 コンテンツにスキップ
コンテンツにスキップ ブラシレスモーターとブラシ付きモーターの違いは何ですか?
同期モーターと非同期モーターの違いは何ですか?
巻線型誘導電動機はどうでしょうか?
サーボモータはすべてACモータですか?
サーボモーターはすべて同期モーターですか?
ステッピングモーターはDCモーターとACモーターのどちらに属しますか?
サーボモーターってサーボモーターですか? ……
賢人たちはかつてこう言いました:もし知識が体系的でないなら、それと段落との違いは何でしょうか?
しかし、あの長々とした文章、空想的な用語、もっともらしい説明についての賢明な本は、まさに雲の中の人々を見つめているのです。
また、インターネットを長い間検索しましたが、電気モーターの構造と分類原理についてのより体系的な説明が見つからなかったため、検索してコピーを整理するのに多大な労力を費やしました。
この記事では体系的な知識を平易な言葉で解説することを心がけ、アニメーションや写真を多用して曖昧な知識を生き生きと表現しています。
私の知識が浅いため、間違いが多くあることは避けられませんが、専門家に訂正していただき、遠慮なくアドバイスをお願いします。
1. 電動機の基本的な種類を説明する図

2. DC電気モーター - ブラシモーター
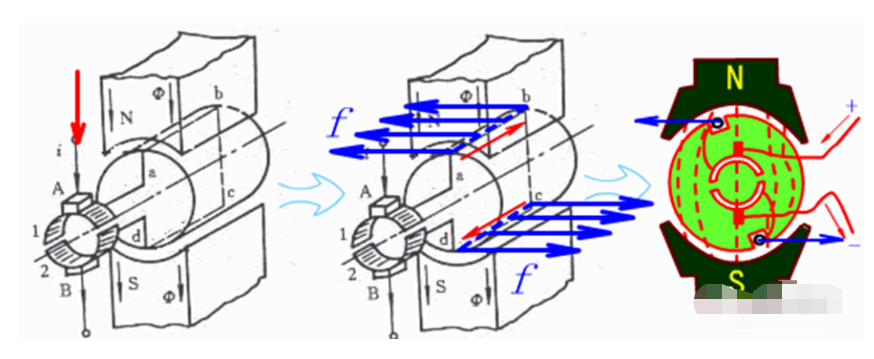
いじめっ子の中学校の物理学を読んでください。磁場の力の中で通電された導体を研究するために、左手を折れた手のひらに訓練しました。これがまさに DC 誘導モーターの原理です。
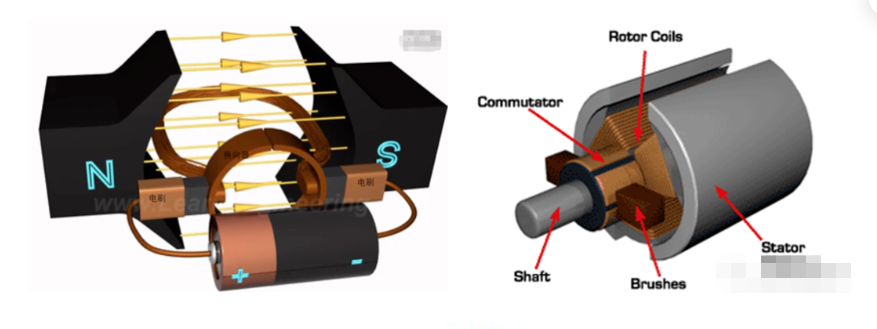
すべての電気モーターはステーターとローターで構成されています。DC 電気モーターではローターを回転させるために、電流の方向を常に変える必要があります。そうしないとローターは半回転しか回転できません。これは自転車のペダルのようなものです。 。
そのため、DC モーターには整流子が必要です。
大まかに言うと、ブラシ付き DC モーターには、ブラシ付きモーターとブラシレス モーターが含まれます。
ブラシ モーターは、DC 誘導モーターまたはカーボン ブラシ モーターとも呼ばれ、しばしばブラシ DC モーターと呼ばれます。
機械的整流を使用しており、外部極は内部コイル(アーマチュア)を動かさず、整流子とローターコイルは一緒に回転し、ブラシと磁石は動かないため、整流子とブラシの摩擦摩擦によって電流方向の切り替えが完了します。
ブラシモーターのデメリット。
1、整流子とブラシの摩擦によって発生する火花の機械的整流、電磁干渉、高騒音、短寿命。
2、信頼性が低く、故障が多く、頻繁なメンテナンスが必要です。
3、整流子の存在により、ローターの慣性が制限され、最大速度が制限され、動的性能に影響を与えます。
