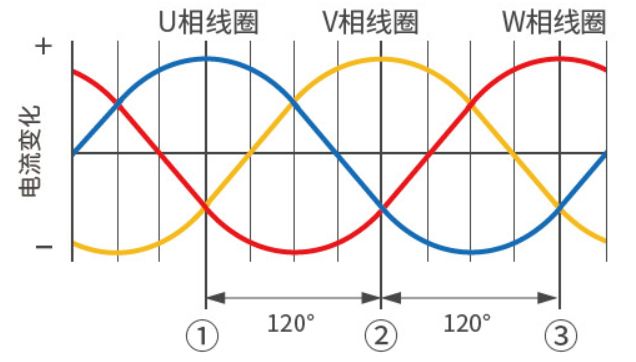
ここでは、モーターを回転させる具体的な方法として、三相交流モーターとコイルを使って回転磁界を作る方法を紹介します。
(三相交流産業用モーターは、位相が 120°離れた交流信号です)
上記①の状態の合成磁場は、下図①に相当します。
上図②の状態の合成磁場は下図②に相当します。
上図③の状態の合成磁場は下図③に相当します。
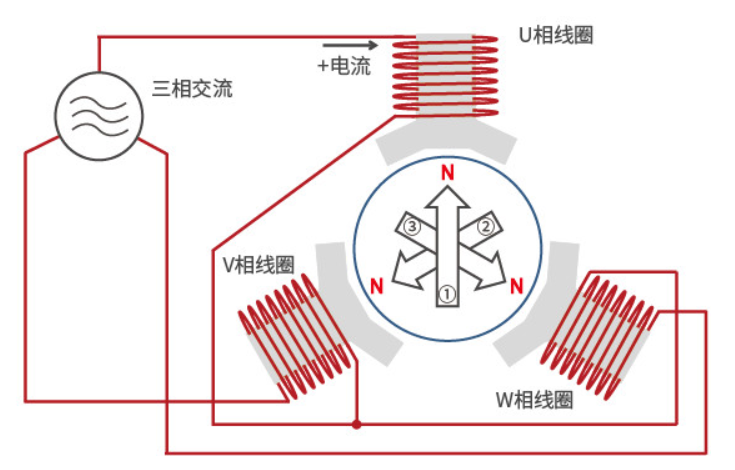
前述したように、巻鉄心のコイルは3相に分かれており、U相コイル、V相コイル、W相コイルが120°間隔で構成されており、高電圧がかかるコイルがN極となり、低電圧でS極を生成するコイル。

各相は正弦波状に変化するため、各コイルが発生する極性(N極、S極)とその磁界(磁力)が変化します。
このとき、N極のみを発生するコイルが、U相コイル→V相コイル→W相コイル→U相コイルと順番に変化し、回転が発生します。

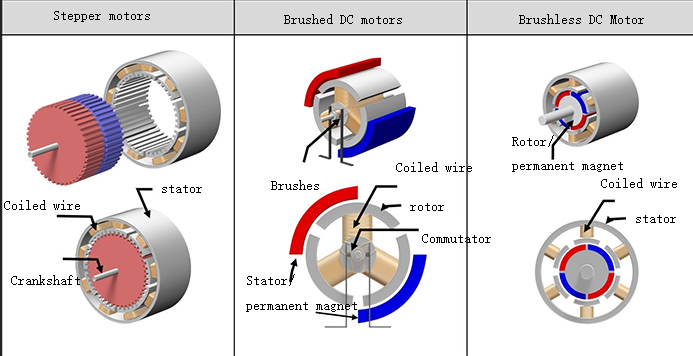
小型モーターの構造
次の図は、ステッピング モーター、ブラシ付き DC (DC) モーター、およびブラシレス DC (DC) モーターの 3 種類の産業用モーターの概略構造と比較を示しています。
これらのモーターの基本構成要素は主にコイル、磁石、ローターであり、種類によってコイル固定型と磁石固定型もあります。
