Quasi la metà del consumo energetico mondiale è consumata dai motori elettrici, quindi si ritiene che l'elevata efficienza dei motori elettrici sia la misura più efficace per risolvere i problemi energetici mondiali.
In generale si riferisce alla trasformazione della forza generata dal flusso di corrente in un campo magnetico in un'azione rotatoria e, in un ampio ambito, comprende anche un'azione lineare.
A seconda del tipo di alimentazione utilizzata per azionare il motore, esistono motori CC e Motori elettrici CA.
E secondo il principio di rotazione del motore, può essere suddiviso approssimativamente nelle seguenti categorie. (Eccetto motori speciali)
Motore elettrico CC/motori CC (corrente continua).
Motori spazzolati
I motori a spazzole ampiamente utilizzati sono generalmente chiamati motori elettrici DC.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Motore CC senza spazzole
I motori CC senza spazzole non utilizzano spazzole o commutatori, ma utilizzano una funzione di commutazione come un transistor per commutare la corrente ed eseguire un'azione rotatoria.
Motore passo-passo.
Questo motore funziona in modo sincrono con la potenza a impulsi ed è quindi chiamato anche motore a induzione a impulsi.
È caratterizzato dalla capacità di ottenere facilmente operazioni di posizionamento accurate.
Motori CA
Motore asincrono
L'alimentazione CA genera un campo magnetico rotante nello statore, che a sua volta genera una corrente indotta nel rotore, nella cui interazione avviene la rotazione per il motore a induzione CA.
Motore sincrono
L'alimentazione CA crea un campo magnetico rotante e il rotore con poli magnetici ruota a causa dell'attrazione.
-La velocità di rotazione è fortunatamente sincronizzata con la frequenza dell'alimentazione.
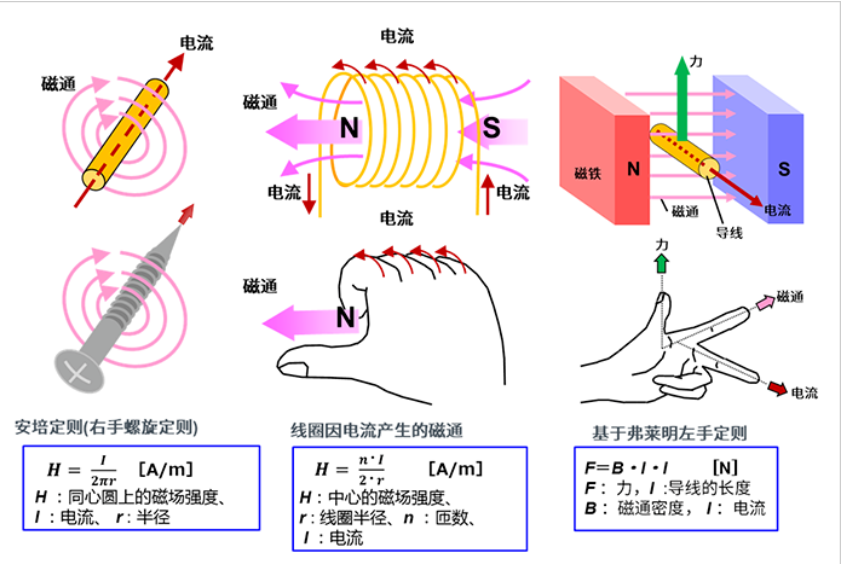
Informazioni su correnti, campi magnetici e forze
Per prima cosa, per il bene delle successive spiegazioni sui principi del motore, rivediamo le leggi/leggi fondamentali riguardanti la corrente, il campo magnetico e la forza.
Anche se c'è un sentimento di nostalgia, è facile dimenticare questa conoscenza se non si utilizzano abitualmente componenti magnetici
Combiniamo immagini e formule per illustrare.
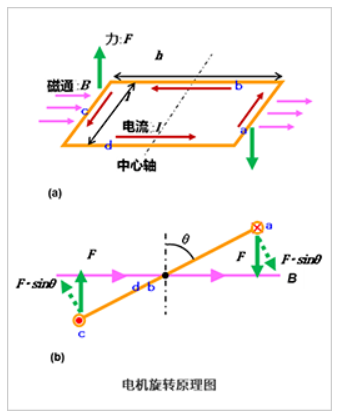
Quando il telaio del filo è rettangolare, viene presa in considerazione la forza che agisce sulla corrente.
La forza F agente sulle parti dei lati a e c è
La coppia viene generata con l'asse centrale come asse centrale.
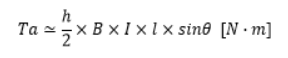
Ad esempio, quando si considera uno stato in cui l'angolo di rotazione è solo θ, la forza che agisce perpendicolarmente a b e d è sinθ, quindi la coppia Ta della parte a è data da:
Considerando allo stesso modo la parte c, la coppia viene raddoppiata e genera la coppia calcolata dalla seguente equazione
Poiché l'area del rettangolo è S = h・l, sostituendola nell'equazione precedente si ottiene il seguente risultato.