欠点が多いにもかかわらず、トルクが高く、構造が簡単で、メンテナンス(カーボンブラシの交換など)が容易で、安価であるため、依然として一般的に使用されています。
2. DCモーター - ブラシレスモーター
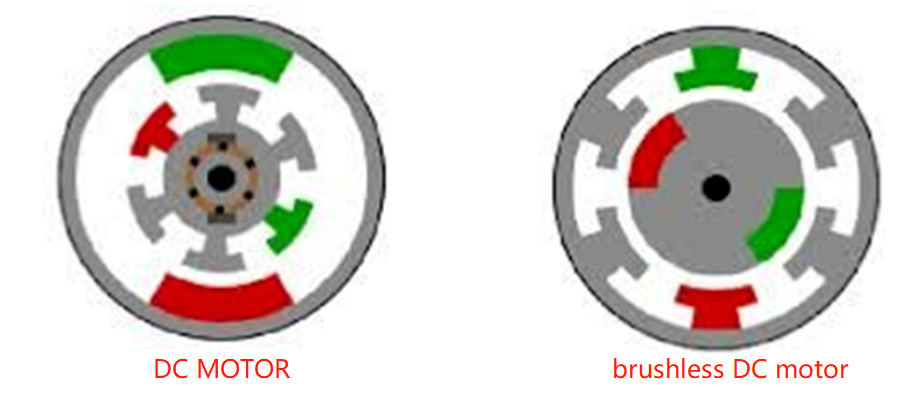
ブラシレス モーターは、一部の分野では DC インバーター モーター (BLDC) とも呼ばれます。電子整流 (ホール センサー) を使用し、コイル (アーマチュア) は磁極を動かさず、永久磁石はコイルの外側またはコイルの内側に配置できます。 、つまり、外部ローター ブラシレス モーターと内部ローター ブラシレス モーターがあります。
ブラシレスモーターは永久磁石同期モーターと同じように構成されています。
ただし、単一のブラシレス モーターは完全な電源システムではありません。ブラシレスは基本的に、連続動作を実現するために、ESC とも呼ばれるブラシレス コントローラーによって制御する必要があります。
その性能を決定づけるのはブラシレス電子ガバナ(ESC)です。
一般に、ブラシレスモーターの駆動電流には方形波と正弦波の2種類があります。
前者をDCブラシレスモーター、後者をACサーボモーターと呼ぶこともありますが、まさにACサーボモーターの一種です。
ブラシレス モーターはさまざまな方法で動作し、インナーローター ブラシレス モーターとアウターローター ブラシレス モーターに分けることができます。
インナーローターは三相なので高価です。
アウターローターは単相で使用されることが多く、価格も手頃で量産もカーボンブラシモーターに近づいたため、近年では広く使用されています。
アウターローター三相の価格はインナーローターの価格に近づきます。
まあ、ご想像のとおり、ブラシモーターの欠点はブラシレスモーターの欠点です。
高効率、低エネルギー消費、低騒音、長寿命、高信頼性、サーボ制御、無段階周波数変換速度(超高速まで)などの利点を備えています。
ブラシ付きDCモーターよりも比較的小型で、非同期ACモーターよりも制御が簡単で、起動トルクが大きい過負荷容量があり、欠点としては……ブラシよりも高価である、メンテナンス性が悪い。
2. DCモーター - 速度制御原理
DC 誘導モーターの速度調整: いわゆる速度調整。つまり、必要なトルクを得るためにモーターの速度を調整することによって行われます。
永久磁石 DC モーターは、電圧、直列抵抗を調整して励磁速度を変更できますが、実際の電圧調整は最も便利で最も一般的に使用され、主に PWM 速度調整が使用されます。
PWMは実際には高速スイッチを介してDC電圧レギュレーション、サイクルを実現し、長時間オープン、平均電圧が高く、長時間オフ、平均電圧が低く、スイッチがオンである限り、調整するのに非常に便利です速度 スイッチング速度が十分に速い限り、グリッドの高調波は少なくなり、電流はより連続的になります。