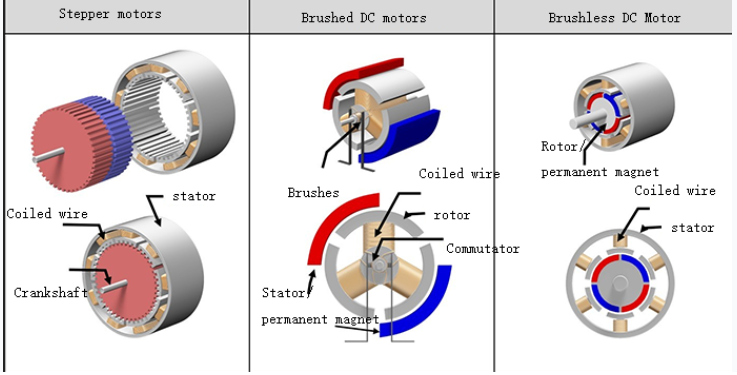
以下は、図例に関連する構造の説明です。もっと細かく分けると他の構造もあるかもしれないので、本稿で紹介する構造は大きな枠の下にあることをご理解ください。
ここでのステッピングモーターのコイルは外側で固定されており、磁石は内側で回転します。
ここでは、ブラシ付き DC モーターの磁石が外側に固定され、コイルが内側で回転します。 T
ブラシと整流子は、コイルに電力を供給し、電流の方向を変える役割を果たします。
ブラシレスモーターの場合、外側にコイルが固定されており、内側で磁石が回転します。
ブラシレスモーターはモーターの種類が異なるため、基本的な部品は同じでも構造が異なります。詳細は各項目で説明します。
ブラシモーター
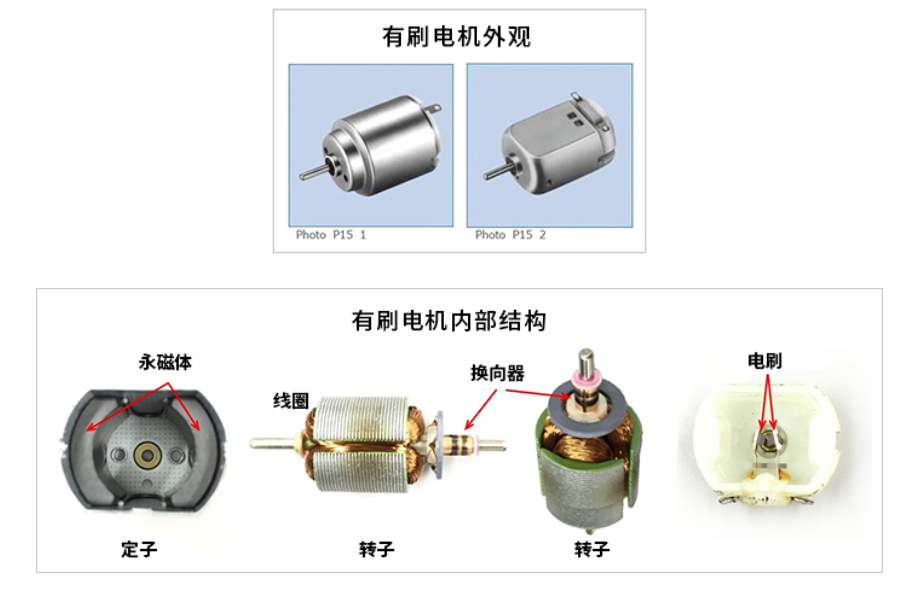
ブラシ付きDCモーターの構造
以下は模型でよく使われるブラシ付きDCモーターの外観と、通常の2極(磁石2個)3スロット(コイル3個)タイプのモーターの内訳模式図です。直流電動機を分解して磁石を取り出した経験のある方も多いのではないでしょうか。
ブラシ付き DC モーターの永久磁石は固定されており、ブラシ付き DC モーターのコイルは内部中心の周りを回転できることがわかります。
The fixed side is called the "stator" and the rotating side is called the "rotor".
