 コンテンツにスキップ
コンテンツにスキップ 
周波数変換器は電気工事において習得すべき技術であることは誰もが知っており、周波数変換器を使用してモーターを制御することは電気制御では一般的な方法です。熟練を必要とするものもあります。
今日は私たちの限られた知識で関連する知識をまとめて整理してみます。繰り返しの内容になるかもしれませんが、周波数変換器とモーターの素晴らしい関係を皆様にお伝えすることが目的です。
まず第一に、なぜモーターの制御に周波数変換器を使用するのでしょうか?
まずはこれら 2 つのデバイスについて簡単に理解しましょう。
モーターは電流の変化を妨げる誘導負荷です。起動時には大きな電流変化が生じます。
周波数コンバータは、パワー半導体デバイスのオン/オフ動作を使用して、制御目的で電源周波数を電気エネルギーの別の周波数に変換するデバイスです。主に主回路(整流器モジュール、電解コンデンサ、インバータモジュール)と制御回路(スイッチング電源基板、制御基板)の2つの部分で構成されます。

電気モーターの始動電流を減らすために、特に高出力モーターの場合、出力が増加するにつれて始動電流も増加します。過剰な始動電流は、配電ネットワークに大きな負担をもたらす可能性があります。ただし、周波数コンバータを使用すると、過剰な起動電流を発生させずにスムーズな起動を可能にすることで、この問題を解決できます。
周波数コンバータを使用するもう 1 つの機能は、モーターの速度調整です。多くの場合、より良い生産効率を達成するには、モーター速度の制御が必要です。周波数変換器は、ソース周波数を変更することによって速度を調整する機能で常に知られています。

周波数変換器の制御方式にはどのようなものがありますか?
周波数コンバータを使用してモーターを制御する最も一般的に使用される 5 つの方法は次のとおりです。
低圧汎用周波数変換器の出力電圧は380~650V、出力電力は0.75~400kW、動作周波数は0~400Hz、主回路はAC-DC-AC回路を採用しています。その制御方法は4世代を経ています。
U/f=C による正弦波パルス幅変調 (SPWM) 制御方式
その特徴は、制御回路の構造が簡単で、コストが低く、機械的硬度が高く、一般的なトランスミッションのスムーズな速度調整の要求に応えることができます。さまざまな業界で広く使用されています。
ただし、低周波数では、出力電圧が低くなり、ステータ抵抗の低下に対するトルクの大きな影響により、最大出力トルクが減少します。
また、機械的特性もやはりDCモーターほど硬くありません。
動的トルク能力と静的速度調整性能はまだ満足のいくものではありません。システムのパフォーマンスも高くありません。制御曲線は負荷の変化に応じて変化します。トルク応答が遅い。モーターのトルク利用率は高くありません。低速では固定子の抵抗やインバータの不感帯の影響により性能が低下し、安定性も低下します。そのため、ベクトル制御による可変周波数の速度制御が研究されてきました。

空間ベクトルパルス幅変調(SVPWM)制御方式
これは三相波形の全体的な生成効果に基づいており、モーターのエアギャップの理想的な円形の回転磁界軌道に近似することを目的としています。 3相の変調波形を生成し、内接多角形で円に近似して制御します。
実用化後は、速度制御誤差をなくすために周波数補償を導入するなどの改良が加えられました。フィードバックを通じて磁束振幅を推定し、低速での固定子抵抗の影響を排除します。出力電圧と電流の閉ループにより、動的精度と安定性が向上します。
しかし、制御回路のリンク数が多く、トルク調整機能が導入されていないため、システムの性能が根本的に向上していない。

ベクトル制御(VC)方式
ベクトル制御における可変周波数速度調整の方法は、非同期モータの固定子電流 Ia、Ib、Ic を三相二相変換により静止座標系の二相交流電流 Ia1Ib1 に変換することです。次に、回転子界磁方位回転変換を通じて同期回転座標系の直流電流 Im1 と It1 に変換されます (Im1 は DC モータの励磁電流に対応し、It1 はトルクに比例する電機子電流に対応します)。 DC モーターの制御量は、その制御方法を模倣して得られます。対応する座標逆変換を実行した後、非同期モーター制御を実現できます。