しかし、ブラシや整流子は長期間にわたって摩耗すると同時に、整流中に大きな電流変化が発生するため、火花が非常に発生しやすくなります。
整流子とブラシは DC 誘導モーターの容量と速度を制限するため、DC 誘導モーターの速度調整がボトルネックになります。
ブラシレス DC 誘導モーターの場合、速度制御は表面上の入力電圧のみを制御します。
しかし、モーターの自己制御周波数制御システム (ブラシレス DC モーター自体にはローター位置検出器とその他のローター位置信号取得装置が付属しており、この装置のローター位置信号を使用して可変電圧周波数制御装置の位相変化瞬間を制御します) は、自動的に制御します。可変電圧に応じた周波数はDC(ブラシ付き)モーターとほぼ同じで、非常に便利です。とても便利です。
ローターに永久磁石を使用しているため、特別な励磁巻線が不要で、同じ容量の場合、モーターはより小さく、より軽く、より効率的で、よりコンパクトで、より信頼性の高い動作、より良い動的性能、電気自動車の駆動などの面で優れています。広く使われてきました。
3. 三相 AC モーター - 非同期モーター
ACモーターは同期モーターと非同期モーターに分けられ、同期モーターは主に発電機に使用され、非同期モーターは主に電気モーターに使用されます。かご形誘導電動機です。
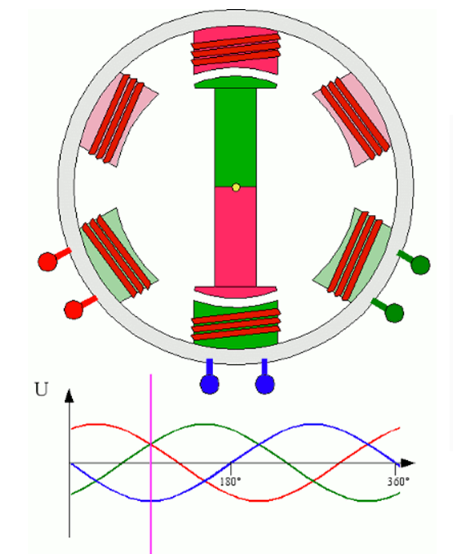
モーターのハウジングはステーターであり、ステーターには 3 つの対称的な AC 巻線があります。
3 つの相の順序が変化すると、回転する合成磁場が形成され、磁場の回転速度が同期速度になります。
同期速度 n=60f/p、f は周波数、p は極対の数です。たとえば、全国送電網 50Hz に接続された 2 極モーターの場合 (つまり、極対の数は 1 対です)、速度 n=60*50/1=3000r/min。
同様に、4 極、6 極、8 極モータの同期速度は 1500、1000、750 です。
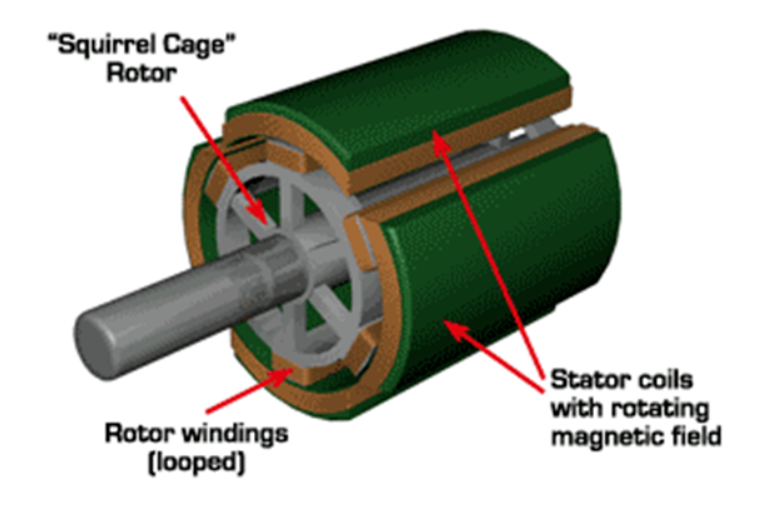
非同期モータは、かご型などの閉コイルロータを備えたシンプルな機構を備えています。
ローターコイルは回転磁界を遮断して誘導電位を発生させ、誘導電位によって誘導電流が発生し、最終的に回転磁界が発生します。
ローターが電磁石となり、ステーターの磁場の回転に追従するようにするには、ローターの速度を次のようにする必要があります。 < ステーターの回転磁界を遮断し、磁気誘導線をカットします。
The public number "Mechanical Engineering Digest", a refueling station for engineers!