La formula si applica non solo ai rettangoli, ma anche ad altre forme comuni come i cerchi. Il motore sfrutta questo principio.
Come ruota un motore elettrico?
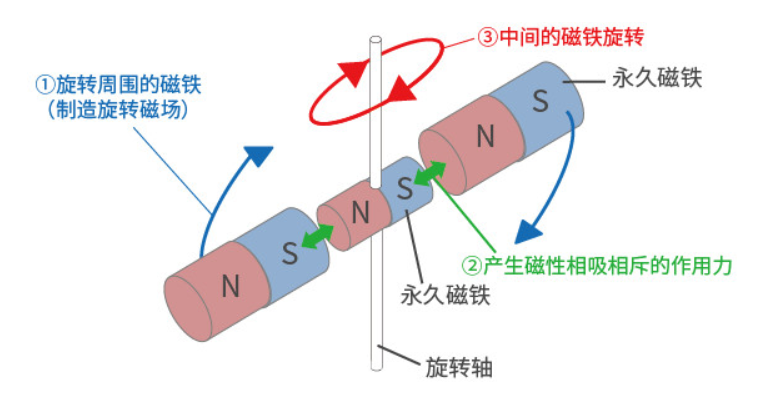
1) I motori a induzione ruotano con l'aiuto di magneti e forza magnetica
Intorno ad un magnete permanente con un albero rotante,
① il magnete viene ruotato (in modo da generare un campo magnetico rotante),
② quindi secondo il principio che i poli N e S si attraggono a poli diversi e si respingono allo stesso livello,
③ il magnete con un albero rotante ruoterà.
Questo è il principio di base della rotazione dei motori CA.
La corrente che scorre nel conduttore provoca un campo magnetico rotante (forza magnetica) attorno ad esso e quindi il magnete ruota, che è praticamente lo stesso stato d'azione di questo.
Inoltre, quando il filo viene avvolto a forma di bobina, la forza magnetica viene sintetizzata, creando un grande flusso di campo magnetico (flusso) che produce i poli N e S.
Inoltre, inserendo un nucleo di ferro nel filo a spirale, le linee di forza magnetiche diventano facili da attraversare e può essere generata una forza magnetica più forte.
2) Motore rotante effettivo
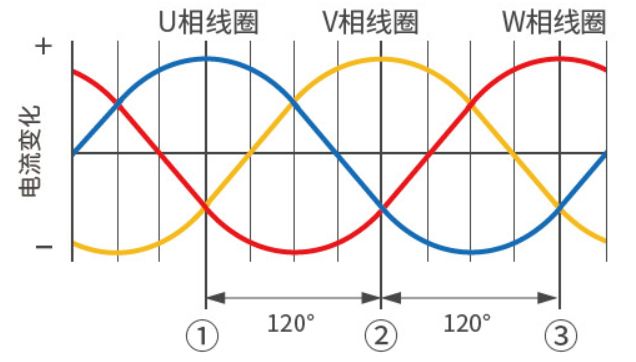
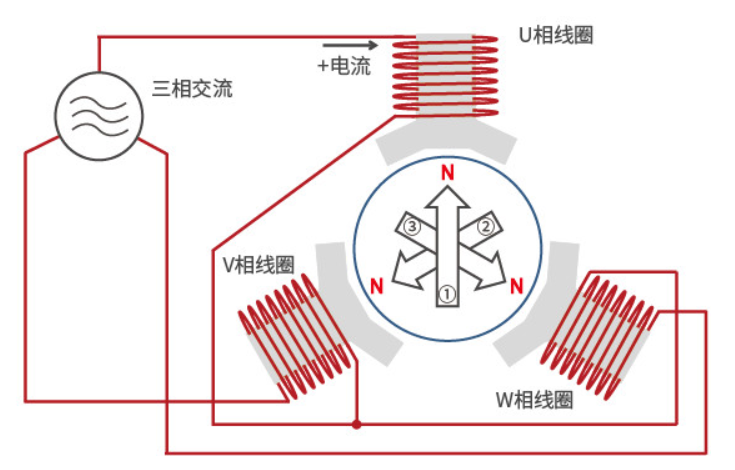
Qui, come metodo pratico per ruotare il motore, introduciamo il metodo per creare un campo magnetico rotante utilizzando motore e bobine CA trifase.
(I motori industriali CA trifase sono segnali CA distanziati di 120° in fase)
Il campo magnetico sintetico nello stato ① sopra corrisponde alla figura ① sotto.
Il campo magnetico sintetico nello stato ② sopra corrisponde alla figura ② sotto.
Il campo magnetico sintetico nello stato ③ sopra corrisponde alla figura ③ sotto.
Come accennato in precedenza, le bobine del nucleo avvolto sono divise in tre fasi, con configurazione a intervallo di 120° di bobine di fase U, bobine di fase V e bobine di fase W, con la bobina con polo N che produce alta tensione e la bobina con bobina con polo S che produce bassa tensione.
Ogni fase cambia secondo un'onda sinusoidale, quindi la polarità (polo N, polo S) e il suo campo magnetico (forza magnetica) generato da ciascuna bobina cambieranno.
