Sappiamo tutti che il convertitore di frequenza è una tecnologia che dovrebbe essere padroneggiata nei lavori elettrici e che l'utilizzo di un convertitore di frequenza per controllare i motori è un metodo comune nel controllo elettrico; alcuni richiedono anche competenza.
Oggi riassumeremo e organizzeremo le conoscenze rilevanti con la nostra conoscenza limitata. Il contenuto può essere ripetitivo, ma l'obiettivo è condividere con tutti il meraviglioso rapporto tra convertitori di frequenza e motori.
Innanzitutto, perché utilizzare un convertitore di frequenza per controllare il motore?
Per prima cosa comprendiamo brevemente questi due dispositivi.
Il motore è un carico induttivo che impedisce variazioni di corrente. Durante l'avvio, produrrà un grande cambiamento nella corrente.
Un convertitore di frequenza è un dispositivo che sfrutta l'azione on-off dei dispositivi a semiconduttore di potenza per trasformare la frequenza di alimentazione in un'altra frequenza di energia elettrica a fini di controllo. È costituito principalmente da due parti: il circuito principale (modulo raddrizzatore, condensatore elettrolitico e modulo inverter) e il circuito di controllo (scheda di alimentazione a commutazione e scheda di controllo).
Per ridurre la corrente di avviamento del motore elettrico, soprattutto per i motori di potenza maggiore, all'aumentare della potenza aumenta anche la corrente di avviamento. Una corrente di avviamento eccessiva può comportare un carico maggiore sulla rete di distribuzione dell'energia. Tuttavia, un convertitore di frequenza può risolvere questo problema consentendo un avviamento graduale senza causare correnti di avviamento eccessive.
Un'altra funzione dell'utilizzo di un convertitore di frequenza è la regolazione della velocità dei motori. In molti casi, il controllo della velocità del motore è necessario per ottenere una migliore efficienza produttiva. I convertitori di frequenza sono sempre stati noti per la loro capacità di regolare la velocità modificando la frequenza della sorgente.
Quali sono i metodi di controllo dei convertitori di frequenza?
I cinque modi più comunemente utilizzati per controllare i motori con convertitori di frequenza sono i seguenti:
La tensione di uscita del convertitore di frequenza per uso generale a bassa tensione è 380-650 V, la potenza di uscita è 0,75-400 kW, la frequenza operativa è 0-400 Hz e il suo circuito principale adotta il circuito AC-DC-AC. Il suo metodo di controllo ha attraversato quattro generazioni.
Metodo di controllo della modulazione di larghezza di impulso sinusoidale (SPWM) con U/f=C
Le sue caratteristiche sono la struttura semplice del circuito di controllo, il basso costo, la buona durezza meccanica e la capacità di soddisfare i requisiti di regolare velocità della trasmissione generale. È stato ampiamente utilizzato in vari settori.
Tuttavia, alle basse frequenze, a causa della tensione di uscita inferiore e della significativa influenza della coppia sulla caduta della resistenza dello statore, la coppia di uscita massima diminuisce.
Inoltre, le sue caratteristiche meccaniche non sono poi così dure come quelle dei motori DC.
La capacità di coppia dinamica e le prestazioni di regolazione della velocità statica non sono ancora soddisfacenti. Anche le prestazioni del sistema non sono elevate; la curva di controllo cambierà al variare del carico; la risposta della coppia è lenta; il tasso di utilizzo della coppia del motore non è elevato; le prestazioni diminuiscono a basse velocità a causa della resistenza dello statore e degli effetti della zona morta dell'inverter esistenti mentre la stabilità si deteriora, ecc. Pertanto le persone hanno studiato la regolazione della velocità a frequenza variabile controllata da vettori.
Metodo di controllo della modulazione di larghezza di impulso vettoriale spaziale (SVPWM).
Si basa sull'effetto di generazione complessiva della forma d'onda trifase, con l'obiettivo di approssimare la traiettoria circolare ideale del campo magnetico rotante del traferro del motore. Genera una forma d'onda di modulazione trifase e la controlla approssimando un cerchio utilizzando un poligono inscritto.
Dopo l'uso pratico, sono stati apportati miglioramenti introducendo la compensazione della frequenza per eliminare gli errori di controllo della velocità; stima dell'ampiezza del flusso attraverso la retroazione per eliminare l'influenza della resistenza statorica alle basse velocità; e anelli di chiusura per la tensione e la corrente di uscita per migliorare la precisione e la stabilità dinamica.
Tuttavia, ci sono molti collegamenti al circuito di controllo, non è stata introdotta la regolazione della coppia, quindi le prestazioni del sistema non sono state sostanzialmente migliorate.