つまり、ローターの非同期速度 <同期速度では、ローターとステーターの磁界の間に速度差が生じるため、非同期モーターと呼ばれます。
非同期モーターの定格速度はメーカーによって若干異なり、2 極モーターの場合は約 2800+r/min、4 極、6 極、および 8 極非同期モーターの場合は 1400+、950+、700+ です。
非同期モータの速度は無負荷時には速く、負荷がかかると遅くなります。
非同期モーターは構造が簡単でメンテナンスが容易で動作が安定しており、価格も安いため広く使用されています。
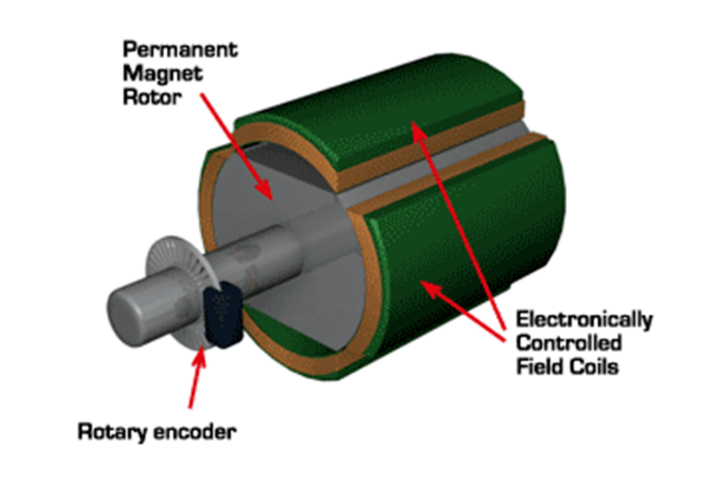
4. 三相交流モーター - 同期モーター
同期モーター。
回転子速度=固定子磁界回転速度とすると同期電動機となり、この時固定子を電磁石や永久磁石にする、つまり固定子に通電する必要はありますが、この時は不要になります。磁気誘導線を切断して回転することができ、回転速度と磁界回転速度は同じ、つまり同期モータの形成です。
同期モーターのローター構造は非同期モーターよりも複雑で、価格が高く、生産期間では非同期モーターほど広く使用されておらず、主に発電機として使用されていますが、現在火力発電所、水力発電所、蒸気タービン、水力タービンは基本的に同期モーターです。
5. 三相 AC モーター - 非同期電気モーターの速度調整
非同期モーターの速度調整: 理論的には、非同期モーターは AC 周波数、電圧、またはローター抵抗を制御し、モーターの極分布によって速度調整を行うことができますが、実際には周波数と電圧を調整する方法で無限の速度調整を実現します。
電圧調整速度範囲が広くないため、一般に速度制御要件が高くない場合にのみ使用でき、用途は広くありません。
可変周波数速度調整:周波数といえば、聞いたことがあるかもしれません。
周波数変換の正式名称は可変電圧可変周波数 (VVVF) です。これは、周波数が変更されると電圧も変更されるため、非同期モーターの速度範囲が十分に大きくなるという意味です。
周波数コンバータは、AC-AC 周波数コンバータと AC-DC 周波数コンバータの 2 つの広いカテゴリに分類できます。
AC-DC インバータ: AC 電力は、パワー エレクトロニクスによって別の周波数の AC 電力に直接変換されます。
最大出力周波数は入力周波数の半分を超えることはできないため、通常は低速、大容量システムでのみ使用され、巨大な減速機の必要性を排除できます。
AC-DC インバーターは、最初に AC 電力を DC に整流し、次にインバーターを通じて制御可能な周波数と電圧を持つ AC に変換します。PWM テクノロジーにより、この種のインバーターは広範囲の可変電圧と周波数を実現できます。
電気自動車の場合、非同期モーターは耐久性があり、過負荷耐性が高く、制御アルゴリズムが非常に成熟しているため、完全に使用できます。
6. 三相交流モーター - 同期モーターの速度調整
同期モーターの速度調整:
同期機にはターンダウン率がなく、構造が決まると制御電圧で速度を変えることができないため、周波数変換器が登場するまでは同期電動機はまったく規制されていませんでした。
周波数コンバータの登場により、AC 同期モータの回転子にも独立した励磁 (永久磁石または電気励磁) があり、非同期モータよりも速度調整範囲が広く、同期モータは非常に大きな速度調整範囲を持つようになりました。新しい命を与えられました。
同期モータ可変電圧可変周波数速度制御システムは、他制御式可変速制御と自己制御式可変速制御に分けられます。