In questo momento, la bobina che produce solo il polo N cambia in sequenza in base alla bobina di fase U → bobina di fase V → bobina di fase W → bobina di fase U, e quindi avviene la rotazione.
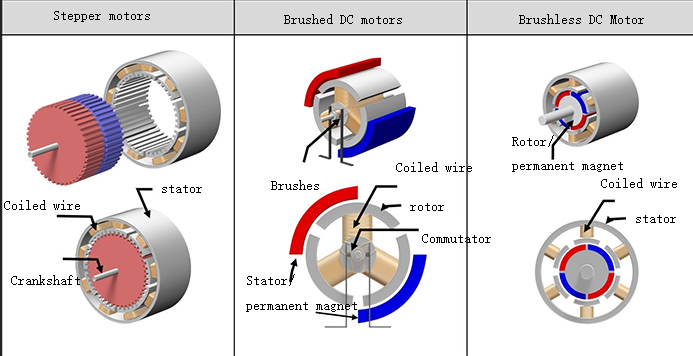
Struttura di un piccolo motore
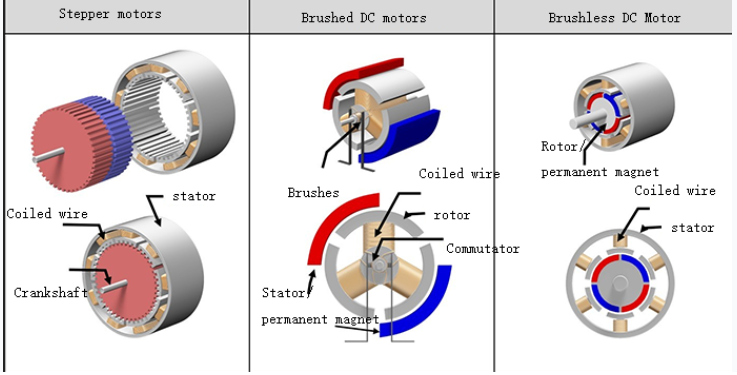
La figura seguente fornisce la struttura approssimativa e il confronto di tre tipi di motori industriali: motori passo-passo, motori CC (CC) con spazzole e motori CC (CC) senza spazzole.
I componenti di base di questi motori sono principalmente bobine, magneti e rotori, ma a seconda del tipo esistono anche tipi con bobina fissa e con magnete fisso.
Di seguito è riportata la descrizione della struttura associata al diagramma di esempio. Poiché potrebbero esserci altre strutture se divise con maggiore attenzione, ti preghiamo di comprendere che la struttura presentata in questo documento si trova sotto una grande cornice.
La bobina del motore passo-passo qui è fissata sul lato esterno e il magnete viene ruotato sul lato interno.
Qui il magnete del motore DC con spazzole è fissato sul lato esterno e la bobina ruota sul lato interno. T
Le spazzole e il commutatore sono responsabili dell'alimentazione della bobina e del cambiamento della direzione della corrente.
Nel caso di un motore brushless la bobina è fissata all'esterno e il magnete ruota all'interno.
La struttura di un motore brushless è diversa anche se i componenti base sono gli stessi a causa delle diverse tipologie di motore. I dettagli verranno spiegati in ogni sezione.
Motore a spazzole
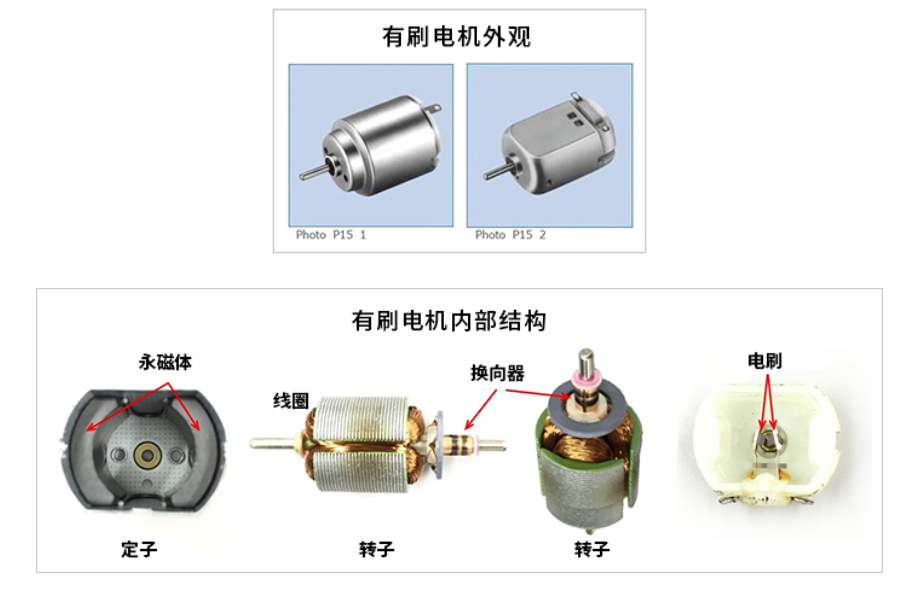
Struttura dei motori DC con spazzole
Di seguito è riportato l'aspetto di un motore CC con spazzole spesso utilizzato nei modelli e un diagramma schematico del guasto di un normale motore di tipo a due poli (2 magneti) a tre slot (3 bobine). Forse molti di voi hanno esperienza nello smontare il motore elettrico CC e nell'estrarre i magneti.