Il metodo di regolazione della velocità a frequenza variabile nel controllo vettoriale consiste nel convertire le correnti statoriche Ia, Ib, Ic dei motori asincroni in correnti CA bifase Ia1Ib1 sotto sistemi di coordinate stazionarie attraverso la trasformazione da trifase a bifase. Quindi vengono trasformati in correnti CC Im1 e It1 sotto sistemi di coordinate rotanti sincroni attraverso la trasformazione della rotazione dell'orientamento del campo del rotore (dove Im1 corrisponde alla corrente di eccitazione nei motori CC; It1 corrisponde alla corrente di armatura proporzionale alla coppia). La quantità di controllo per i motori CC si ottiene imitando i loro metodi di controllo. Dopo aver eseguito le corrispondenti trasformazioni inverse delle coordinate, è possibile ottenere il controllo del motore asincrono.
In sostanza, i motori CA sono equivalenti ai motori CC e il controllo indipendente viene applicato separatamente per i componenti di velocità e campo magnetico. Controllando prima il flusso del rotore, quindi scomponendo la corrente dello statore in componenti di coppia e campo magnetico, seguiti dal controllo ortogonale o disaccoppiato tramite trasformazioni di coordinate. La proposta del metodo di controllo vettoriale è stata rivoluzionaria ma difficile nella pratica a causa delle difficoltà di osservazione accurata del flusso del rotore che influisce notevolmente sulle caratteristiche del sistema, nonché delle complesse trasformazioni della rotazione vettoriale utilizzate durante i controlli equivalenti del motore CC, rendendo i risultati effettivi difficili da ottenere risultati analitici ideali.
Controllare il flusso magnetico dello statore introducendo un osservatore del flusso magnetico dello statore per ottenere un controllo senza sensori;
L'identificazione automatica (ID) si basa su modelli matematici accurati del motore per identificare automaticamente i parametri del motore;
Calcola la coppia effettiva, il flusso magnetico dello statore e la velocità del rotore in tempo reale in base ai valori effettivi corrispondenti all'impedenza dello statore, alla mutua induttanza, ai fattori di saturazione magnetica, all'inerzia, ecc.;
Realizza il controllo Band-Band generando segnali PWM in base al flusso magnetico e alla coppia per controllare lo stato di commutazione dell'inverter.
Il convertitore di frequenza CA di tipo a matrice ha una risposta di coppia rapida (<2ms), precisione ad alta velocità (±2%, senza feedback PG), elevata precisione di coppia (<+3%); allo stesso tempo, ha anche una coppia di avviamento più elevata e un'elevata precisione di coppia, soprattutto a basse velocità (inclusa la velocità 0), può produrre il 150%~200% della coppia nominale.
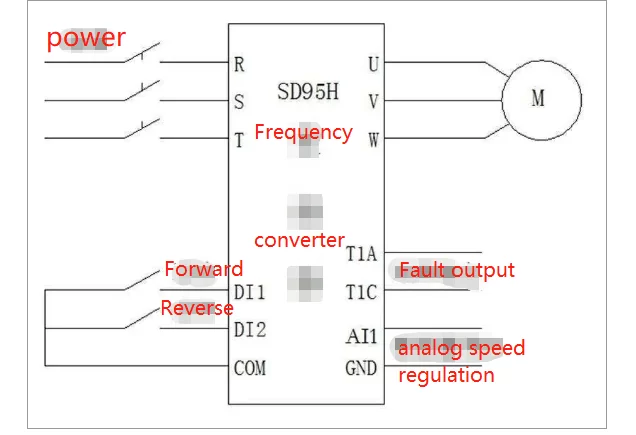
In che modo il convertitore di frequenza controlla il motore? Come sono collegati insieme?
Il cablaggio del convertitore di frequenza per controllare un motore è relativamente semplice, simile al cablaggio di un contattore. Tre fili di alimentazione principale sono collegati e quindi inviati al motore. Tuttavia, esistono diversi modi per controllare il convertitore di frequenza.
Per prima cosa diamo un'occhiata ai collegamenti dei terminali del convertitore di frequenza. Sebbene esistano molte marche e diversi metodi di cablaggio per i convertitori di frequenza, la maggior parte di essi ha collegamenti terminali simili. Generalmente includono ingressi di commutazione per la rotazione avanti e indietro utilizzati per controllare l'avvio e l'inversione dei motori; terminali di feedback utilizzati per fornire feedback sullo stato operativo come frequenza di funzionamento, velocità, stato di guasto ecc.; controlli di impostazione della velocità che possono essere regolati tramite potenziometri o pulsanti a seconda delle diverse tipologie di convertitori.
Il controllo può essere ottenuto tramite cablaggio fisico o reti di comunicazione. Molti azionamenti a frequenza variabile ora supportano il controllo della comunicazione, consentendo la trasmissione di avvio/arresto del motore, rotazione avanti/indietro, regolazione della velocità e informazioni di feedback attraverso la linea di comunicazione.
Quando la velocità di rotazione (frequenza) del motore cambia, cosa succede alla sua coppia in uscita?
La coppia iniziale e la coppia massima quando azionate da un convertitore di frequenza dovrebbero essere inferiori rispetto a quando azionate direttamente dalla rete elettrica.
Quando il motore è alimentato dalla rete elettrica, si verifica un grande impatto in avvio e in accelerazione. Tuttavia, se alimentato da un convertitore di frequenza, questi impatti sono più deboli. L'avvio diretto alla frequenza di rete produrrà una grande corrente di avviamento. Quando si utilizza un convertitore di frequenza, la tensione di uscita e la frequenza del convertitore vengono aggiunte gradualmente al motore, quindi la corrente di avviamento e l'impatto sul motore sono minori.