他の制御による可変周波数速度調整の場合、非同期モータの可変周波数調整に似ており、数学的モデルに従ってSVPWMおよびその他の制御方法で制御でき、その性能は通常のAC非同期モータの性能よりも優れています。
自己制御型インバータ同期モータは、開発段階では無整流子モータ、無整流子モータなどさまざまな名前が付けられていました。永久磁石を使用し、三相正弦波を入力する場合、正弦波永久磁石同期モーターと呼ぶことができます。方形波を入力する場合は、台形波永久磁石同期モーターと呼ぶことができます。はい、前述のブラシレス DC マシン (BLDM) に似ています。ラップの大きな輪が曲がったとは感じていません。戻ってください。でも、あなたはDC入力を使用する場合はブラシレスDCモーターの可変速についてより深く理解する必要がありますが、Model3ではDCブラシレスモーターを使用する同期モーターの周波数変換技術(永久磁石同期モーターと同じ構造)を使用しています。 。
7. 単相交流非同期モータ - 単相交流直列励磁モータ(ブラシ)
単相 AC 直列励磁モーターは、一般に直列励磁モーターまたはユニバーサル モーター (UniversalMotor 外国名、AC および DC ユニバーサルに由来する名前) として知られており、電機子巻線と励磁巻線が直列に接続されて連動します。
単相直列励磁モーターは、AC-DC 両用直列励磁モーターとも呼ばれ、AC 電源または DC 電源のどちらでも動作します。
The public number "Mechanical Engineering Literature", the refueling station for engineers!
単相直列励磁モータの利点は、高速、高始動トルク、小型軽量、回転を妨げにくい、適用電圧範囲が広い、電圧調整方式により速度調整が可能であることです。 , これはシンプルで実現しやすいです。
そのため、アングルグラインダーやハンドドリルなどの電動工具に広く使用されています。
単相直列励磁モーターの構造は DC 直列励磁モーターの構造と非常によく似ていますが、主な違いは、単相直列励磁モーターのステーターコアは積層ケイ素鋼で作られている必要があり、磁極はシリコン鋼で作られている必要があることです。 DCの場合は積層構造と一体構造の両方が可能です。
単相直列励磁モーターの速度調整では、電圧を調整する方法の多くは電位を変えることによって行われます。
単相直列励起モーターの電圧調整方法では、制御された移相電圧調整が使用されます。これは、SCR のトリガー電圧を使用して入力電圧よりも遅れ、入力電圧の移相トリガーを実現します。
実装にはハードウェアとソフトウェアの方法があります。
シリコン制御速度制御技術を使用した安定化電圧方式は、シンプルなライン、小型コンポーネントなど、シリコン制御のシンプルかつ効果的な方式の特徴を備えています。
(a) AC 電流変化曲線。
(b) 電流が正の半波の場合のロータの回転方向
(c) 電流がマイナス半波の場合のロータの回転方向

8. 単相交流非同期モータ - 単相交流かご形モータ(ブラシレス)
電機子巻線を流れる単相電流は回転磁界ではなく脈動磁界を生成するため、単相非同期モーターは自己始動できません。
始動の問題を解決するために、単相 AC 電源の非同期モーターは実際には 2 相になることがよくあります。
主巻線には単相電源から直接電力が供給されます。二次巻線は主巻線とは空間的に 90° (電気角、機械角をモーターの極対の数で割ったものに等しい) 異なります。
二次巻線はコンデンサや抵抗を直列接続した後、単相交流電源に接続されており、二次巻線に流れる電流と主巻線の電流は一定の位相差を持っています。