以下は構造の概念を表す構造スケッチです。
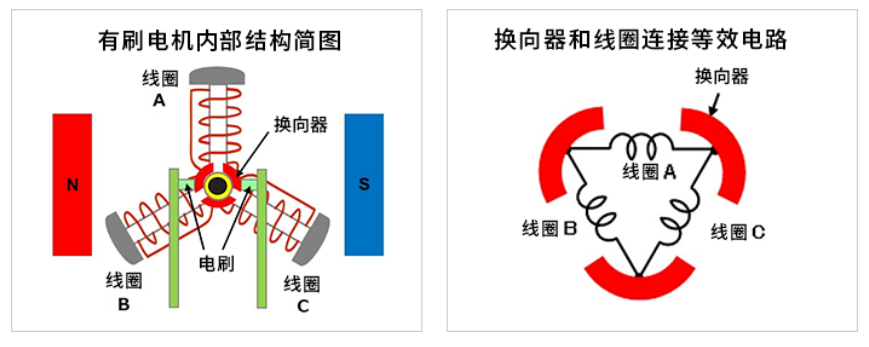
回転中心軸の周囲には整流子(電流を切り替えるための曲げられた金属板)が3つあります。
整流子同士の接触を避けるため、整流子は120°(360°÷3個)離れて配置されています。シャフトの回転に伴って整流子も回転します。
1つの整流子は一方のコイルエンドと他方のコイルエンドに接続されており、3つの整流子と3つのコイルが回路網として全体(リング)を形成している。
2 つのブラシは整流子と接触するように 0° と 180° に固定されています。
ブラシには外部直流電源が接続されており、電流はブラシ→整流子→コイル→ブラシの経路で流れます。
ブラシ付きDCモーターの回転原理
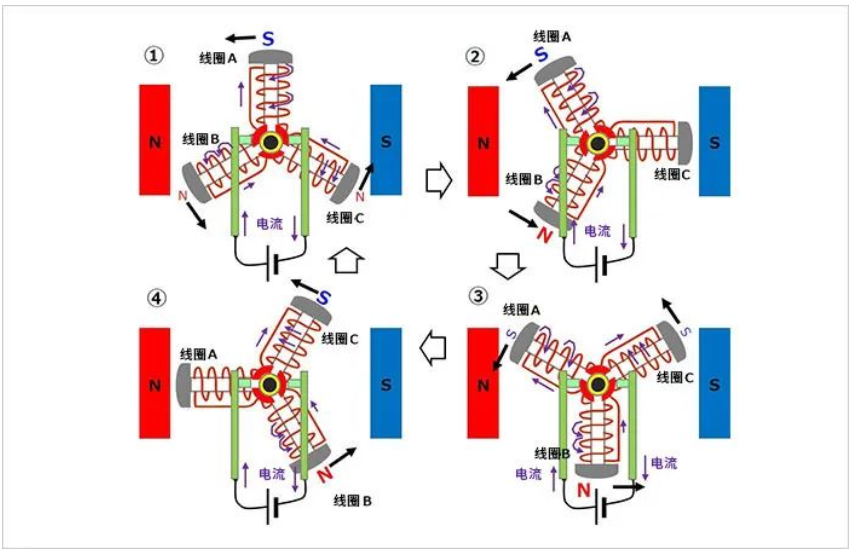
①初期状態から反時計回りに回転させる
コイルAは最上部にあり電動工具の電源とブラシを接続しており、左側を(+)、右側を(-)とします。
左側のブラシから整流子を通ってコイルAに大電流が流れます。
コイルAの上部(外側)がS極になる構造です。
そして、コイルAの電流の1/2が左側のブラシからコイルAと逆方向にコイルB、Cに流れるため、コイルB、Cの外側は弱いN極になります(図中の少し小さい文字で示しています)。形)。
これらのコイル内に発生する磁場と、磁石の反発作用と引力作用により、コイルは反時計回りの回転力を受けます。
②さらに反時計回りに回転
次に、コイルAを反時計回りに30°回転させた状態で、右側のブラシが両方の整流子に接触しているとします。
コイルAの電流は左ブラシから右ブラシへと連続的に流れ、コイルの外側はS極のままです。
コイルBにはコイルAと同じ電流が流れ、コイルBの外側がN極が強くなります。
コイルCの両端はブラシによってショートされているため、電流は流れず、磁界は発生しません。
この場合でも反時計回りに回転する力が働きます。
③から④の上側のコイルは左に移動する力を受け続け、下のコイルは右に移動する力を受け続けて反時計回りに回転し続けます。
③、④とコイルが30°ごとに回転すると、コイルが中心横軸より上にあるときコイルの外側がS極となり、コイルが中心横軸より上にあるときコイルの外側がS極になります。コイルが下にある場合はN極となり、この動作を繰り返します。