本質的に、AC モーターは DC モーターと同等であり、速度成分と磁界成分に個別に独立した制御が適用されます。まず回転子の磁束を制御し、次に固定子電流をトルクと磁界の成分に分解し、その後座標変換を介して直交制御または分離制御を行います。ベクトル制御法の提案は革新的でしたが、システム特性に大きな影響を与える回転子磁束を正確に観察することが難しいことや、等価な DC モーター制御中に使用される複雑なベクトル回転変換により、実際の結果が理想的な解析結果を達成するのが困難になったため、実際には困難でした。
具体的な方法は次のとおりです。
固定子磁束オブザーバを導入して固定子磁束を制御し、センサレス制御を実現します。
自動識別 (ID) は、モーターの正確な数学モデルに基づいてモーターのパラメーターを自動的に識別します。
固定子インピーダンス、相互インダクタンス、磁気飽和係数、慣性などに対応する実際の値に基づいて、実際のトルク、固定子磁束、回転子速度をリアルタイムで計算します。
磁束とトルクに応じたPWM信号を生成し、インバータのスイッチング状態を制御することでBand-Band制御を実現します。

マトリックス型交流周波数変換器はトルク応答が速い(<2ms)、高速精度(±2%、PGフィードバックなし)、高トルク精度(<+3%);同時に、高い始動トルクと高いトルク精度を備え、特に低速(0 速を含む)では定格トルクの 150% ~ 200% を出力できます。
周波数変換器はどのようにしてモーターを制御するのでしょうか?それらはどのように接続されているのでしょうか?
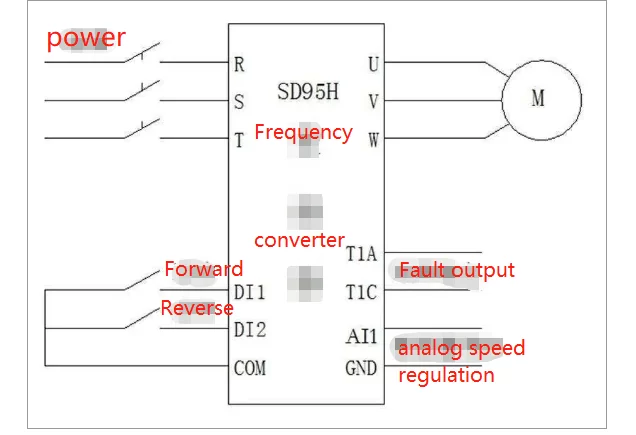
モーターを制御するための周波数コンバーターの配線は、コンタクターの配線と同様、比較的簡単です。主電源線は3本接続されモーターに出力されます。ただし、周波数コンバータを制御するにはさまざまな方法があります。
まず、周波数変換器の端子接続を見てみましょう。周波数変換器には多くのブランドがあり、さまざまな配線方法がありますが、ほとんどの端子接続は同様です。通常、モーターの始動と逆転を制御するために使用される正転と逆転のスイッチ入力が含まれています。フィードバック端子は、動作周波数、速度、障害状態などの動作状態に関するフィードバックを提供するために使用されます。速度設定コントロールは、コンバータの種類に応じてポテンショメータまたはボタンを使用して調整できます。
制御は物理的な配線または通信ネットワークを通じて実現できます。現在、多くの可変周波数ドライブは通信制御をサポートしており、モーターの始動/停止、正転/逆転、速度調整、フィードバック情報を通信回線を通じて送信できます。
モーターの回転数(周波数)が変わると出力トルクはどうなるの?
周波数コンバータで駆動する場合の始動トルクと最大トルクは、主電源で直接駆動する場合よりも小さくする必要があります。
モーターに主電源が供給されている場合、始動時と加速時に大きな衝撃が生じます。ただし、周波数コンバーターによって電力が供給される場合、これらの影響は弱くなります。主電源周波数で直接始動すると、大きな始動電流が発生します。周波数コンバータを使用すると、コンバータの出力電圧と周波数が徐々にモータに加算されるため、起動電流が小さくなり、モータへの影響が小さくなります。