Puoi vedere che i magneti permanenti di un motore DC con spazzole sono fissi e le bobine di un motore DC con spazzole possono ruotare attorno al centro interno.
The fixed side is called the "stator" and the rotating side is called the "rotor".
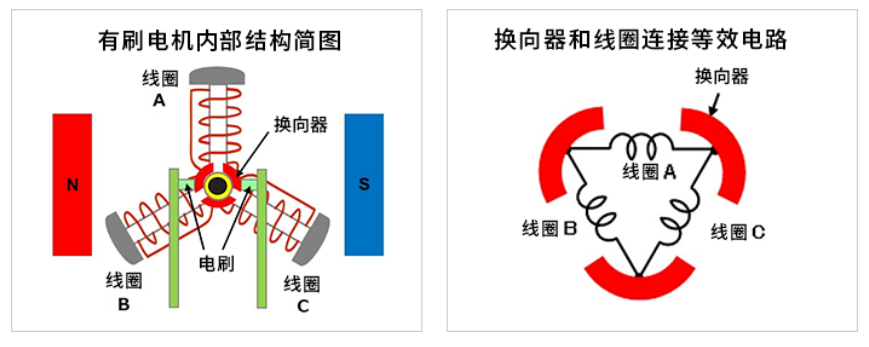
Quello che segue è uno schizzo strutturale che rappresenta il concetto di struttura.
La periferia dell'asse centrale rotante ha tre commutatori (lamiere piegate per la commutazione della corrente).
Per evitare contatti tra loro, i commutatori sono configurati a 120° l'uno dall'altro (360° ÷ 3 pezzi). I commutatori ruotano con la rotazione dell'albero.
Un commutatore è collegato a un'estremità della bobina e all'altra estremità della bobina, e i tre commutatori e le tre bobine formano un insieme (anello) come una rete circuitale.
Due spazzole sono fissate a 0° e 180° per entrare in contatto con il commutatore.
Un alimentatore CC esterno è collegato alle spazzole e la corrente scorre nel percorso spazzola → commutatore → bobina → spazzola.
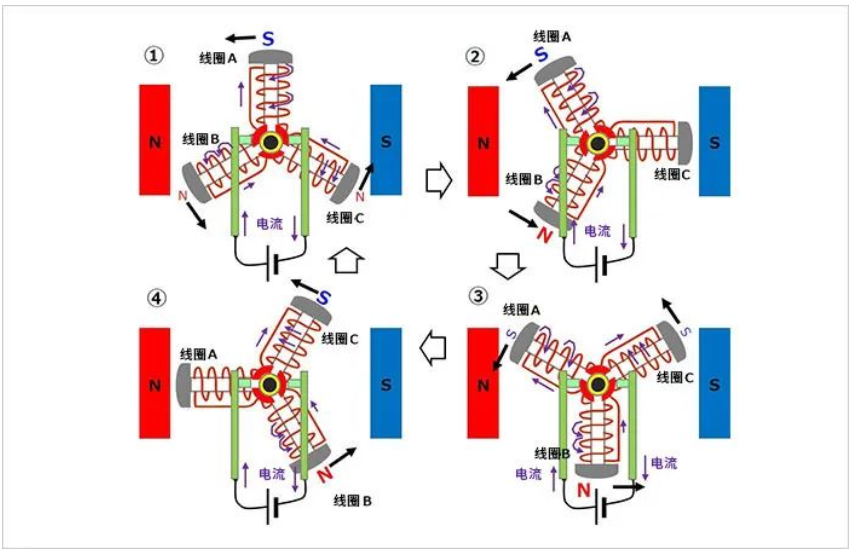
Principio di rotazione del motore DC a spazzole
① Ruotare in senso antiorario dallo stato iniziale
La bobina A è nella parte più alta e collega l'alimentazione degli elettroutensili alle spazzole, impostare il lato sinistro come (+) e il lato destro come (-).
Una grande corrente scorre dalla spazzola sinistra attraverso il commutatore alla bobina A.
Questa è la struttura in cui la parte superiore (esterna) della bobina A diventa il polo S.
E poiché metà della corrente proveniente dalla bobina A scorre dalla spazzola sinistra alle bobine B e C nella direzione opposta alla bobina A, i lati esterni delle bobine B e C diventano deboli poli N (indicati da lettere leggermente più piccole nell'immagine). figura).
I campi magnetici generati in queste bobine e gli effetti repulsivi e attrattivi dei magneti fanno sì che le bobine siano soggette a una forza di rotazione in senso antiorario.
② Ulteriore rotazione in senso antiorario
Successivamente, supponiamo che la spazzola destra sia in contatto con entrambi i commutatori in uno stato in cui la bobina A viene ruotata di 30° in senso antiorario.