つまり、上部コイルには左方向に移動する力が繰り返し、下部コイルには右方向に移動する力が繰り返し加わります(いずれも反時計回り)。これにより、ローターは常に反時計回りに回転します。
反対側の左ブラシ(-)と右ブラシ(+)に電源を接続すると、コイルの固定子巻線に逆方向の磁界が発生し、コイルにかかる力は逆方向に移動し、時計回りの回転となります。 。
さらに、電源が切断されると、ブラシ付きモーターのローターは回転を維持する磁界が奪われるため回転を停止します。
三相全波ブラシレスモーター
三相全波ブラシレスモーターの外観と構造
ブラシレスモーターの外観と構造の一例を次の図に示します。
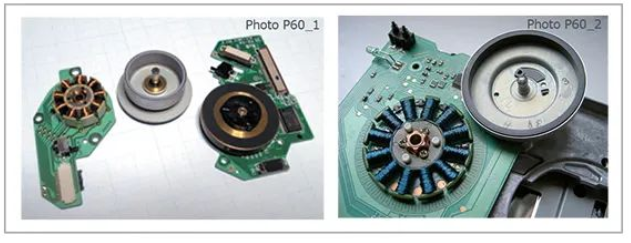
左側は、ディスク再生装置でディスクを回転させるために使用されるスピンドル モーターの例です。コイル数は3相×3の9個です。右はコイル数12個(3相×4)のFDD装置用スピンドルモーターの例です。コイルは基板に固定され、コアに巻かれます。
コイルの右側にある円盤状の部分が永久磁石ローターです。コイルの中心にロータシャフトが挿入されてコイル部分を覆い、コイルの周囲を永久磁石が取り囲んでいます。
三相全波ブラシレスモーターの内部構造とコイル接続の等価回路
次に内部構造とコイル接続部の等価回路のスケッチです。
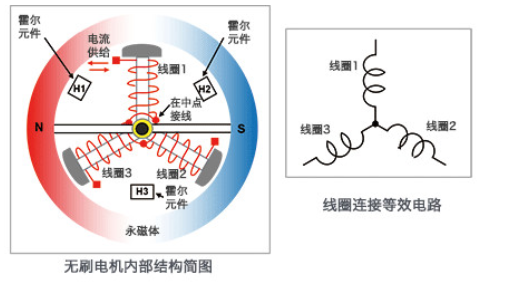
この内部構造スケッチは、非常に単純な構造の2極(磁石2個)3スロット(コイル3個)モータの例です。極数とスロット数が同じブラシ付きモーターの構造に似ていますが、コイル側が固定されており、磁石が回転します。もちろんブラシなどはありません。
この場合、コイルをY字型に接続し、コイルに電流を流すために半導体素子を使い、回転する磁石の位置に応じて電流の流入と流出を制御します。
この例では、ホール素子を使用して磁石の位置を検出します。ホール素子はコイルとコイルの間に配置され、発生する電圧を検出し、磁界の強さに基づく位置情報として利用されます。先ほどのFDDスピンドルモーターの画像では、コイルとコイルの間(コイルの上)に位置を検出するためのホール素子も見えます。
ホール素子は磁気センサーとしてよく知られています。
磁場の大きさを電圧の大きさに変換し、磁場の方向を正または負で示すことができます。
以下はホール効果を示す図です。
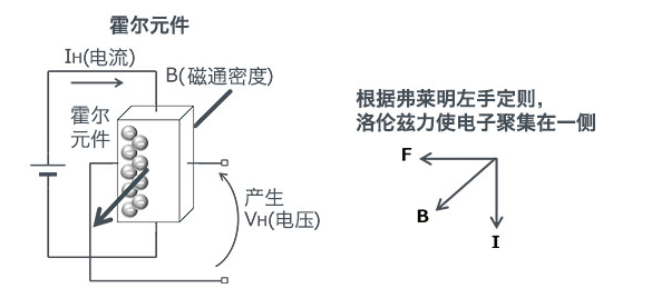