通常、周波数が低下する(速度が低下する)と、モーターが発生するトルクも減少します。この減少の実際のデータは、周波数変換器の一部のマニュアルに記載されています。
磁束制御インバータによるベクトル制御方式を採用することで、モータの低速トルク不足を改善し、低速でも十分なトルクを出力することができます。
可変周波数ドライブ (VFD) を使用して 50Hz を超える周波数に調整すると、モーターの出力トルクが減少します。
従来のモーターは 50Hz の電圧規格に従って設計および製造されています。定格トルクもこの電圧範囲内で与えられます。したがって、定格周波数以下の速度制御は、定トルク速度制御 (T=Te,P) と呼ばれます。<=ペ)。
VFD の出力周波数が 50Hz を超えると、モーターから生成されるトルク間の線形関係は周波数の増加に比例して減少します。
50Hzを超える速度で運転する場合は、電動機の負荷の大きさにより出力トルク不足が発生しないように配慮する必要があります。
たとえば、100 Hz で動作する電気モーターの生成トルクは、50 Hz で動作しているときに生成されるトルクと比較して約半分に減少します。
したがって、定格周波数を超える速度調整は、定電力速度調整(P=Ue*Ie)と呼ばれます。
50Hz以上の周波数変換器の適用
ご存知のとおり、特定のモーターの定格電圧と電流は一定です。
周波数変換器とモーターの両方の定格値が 15kW/380V/30A の場合、モーターは 50Hz を超える周波数で動作できます。
速度が 50Hz の場合、周波数変換器の出力電圧は 380V、電流は 30A です。出力周波数を 60Hz に増加しても、周波数コンバータの最大出力電圧と電流は依然として 380V/30A にすぎません。明らかに、出力電力は変化しないため、これを定電力速度調整と呼びます。

この場合のトルクはどうなるのでしょうか?
P=wT (P: 電力、w: 角速度、T: トルク) であるため、P が一定で w が増加すると、それに応じて T も減少します。
別の観点から見ることもできます。
モーターのステーター電圧 U=E+I*R (I:電流、R:電気抵抗、E:誘導起電力)、
U と I が変化しない場合、E も変化しないことがわかります。
そしてE=kfX (k: 定数、f: 周波数、X: 磁束)。したがって、f が 50 から変化すると -->60Hz,Xもそれに応じて減少します。
モーターの場合、T=K私X(K:定数;I:電流;X:磁束)。したがって、磁束 X が減少すると、それに応じて T も減少します。

At less than or equal to 50 Hz,I*R is small so when U/f=E/f does not change,magnetic flux(X)is constant.Torque(T)and electric current(I)are proportional.This explains why overload(torque)capacity of a variable-frequency drive(VFD)is usually described by its overcurrent capacity,and referred to as "constant-torque"speed regulation(rated current remains unchanged-->最大トルクは変わりません)。
結論: 周波数変換器の出力周波数が50Hz以上から上昇すると、モーターの出力トルクが低下します。
出力トルクに関するその他の要因
加熱および冷却能力はインバータの出力電流能力を決定し、それによってインバータの出力トルク能力に影響を与えます。
キャリア周波数:一般的なインバータが示す定格電流は、最高のキャリア周波数および最高の周囲温度において連続出力できる値を基準としています。キャリア周波数を下げてもモーター電流には影響しません。ただし、コンポーネントの発熱は減少します。
周囲温度:周囲温度の低下を検出した場合にインバータの保護電流値を増やす必要はありません。
高度: 標高が高くなると、放熱性能と断熱性能の両方に影響します。一般に、1000m 未満では無視でき、このレベルを超えると 1000m ごとに 5% の静電容量の減少で十分です。

可変周波数ドライブで制御されるモーターの周波数を調整するにはどうすればよいですか?
上記の概要では、モーターの制御に可変周波数ドライブを使用する必要がある理由と、それがどのように動作するかを学びました。可変周波数ドライブによるモーターの制御は 2 つのポイントに要約できます。1 つは、スムーズな起動と停止を実現するために、可変周波数ドライブでモーターの起動電圧と周波数を制御することです。 2 つ目は、可変周波数ドライブを使用して周波数を変更することでモーターの速度を調整することです。
ネチズンからは実際的な質問がありました。可変周波数ドライブで通常のモーターを制御する場合に調整できる最低周波数はいくらですか?現在は60Hzに調整されており、リーダーからはさらにHz数を上げてほしいとの依頼がありました。 100Hzに調整する予定です。 100Hzに調整した人はいますか? (同様の状況では、どのような要素を考慮する必要がありますか?)