これにより、合成磁場は楕円形の回転場、あるいは円形の回転場にさらに近くなります。
これにより、モータは起動トルクを得る。
抵抗相分離方式のモータは、二次巻線を細く巻くことができるなど安価ですが、相分離効果が低く、抵抗にエネルギーを消費します。
モーターが始動して一定の速度に達すると、通常、二次巻線はモーターシャフトに取り付けられた遠心スイッチによって自動的に取り外され、抵抗損失が低減され、動作効率が向上します。
小型旋盤や小型冷蔵庫など、起動トルクの要求が高くない用途によく使用されますが、速度調整ができないのが欠点です。
より良い動作特性を得るために、モータの特定の動作点でモータの合成磁界を円形の回転磁界に近づけることが可能です。
分相非同期モータの始動性能や動作特性、あるいはその両方を向上させるために必要な静電容量(値)は異なり、大きく3種類に分けられます。
9. ステッピング モーター - オープンループ ステッピング モーター
(開ループ) ステッピング モーターは、電気パルス信号を角度変位に変換する開ループ制御モーターであり、非常に広く使用されています。
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
パルスの数を制御して角変位の量を制御し、正確な位置決めの目的を達成することができます。同時に、パルス周波数を制御してモーターの回転速度と加速度を制御し、速度調整の目的を達成することができます。
ステッピング モーターは誘導モーターの一種で、電子回路、つまりドライバーを使用して DC 電力を時分割電力の多相タイミング制御電流に変換することで動作します。
ステッピング モーターは DC 電流によって電力を供給されますが、ステッピング モーターが電気パルス信号を角変位に変換する開ループ制御モーターであるのに対し、DC 電気エネルギーを機械エネルギーに変換するパワー モーターである DC モーターとして理解することはできません。
10. ステッピングモーターとステッピングサーボの比較
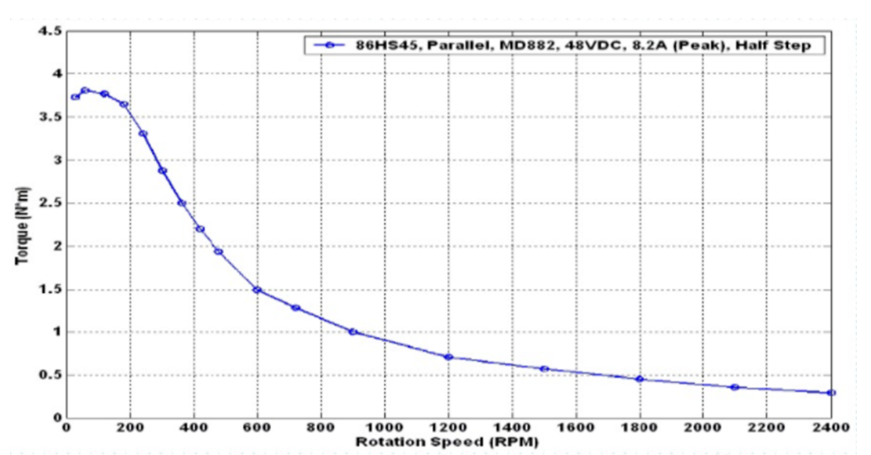
ステッピング モーターは低速アプリケーションで使用されることに注意してください。毎分 1000r/min 以下、最適な動作範囲は 150 ~ 500r/min (閉ループ ステップアップは 1500r) です。
60~70r/minの2相ステッピングモーターは低速共振現象を起こしやすく、振動や騒音が発生するため、減速比の変更、微粉率の増加、磁気ダンパーの追加などで回避する必要があります。
細分割精度の注意事項、細分割レベルが 4 より大きい場合、ステップ角の精度は保証できません。高精度要件があるため、ステッピング モーターの位相を増やす (つまり、ステップ角を小さくする) か、またはクローズド モーターに切り替えることが最善です。ループステッパー、サーボモーター。
(オープンループ) ステッピング モーターとサーボ モーターは 7 異なります。
制御精度 - サーボモータの制御精度をエンコーダに合わせて設定でき、より高精度になります。
B 低周波特性 - ステッピング モーターは低周波で振動しやすくなりますが、サーボ モーターは振動しません。
Cモーメント周波数特性 - ステッピングモーターは速度が上がるとトルクが小さくなるため、一般に最高動作速度は100℃になります。 <1000r/min、サーボモータは定格速度(通常3000r/min)で定格トルクを出力でき、定出力以上の定格速度では最大5000r/minの最高速度を出力できます。