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
このときの電圧 VH は次式で表されます。
VH = (KH / d)・IH・B ※KH:ホール係数、d:フラックス侵入面の厚さ
式が示すように、電流が大きくなるほど、電圧も高くなります。この性質はローター(磁石)の位置検出によく利用されます。
三相全波ブラシレスモーターの回転原理
ブラシレスモーターの回転原理を以下の①~⑥の手順で説明します。ここでは理解を容易にするために、永久磁石を円形から長方形に簡略化して示しています。
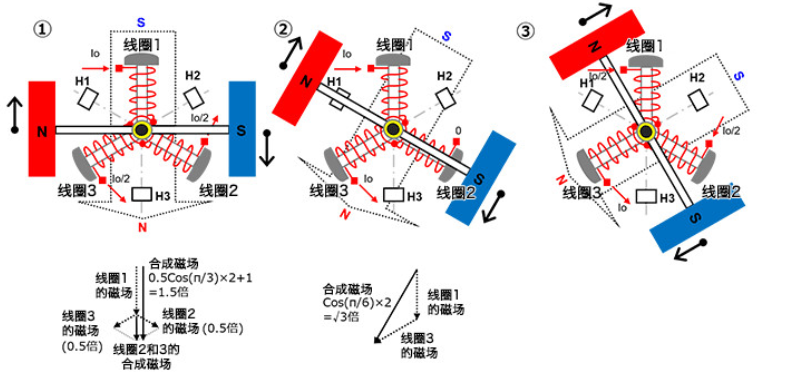
①
3相コイルの場合、コイル1を時計の12時、コイル2を4時、コイル3を8時に固定します。 2極永久磁石のN極を左側、S極を右側にして回転可能とします。
コイル1に電流Ioを流し、コイルの外側にS極磁界を発生させます。コイル2とコイル3から電流Io/2を流し、コイルの外側にN極の磁場を作ります。
コイル2とコイル3の磁界をベクトル合成すると、コイルに電流Ioを流したときに発生する磁界の0.5倍、コイルに電流Ioを流したときに発生する磁界の1.5倍となるN極磁界が下向きに発生します。これにより、永久磁石に対して90°の角度で合成磁場が発生し、最大のトルクが発生し、永久磁石が時計回りに回転します。
回転位置に応じてコイル 2 の電流が減少し、コイル 3 の電流が増加すると、合成磁場も時計回りに回転し、永久磁石は回転し続けます。
②
30°回転した状態では、コイル1に電流Ioが流れ、コイル2の電流がゼロとなり、コイル3から電流Ioが流れ出します。
コイル1の外側がS極、コイル3の外側がN極になります。ベクトルを合成すると、発生する磁界は、電流 Io が 1 つのコイルを通過したときに発生する磁界の √3 (≒ 1.72) 倍になります。これも永久磁石の磁場に対して90度の合成磁場を発生し、時計回りに回転します。
回転位置に応じてコイル1の流入電流Ioが減少し、コイル2の流入電流がゼロから増加し、コイル3の流出電流がIoまで増加すると、合成磁場も時計回りに回転し、永久磁石が回転します。磁石は回転し続けます。
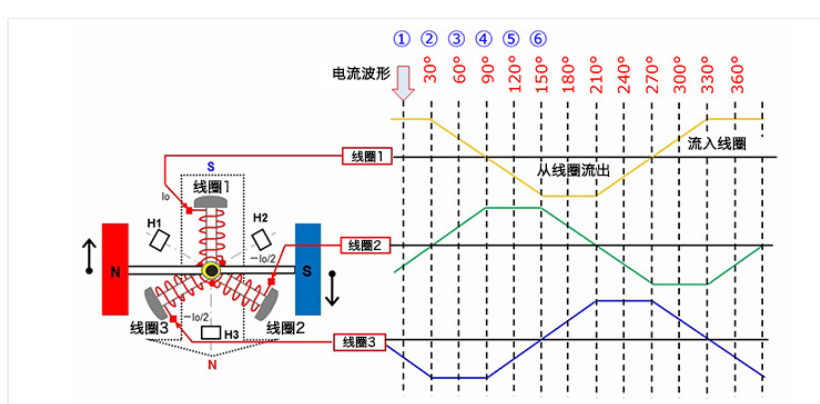