La corrente della bobina A scorre continuamente dalla spazzola sinistra attraverso la spazzola destra e il lato esterno della bobina rimane polo S.
La stessa corrente della bobina A scorre attraverso la bobina B e il lato esterno della bobina B diventa più forte con polo N.
Poiché le estremità della bobina C sono cortocircuitate dalle spazzole, non scorre corrente e non viene generato alcun campo magnetico.
Anche in questo caso è presente una forza di rotazione antioraria.
La bobina sul lato superiore da ③ a ④ è continuamente soggetta a una forza che si muove verso sinistra, mentre la bobina inferiore è continuamente soggetta a una forza che si muove verso destra e continua a ruotare in senso antiorario
Quando la bobina ruota ogni 30° verso ③ e ④, il lato esterno della bobina diventa il polo S quando la bobina si trova sopra l'asse orizzontale centrale; quando la bobina è in basso diventa il polo N e il movimento si ripete.
In altre parole, la bobina superiore è ripetutamente soggetta ad una forza che si sposta verso sinistra e la bobina inferiore è ripetutamente soggetta a una forza che si sposta verso destra (entrambe in senso antiorario). Ciò fa sì che il rotore ruoti sempre in senso antiorario.
Se l'alimentazione è collegata alla spazzola sinistra opposta (-) e alla spazzola destra (+), viene generato un campo magnetico negli avvolgimenti dello statore delle bobine nella direzione opposta, quindi la forza applicata alle bobine si muove nella direzione opposta e diventa rotazione in senso orario .
Inoltre, quando viene interrotta l'alimentazione, il rotore del motore a spazzole smette di girare perché è privato del campo magnetico che lo fa girare.
Motore brushless trifase a onda intera
Aspetto e struttura di un motore brushless trifase a onda intera
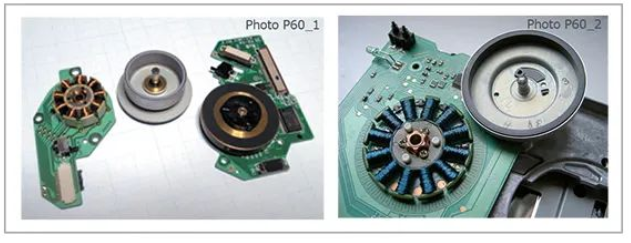
La figura seguente mostra un esempio dell'aspetto e della struttura di un motore brushless.
A sinistra c'è un esempio di un motore a mandrino utilizzato per ruotare un disco in un dispositivo di riproduzione del disco. Ci sono 9 bobine di tre fasi x 3. A destra c'è un esempio di motore mandrino per un dispositivo FDD con 12 bobine (trifase x 4). Le bobine sono fissate sulla scheda e avvolte sul nucleo.
La parte a forma di disco sul lato destro delle bobine è il rotore a magnete permanente. L'albero del rotore è inserito al centro della bobina e copre la parte della bobina, mentre i magneti permanenti circondano la periferia della bobina.
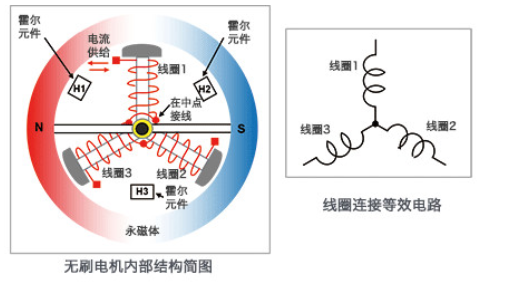
La struttura interna del motore brushless trifase a onda intera e il circuito equivalente del collegamento della bobina
Poi c'è uno schizzo della struttura interna e del circuito equivalente della connessione della bobina.
Questo schizzo della struttura interna è un esempio di un motore a 2 poli (2 magneti) e 3 slot (3 bobine) con una struttura molto semplice. È simile alla struttura di un motore a spazzole con lo stesso numero di poli e scanalature, ma il lato della bobina è fisso e i magneti possono essere ruotati. Naturalmente non ci sono spazzole.
In questo caso, le bobine sono collegate a forma di Y e un elemento semiconduttore viene utilizzato per fornire corrente alle bobine, controllando l'afflusso e il deflusso di corrente in base alla posizione dei magneti rotanti.
In questo esempio viene utilizzato un elemento Hall per rilevare la posizione del magnete. L'elemento Hall è configurato tra la bobina e la bobina per rilevare la tensione generata e utilizzata come informazione di posizione in base all'intensità del campo magnetico. Nell'immagine del motore mandrino FDD fornita in precedenza, puoi anche vedere l'elemento Hall utilizzato per rilevare la posizione tra la bobina e la bobina (sopra la bobina).
Gli elementi Hall sono noti come sensori magnetici.
Può convertire l'entità del campo magnetico nell'entità della tensione e indicare la direzione del campo magnetico in termini positivi o negativi.