ネチズンの反応を見てみましょう。
ネチズン lpl53: 業務用洗濯機では 200HZ に達しましたが、電流は高くありません。
Netizen26584: 研削盤のモーターは通常 100 ~ 110 の間です…
ネットユーザー 82252031: 十分な電力があり、モーターに過剰な電流が流れていなければ、モーターは動作します。ただし、モータ軸受の温度測定や異音・振動には注意が必要です。 1 つの可変周波数駆動モーターは 70 ~ 80Hz で長時間動作します。 6 極モータは試しやすいですが、2 極モータは注意が必要です。
ネットユーザー fsjnzhouyan: これはモーターに使用されるケイ素鋼板の品質によって決まります。以前の使用例では、通常、85Hz 付近までは問題はありませんでした。ただし、多くのモーターは磁気飽和のため、90Hz 付近まで調整しても定格速度に到達できません。
ネチズンZCMY: モーターベアリングを高速のものに交換するのが最善です。また、振動をテストし、ファンやウォーターポンプなどの負荷に適していることを確認します。
ネチズン mengx9806: 以前、Dongyuan の電気機械シリーズ A1000 可変周波数ドライブを使用して 1210HZ まで調整したことがあります。2 年間連続して問題なく動作し、大きな問題は発生しませんでしたが、何か問題が発生した場合は軽微な問題が発生する可能性があります。
ネチズン68957:180まで調整してみましたが、短時間しか動作しませんでした。
ネチズン 1531214350: 以前洗濯機を修理したことがありますが、モーターは普通のものでした。脱水中は150HZで運転した。
やでや: 普通のモーターの周波数が定格周波数より20%高いと速度差が大きくなりますが、20%高いと速度差が大きくなります。周波数が増加すると、この速度差も増加します。

ネチズン kdrjl: AC 誘導モーターの基本的な構造と使用方法については、まだ理解が不足しているようです。誘導モータを調整するための最高速度制限は、可変周波数ドライブにはありません。一般に、通常の可変周波数ドライブは、V/F モードで 400Hz 以上の周波数で動作します (たとえば、Siemens の可変周波数ドライブは 600Hz で動作します)。ベクトル制御の場合、最大動作周波数の制限は 200 ~ 300Hz ですが、サーボ制御の場合はさらに高い制限があります。したがって、可変周波数ドライブを使用して誘導モーターの速度を最大 100Hz まで調整したい場合、この点に関して技術的な障害や疑問はありません。
誘導電動機のロータの機械的構造 (ケージ構造など) によって、設計の最大回転速度に関連する機械的強度が決まります。回転が速いほど遠心力は大きくなります。したがって、一般に最大回転速度に基づいて設計仕様を満たしており、機械的強度を無限に大きくすることはできません。ローターベアリングにも最大回転限界があるため、これらの値を超えて回転する場合は、これらの限界を理解し、必要に応じて高速ベアリングに交換する必要があります。
最後に、ローターの動的バランスのデバッグと設定は、メーカー指定のパラメーターを超えてはなりません。
要約すると、100 Hz を超える可変周波数駆動アプリケーションを通じて誘導モーターの速度を制御する場合は、高速条件下での信頼性を確保するために、まずメーカーにそれが可能かどうか相談するか、代わりにカスタマイズされたモーターを要求することが重要です。メーカーを経由しない場合は、まずローターの動的バランステストを決定し、次にベアリングの最大回転速度を確認する必要があります。

この値を超える場合は、現場の要件を満たす高速ベアリングに交換する必要があります。放熱の問題も考慮する必要があります。
最後に、経験に基づいて、出力が 100kW 未満の誘導モーターは、100Hz 以内の周波数での動作に比較的適しているはずです。ただし、100kWを超えるものについては、従来の汎用品を選択するよりもカスタマイズが最適です。
ネチズン lvpretend: それは主にモーター自体に依存します。元々高出力の2極モータの場合は注意が必要です。工業用洗濯機は頻繁に過速度で動作する例ですが、その定格速度は一般に低く、ほとんどが 6 極モーターです。私は 4 極モーターが最大 120Hz に達するのを見たことがあります。
詳細については、下記までお問い合わせください。 専門の電気モーターメーカー - 東春モーター中国直接