D 過負荷容量 - ステッピング モーターは過負荷できませんが、サーボ モーターの最大トルクは 3 回の過負荷が可能です。
E 動作性能 - 開ループ制御の場合はステッピング モーター、閉ループ制御の場合はサーボ モーター。
F速度応答 - ステッピングモーターの起動時間0.15〜0.5秒、サーボモーター0.05〜0.1、定格3000r / minに達するまでの最速0.01秒。
G効率指標 - ステッピングモーター効率約60%、サーボモーター効率約80%。
実際に使用してみると、サーボモーターは多くのモーターの中でも高価であるため、同期モーターがより広く使用されており、特に位置決め精度の要件がそれほど高くない場合には、同期ベルトドライブ、フラットベルトコンベア、その他の場合にはステッピングモーターがよく使用されます。
11. ステッピング モーター - 閉ループ ステッピング モーター
閉ループ ステッピング モーター: 開ループ ステッピング モーターに加えて、モーターの端にエンコーダーが追加され、閉ループ制御を可能にするステッピング モーターもあります。
ステッピング モーターの閉ループ制御では、位置フィードバックや速度フィードバックを使用して、ローター位置に適切な位相遷移を決定します。これにより、ステッピング モーターの性能が大幅に向上します。
脱調現象のないサーボシステム。
閉ループステッピングモーターの利点。
1. 高速応答。スーツモーターと比較して、閉ループステッパーは位置決めコマンドへの追従性が非常に高いため、位置決め時間が非常に短くなります。頻繁に起動・停止する用途においては、位置決め時間を大幅に短縮できます。
2. 通常のサーボよりも大きなトルクを発生します。通常のステッパーシステムのステップロスと低速振動の不足を補います。
3. 通常のステッピングシステムのようなトルクロスなどを考慮せず、100%負荷でもステップ動作を損なうことなく高トルクを発生できます。
4. クローズドループ駆動を適用することにより、効率は 7.8 倍、出力は 3.3 倍、速度は 3.6 倍に向上します。
オープンループ制御よりも高い走行速度、より安定した滑らかな速度を得ることができます。
5. ステッピングモーターは停止時には完全に静止しており、通常のサーボのような微振動現象はありません。
低コストかつ高精度な位置決めが必要な場合に、汎用サーボシステムのアプリケーションを置き換えることができます。
12. ステッピングモーター - ステッパー閉ループサーボの比較
閉ループステッピングモーターは、負荷の大きさに応じて巻線電流サイズを自動的に調整します。熱と振動は開ループステッピングモーターより少なく、エンコーダーフィードバックがあるため、精度は通常のステッピングモーターより高く、モーター応答は開ループよりも優れています。ステッパーがサーボモーターよりも遅い場合、動作中に位置誤差が発生しますが、コマンドが停止した後、誤差はミリ秒単位で徐々に減少します。
オープンループステッパーよりも高速トルクがあり、0 ~ 1500rpm の一般的な用途に適しています。
要約すると、低コスト、高効率、ジッターなし、微振動停止なし、高剛性、整流なし、高速、高動的応答などを備えた閉ループ ステッピング モーターは、高コストのサーボ システムの代替品です。ローエンドのオープンループステッパーシステムおよびその他のコスト効率の高いソリューション
13. サーボモーター - 一般的なサーボモーター
サーボ モーター (サーボ モーター) は、アクチュエーター モーターとも呼ばれ、制御速度、位置精度を非常に正確にすることができ、電圧信号をトルクと速度に変換して制御対象を駆動することができます。