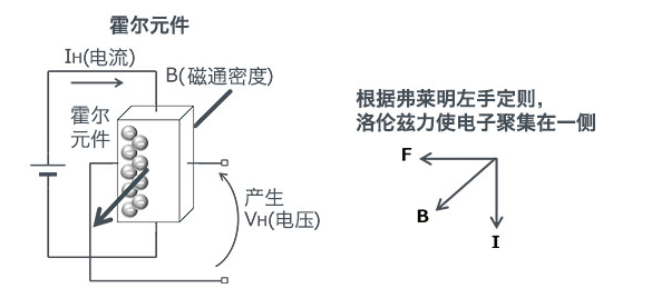
Di seguito è riportato un diagramma che mostra l'effetto Hall.
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
La tensione risultante VH è espressa dalla seguente equazione.
VH = (KH / d)・IH・B ※KH: coefficiente Hall, d: spessore della superficie di penetrazione del flusso
Come mostra la formula, maggiore è la corrente, maggiore è la tensione. Questa proprietà viene spesso utilizzata per rilevare la posizione del rotore (magnete).
Principio di rotazione del motore brushless trifase a onda intera
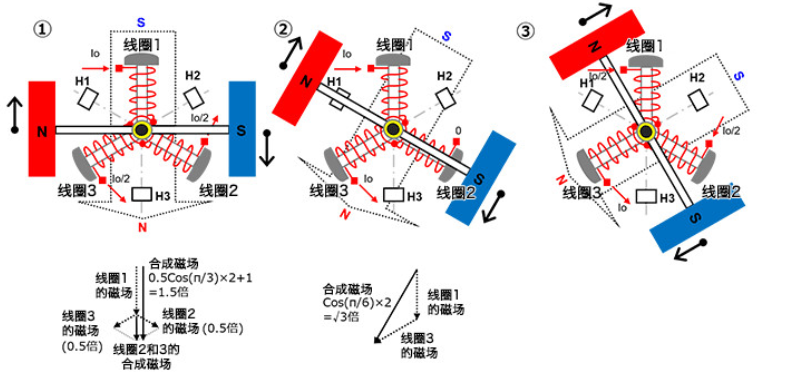
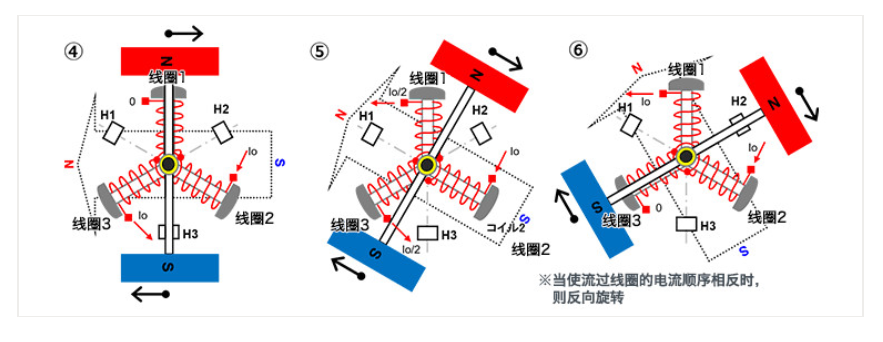
Il principio di rotazione del motore brushless verrà spiegato nei passaggi successivi da ① a ⑥. Per una facile comprensione, qui il magnete permanente è semplificato da un cerchio a un rettangolo.
①
In una bobina trifase, lascia che la bobina 1 sia fissata alle 12, la bobina 2 sia fissata alle 4 e la bobina 3 sia fissata alle 8 dell'orologio. Lascia che il polo N del magnete permanente a 2 poli sia sul lato sinistro e il polo S sul lato destro e ruotabile.
Fai fluire la corrente Io nella bobina 1 per produrre il campo magnetico del polo S all'esterno della bobina. Lascia che la corrente Io/2 fuoriesca dalla bobina 2 e dalla bobina 3 per produrre un campo magnetico a polo N all'esterno della bobina.
Quando i campi magnetici delle bobine 2 e 3 sono sintetizzati vettoriale, il campo magnetico di polo N viene generato verso il basso, che è 0,5 volte la dimensione del campo magnetico generato quando la corrente Io passa attraverso una bobina, e diventa 1,5 volte la dimensione quando sommato al campo magnetico della bobina 1. Questo produce un campo magnetico sintetico con un angolo di 90° rispetto al magnete permanente, in modo che possa essere generata la coppia massima e il magnete permanente ruoti in senso orario.
Quando la corrente nella bobina 2 viene ridotta e la corrente nella bobina 3 viene aumentata in base alla posizione di rotazione, anche il campo magnetico sintetico ruota in senso orario e il magnete permanente continua a ruotare.
②
Nello stato ruotato di 30°, la corrente Io fluisce nella bobina 1 in modo che la corrente nella bobina 2 sia zero, facendo sì che la corrente Io fuoriesca dalla bobina 3.
Il lato esterno della bobina 1 diventa il polo S e il lato esterno della bobina 3 diventa il polo N. Quando il vettore viene sintetizzato, il campo magnetico prodotto è √3 (≈1,72) volte il campo magnetico prodotto quando la corrente Io passa attraverso una bobina. Anche questo produce un campo magnetico sintetizzato con un angolo di 90° rispetto al campo magnetico del magnete permanente e ruota in senso orario.