各相の電流が正弦波であると仮定すると、このときの電流値は Io × sin(π⁄3) = Io × √3⁄2 となります。磁場のベクトル合成により、総磁場サイズは、1つのコイルが発生する磁場の(√3⁄2)2×2=1.5倍となります。各相の電流が正弦波の場合、ベクトル合成磁界の大きさは、永久磁石の位置に関係なく、1 つのコイルによって生成される磁界の 1.5 倍となり、磁界の角度は 1 つのコイルに対して 90°になります。永久磁石の磁界。
③
30°回転し続けた状態では、コイル1に電流Io/2が流れ、コイル2に電流Io/2が流れ、コイル3から電流Ioが流れ出します。
コイル1の外側がS極、コイル2の外側もS極、コイル3の外側がN極になります。ベクトルを合成すると、1つのコイルに電流Ioを流したときに発生する磁界の1.5倍の磁界が発生します(同①)。ここでも、永久磁石の磁場に対して90°の角度で合成磁場が発生し、時計回りに回転します。
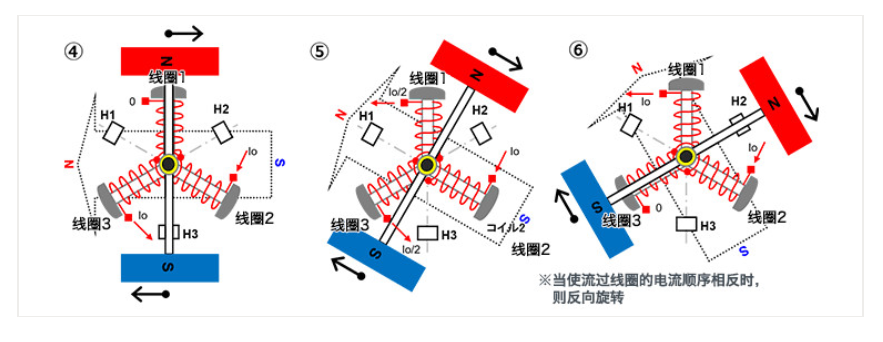
④~⑥
①~③と同様に回転させます。
このように、コイルに流す電流を永久磁石の位置に応じて連続的に切り替えると、永久磁石は一定方向に回転します。同様に、電流が逆になり、合成磁場の方向が逆になると、合成磁場の向きは反時計回りに回転します。
以下の図は、上記の①~⑥の各ステップにおける各コイルに流れる電流を順に示したものです。電流変化と回転の関係は上記の説明から理解できるはずです。
ステッピングモーター
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
ステッピングモーター(二相バイポーラ)の構造
以下の図は左からステッピングモーターの外観例、内部構造のスケッチ、構造概念のスケッチを示しています。
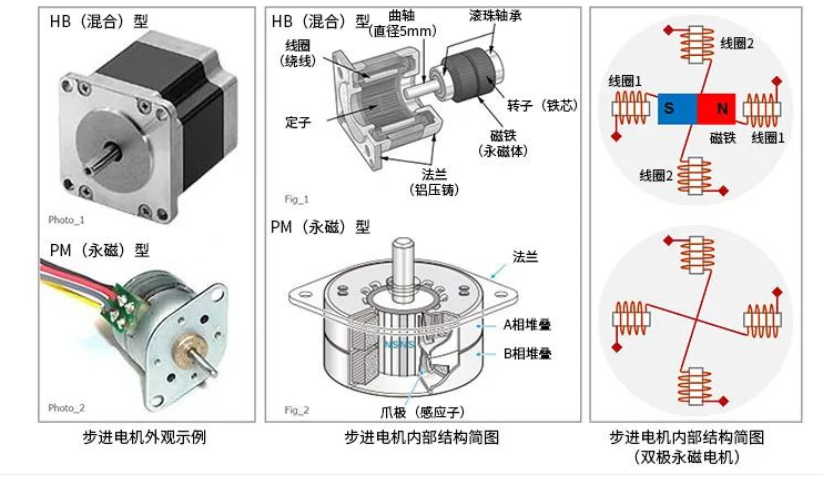
外観例ではHB(ハイブリッド)タイプとPM(永久磁石)タイプのステッピングモータの外観を示します。中段の構造図はHB型、PM型も併記しています。
ステッピングモーターはコイルが固定され、永久磁石が回転する構造です。右のステッピングモーターの内部構造の概念図は、2相(2組)のコイルを使用したPMモーターの例です。ステッピングモーターの基本構造例では、コイルが外側、永久磁石が内側に構成されています。コイルは2相のほか、3相、5相など相数の多いタイプもあります。