サーボモータは、ステッピングモータの原理構造とは異なり、制御回路がモータの外部に配置され、モータ部分が内部に配置されるため、標準的なDCモータまたはAC誘導モータとなります。
サーボモーターはパルスに基づいて位置決めを行います。サーボモータは1パルスを受けると1パルスに相当する角度だけ回転します。
モーターが角度回転するたびに、エンコーダーは対応する数のフィードバック パルスを送信します。フィードバック パルスとサーボ ドライバーが受信したパルスは閉ループ制御を形成するため、サーボ ドライバーはモーターの回転を非常に正確に制御して、正確な位置決めを実現できます。
サーボモータ制御:一般に産業用サーボモータは電流ループ、速度ループ、位置ループの3つのループで制御されており、それぞれモータ動作の角加速度、角速度、回転位置をフィードバックすることができます。
このチップは、3 つのフィードバックを通じてモーターの各相の駆動電流を制御し、モーターの速度と位置が計画どおりに正確に動作できるようにします。
ACサーボは、定格速度の下で一定のトルクの特徴を持ち、一般的な200W、400Wの低慣性および中慣性です。ACサーボの定格速度は3000rpm、最高速度は5000rpm、高速です。
トルクは電流に比例するため、ネジの固定や端子の押し込みなど、一定のトルクが必要な場合にトルクモードで動作します。
ACサーボの動作音や振動が非常に小さく、発熱も少ないです。
同じ体積のモーター慣性ローター慣性は小さく、400W サーボ慣性は 57 ベースの 2NM ステッピング モーターのローター慣性と同等です。
サーボには短時間過負荷容量があり、加減速時のモータ過負荷乗数を考慮して選定する必要があります。
サーボは閉ループ制御を使用しており、閉ループ ステッパーと同じ位置追跡誤差があります。
サーボは使用前に試運転が必要です。
ステッピングモーターやサーボモーターの元のトルクでは十分ではなく、減速機を使用する必要がある場合が多いため、減速機セットまたは遊星減速機を使用できます。
6. サーボモーター - サーボ
サーボは DC サーボ モーターの一種で、最初は小型飛行機モデルに使用され、現在は小型ロボットのジョイントに使用されています。
構造分析から、サーボは小型 DC モーター、センサー、制御チップ、減速機セットで構成されており、これらは統合されたハウジングに取り付けられています。
入力信号 (通常は PWM 信号ですが、デジタル信号も使用できます) を通じて回転角度を制御できます。
簡易版ですので、本来のサーボモータの3ループ制御を1ループに簡略化し、位置ループのみを検出します。
安価なソリューションは抵抗によって検出されるポテンショメータですが、高度なソリューションはホール センサーまたはエンコーダを使用します。
一般的なサーボは安価でコンパクトですが、精度が非常に低く、位置安定化能力が低いため、多くのローエンドのニーズに対応できます。
過去 2 年間の民生用小型ロボットのブームにより、小型軽量のサーボが即座に最適な関節コンポーネントになりました。
しかし、ロボットの関節には空中サーボよりもはるかに高い性能が求められ、また市販品としてはDIYプレーヤーよりもはるかに高品質なサーボが求められます。
電気モーターに関する詳しい情報をコメント欄で共有していただければ幸いです。
電動モーターに関するご質問は、電動モーターの専門家にお問い合わせください。 メーカー で 中国 次のように:

東春モーターは、輸送、インフラ、建設などのさまざまな産業で使用される幅広い電動モーターを取り揃えています。
すぐに返信してください。