Quando la corrente di afflusso Io della bobina 1 viene ridotta in base alla posizione di rotazione, la corrente di afflusso della bobina 2 viene aumentata da zero e la corrente di deflusso della bobina 3 viene aumentata a Io, anche il campo magnetico sintetico ruota in senso orario e il permanente il magnete continua a ruotare.
Supponendo che la corrente in ciascuna fase sia sinusoidale, il valore della corrente qui è Io × sin(π⁄3) = Io × √3⁄2. Mediante la sintesi vettoriale del campo magnetico, la dimensione totale del campo magnetico è (√3⁄2)2 × 2 = 1,5 volte il campo magnetico generato da una bobina. Quando le correnti in ciascuna fase sono sinusoidali, l'intensità del campo magnetico di sintesi vettoriale è 1,5 volte il campo magnetico prodotto da una bobina indipendentemente dalla posizione del magnete permanente, e il campo magnetico forma un angolo di 90° rispetto a il campo magnetico del magnete permanente.
③
Nello stato in cui la rotazione continua per 30°, la corrente Io/2 fluisce nella bobina 1, la corrente Io/2 fluisce nella bobina 2 e la corrente Io esce dalla bobina 3.
Il lato esterno della bobina 1 diventa il polo S, anche il lato esterno della bobina 2 diventa il polo S e il lato esterno della bobina 3 diventa il polo N. Quando il vettore viene sintetizzato, il campo magnetico prodotto è 1,5 volte il campo magnetico prodotto quando la corrente Io scorre attraverso una bobina (come ①). Anche in questo caso viene generato un campo magnetico sintetico con un angolo di 90° rispetto al campo magnetico del magnete permanente e ruota in senso orario.
④~⑥
Ruotare allo stesso modo da ① a ③.
In questo modo, se la corrente che scorre nella bobina viene commutata continuamente in sequenza in base alla posizione del magnete permanente, il magnete permanente ruoterà in una direzione fissa. Allo stesso modo, se la corrente viene invertita e la direzione del campo magnetico sintetico viene invertita, ruoterà in senso antiorario.
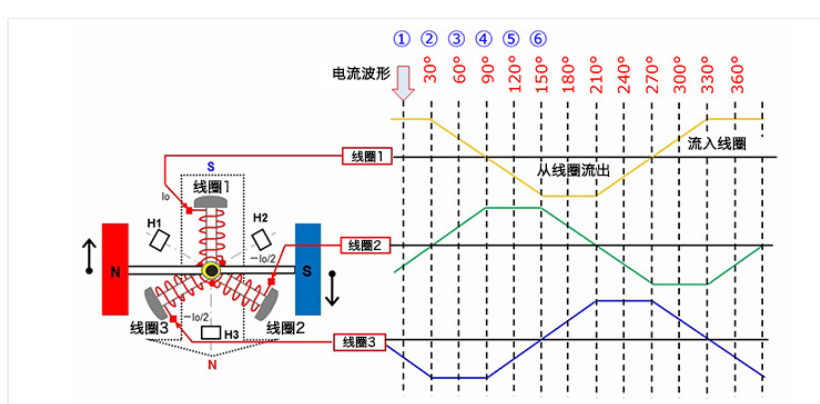
Il diagramma seguente mostra le correnti in ciascuna bobina per ciascuno dei passaggi da ① a ⑥ sopra in successione. La relazione tra variazione di corrente e rotazione dovrebbe essere compresa dalla descrizione di cui sopra.
Motori passo-passo
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
Struttura del motore passo-passo (bipolare bifase)
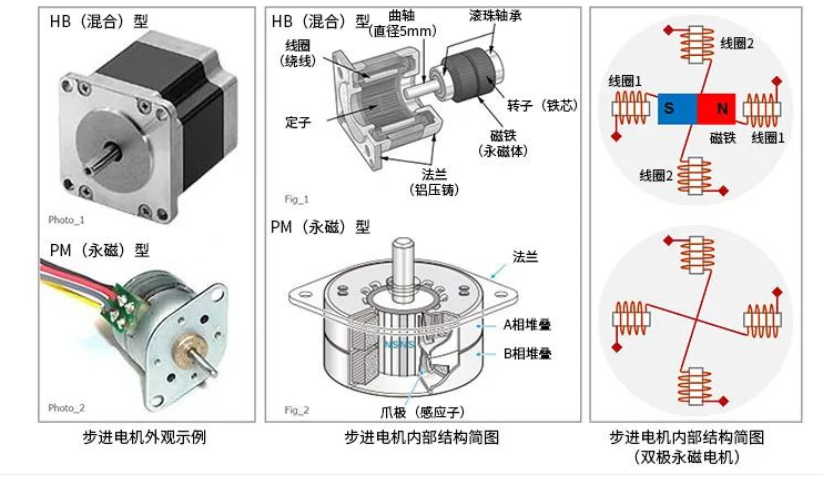
I seguenti diagrammi, da sinistra a destra, mostrano un esempio dell'aspetto di un motore passo-passo, uno schizzo della struttura interna e uno schizzo del concetto di struttura.