ステッピング モーターには他の異なる構造を持つものもありますが、動作原理の説明を容易にするために、本稿ではステッピング モーターの基本構造を示します。この論文を通して、固定コイルと回転永久磁石を備えたステッピング モーターの基本構造を理解したいと考えています。
ステッピングモーターの基本動作原理(単相励磁)
次の図は、ステッピング モーターの基本的な動作原理を紹介するために使用されます。上記二相バイポーラ型コイルの各相(コイル群)の励磁例です。図の前提は、①から④に状態が変化することです。コイルはそれぞれコイル 1 とコイル 2 で構成されます。さらに、電流矢印は電流の流れの方向を示します。
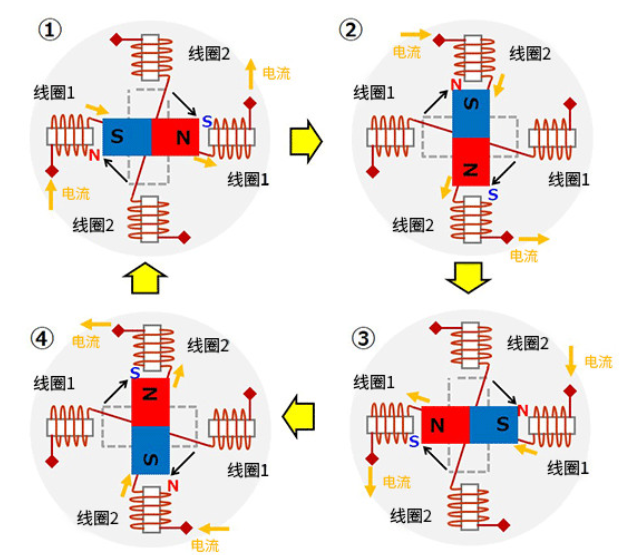
①
・コイル1の左側からコイル1の右側から電流を流します。
・コイル2には電流を流さないでください。
・この時、左コイル1の内側がN、右コイル1の内側がSとなります。
・その結果、真ん中の永久磁石はコイル1の磁界に吸引されて左側S、右側Nに変化して停止します。
②
・コイル1の電流を止め、コイル2の上側から電流が流れ込み、コイル2の下側から電流が流れ出す。
・上コイル2の内側がN、下コイル2の内側がSに変化します。
・永久磁石は磁界に吸引され、時計回りに90°回転して停止します。
③
・コイル2の電流を止めて、コイル1の右側から電流が流れ込み、コイル1の左側から電流が流れるようにします。
・左コイル1の内側がS、右コイル1の内側がNとなります。
・永久磁石は磁界に吸引され、さらに時計回りに90°回転して停止します。
④
・コイル1の電流を止め、コイル2の下側から電流が流れ込み、コイル2の上側から電流が流れるようにします。
・上コイル2の内側がS、下コイル2の内側がNとなります。
・永久磁石は磁界に吸引され、さらに時計回りに90°回転して停止します。
電子回路によりコイルに流れる電流を上記①~④の順に切り替えることでステッピングモーターを回転させることができます。この例では、各スイッチング動作によりステッピング モーターが 90° 回転します。
また、コイルに電流を流し続けると停止状態を維持でき、ステッピングモーターに保持トルクを持たせることができます。なお、コイルに流す電流の順序を逆にすると、ステッピングモータを逆回転させることができる。
産業用モーターの専門メーカーを探す - 東春モーター中国