Nell'esempio dell'aspetto, viene fornito l'aspetto dei motori passo-passo di tipo HB (ibrido) e PM (a magnete permanente). Il diagramma della struttura al centro è riportato anche per il tipo HB e il tipo PM.
Il motore passo-passo è una struttura in cui la bobina è fissa e il magnete permanente ruota. Il diagramma concettuale della struttura interna di un motore passo-passo sulla destra è un esempio di un motore PM che utilizza due fasi (due set) di bobine. Nell'esempio della struttura base del motore passo-passo, le bobine sono configurate all'esterno e i magneti permanenti sono configurati all'interno. Oltre alle bobine bifase, esistono anche tipi con un numero maggiore di fasi come trifase e cinquefase.
Alcuni motori passo-passo hanno altre strutture diverse, ma la struttura di base del motore passo-passo viene fornita in questo documento per facilitare l'introduzione del suo principio di funzionamento. Attraverso questo articolo, speriamo di comprendere la struttura di base dei motori passo-passo con bobine fisse e magneti permanenti rotanti.
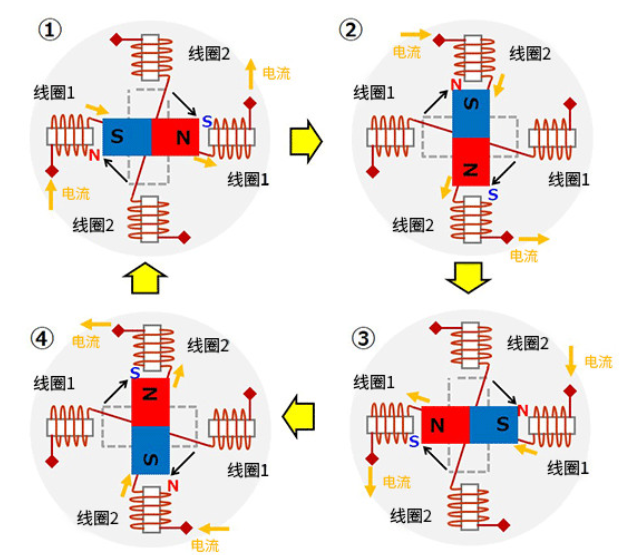
Principio di funzionamento di base del motore passo-passo (eccitazione monofase)
Il diagramma seguente viene utilizzato per introdurre il principio di funzionamento di base di un motore passo-passo. Questo è un esempio di eccitazione per ciascuna fase (insieme di bobine) delle bobine di tipo bipolare bifase sopra. La premessa del diagramma è che lo stato cambia da ① a ④. Le bobine sono costituite rispettivamente dalla bobina 1 e dalla bobina 2. Inoltre, le frecce di corrente indicano la direzione del flusso di corrente.
①
・Fare fluire la corrente dal lato sinistro della bobina 1 e fuori dal lato destro della bobina 1.
・Non consentire alla corrente di fluire attraverso la bobina 2.
・A questo punto, il lato interno della bobina sinistra 1 diventa N e il lato interno della bobina destra 1 diventa S.
・Di conseguenza, il magnete permanente centrale viene attratto dal campo magnetico della bobina 1 e si sposta sul lato sinistro S e sul lato destro N e si ferma.
②
・La corrente della bobina 1 viene interrotta in modo che la corrente fluisca dal lato superiore della bobina 2 e fuori dal lato inferiore della bobina 2.
・Il lato interno della bobina superiore 2 cambia in N e il lato interno della bobina inferiore 2 cambia in S.
・Il magnete permanente è attratto dal suo campo magnetico e ruota di 90° in senso orario per fermarsi.
③
・La corrente della bobina 2 viene interrotta in modo che la corrente fluisca dal lato destro della bobina 1 e fuori dal lato sinistro della bobina 1.
・Il lato interno della bobina sinistra 1 diventa S e il lato interno della bobina destra 1 diventa N.
・Il magnete permanente è attratto dal suo campo magnetico e ruota in senso orario di altri 90° per fermarsi.
④
・Arrestare la corrente nella bobina 1 in modo che la corrente fluisca dal lato inferiore della bobina 2 e fuori dal lato superiore della bobina 2.
・Il lato interno della bobina superiore 2 diventa S e il lato interno della bobina inferiore 2 diventa N.
・Il magnete permanente è attratto dal suo campo magnetico e ruota in senso orario di altri 90° per fermarsi.
Il motore passo-passo può essere ruotato commutando la corrente che scorre attraverso la bobina tramite il circuito elettronico nell'ordine da ① a ④ sopra. In questo esempio, ogni azione di commutazione provoca una rotazione di 90° del motore passo-passo.
Inoltre, quando la corrente scorre continuamente attraverso una bobina, lo stato di arresto può essere mantenuto e il motore passo-passo può avere una coppia di mantenimento. Per inciso, se l'ordine della corrente che scorre attraverso la bobina viene invertito, il motore passo-passo può essere fatto ruotare all'indietro.
Trova un produttore di motori industriali professionale: Dongchun Motor China
 Salta al contenuto
Salta al contenuto