Solitamente, al diminuire della frequenza (diminuzione della velocità), diminuisce anche la coppia generata dal motore. I dati effettivi relativi a questa diminuzione possono essere trovati in alcuni manuali per convertitori di frequenza.
Utilizzando un metodo di controllo vettoriale con inverter di controllo del flusso magnetico, è possibile migliorare la coppia insufficiente a bassa velocità dei motori in modo che anche a basse velocità possa essere emessa una coppia sufficiente.
Quando si regolano frequenze superiori a 50 Hz con un azionamento a frequenza variabile (VFD), la coppia di uscita del motore diminuirà.
I motori convenzionali sono progettati e realizzati secondo gli standard di tensione 50Hz; anche le loro coppie nominali sono indicate entro questo intervallo di tensione. Pertanto, la regolazione della velocità al di sotto delle frequenze nominali è detta regolazione della velocità a coppia costante (T=Te,P<=Pe).
Poiché le frequenze di uscita del VFD superano i 50 Hz, la relazione lineare tra le coppie prodotte dai motori si riduce proporzionalmente all'aumentare delle frequenze.
Quando si funziona a velocità superiori a 50 Hz, è necessario prestare attenzione per evitare che si verifichino coppie di uscita insufficienti a causa delle dimensioni del carico sui motori elettrici.
Ad esempio, la coppia prodotta da un motore elettrico funzionante a 100 Hz si ridurrebbe di circa la metà rispetto a quella prodotta funzionando a 50 Hz.
Pertanto, la regolazione della velocità al di sopra delle frequenze nominali è detta regolazione della velocità a potenza costante (P=Ue*Ie).
Applicazione del convertitore di frequenza superiore a 50 Hz
Come sappiamo, per un motore specifico, la tensione e la corrente nominali sono costanti.
Se i valori nominali sia del convertitore di frequenza che del motore sono 15 kW/380 V/30 A, il motore può funzionare a frequenze superiori a 50 Hz.
Quando la velocità è 50 Hz, la tensione di uscita del convertitore di frequenza è 380 V e la corrente è 30 A. Se aumentiamo la frequenza di uscita a 60 Hz, la tensione e la corrente di uscita massime del convertitore di frequenza saranno ancora solo 380 V/30 A. Ovviamente, poiché la potenza in uscita rimane invariata, si parla di regolazione della velocità a potenza costante.
E la coppia in questo caso?
Poiché P=wT (P: potenza; w: velocità angolare; T: coppia), se P rimane costante ma w aumenta, allora T diminuirà di conseguenza.
La tensione statorica U=E+I*R (I: corrente; R: resistenza elettrica; E: forza elettromotrice indotta) di un motore,
Si può vedere che quando U e I rimangono invariati, anche E rimane invariato.
Ed E=kFX (k: costante; f: frequenza; X: flusso magnetico). Pertanto quando f cambia da 50-->60Hz,X diminuisce di conseguenza.
Per un motore, T=KIOX(K:costante;I:corrente;X:flusso magnetico). Pertanto al diminuire del flusso magnetico X, anche T diminuirà di conseguenza.
At less than or equal to 50 Hz,I*R is small so when U/f=E/f does not change,magnetic flux(X)is constant.Torque(T)and electric current(I)are proportional.This explains why overload(torque)capacity of a variable-frequency drive(VFD)is usually described by its overcurrent capacity,and referred to as "constant-torque"speed regulation(rated current remains unchanged-->la coppia massima rimane invariata).
Conclusione: Quando la frequenza di uscita di un convertitore di frequenza aumenta oltre i 50 Hz, la coppia di uscita del motore diminuirà.
Altri fattori legati alla coppia in uscita
La capacità di riscaldamento e raffreddamento determina la capacità di corrente in uscita dell'inverter, influenzando così la capacità di coppia in uscita dell'inverter.
Frequenza portante: la corrente nominale indicata dagli inverter generali si basa sul valore che può essere emesso continuamente alla frequenza portante più alta e alla temperatura ambiente più alta. La riduzione della frequenza portante non influirà sulla corrente del motore. Tuttavia, il riscaldamento dei componenti diminuirà.
Temperatura ambiente: proprio come non è necessario aumentare il valore della corrente di protezione dell'inverter quando viene rilevata una bassa temperatura circostante.
Altitudine: L’aumento dell’altitudine influisce sia sulla dissipazione del calore che sulle prestazioni di isolamento. In genere, al di sotto dei 1.000 m può essere ignorato ed è sufficiente una riduzione della capacità del 5% ogni 1.000 metri al di sopra di questo livello.
Come regolare la frequenza del motore controllato dal convertitore di frequenza?
Nel riepilogo riportato sopra, abbiamo imparato perché è necessario utilizzare un convertitore di frequenza per controllare il motore e come funziona. Il controllo del motore da parte del convertitore di frequenza può essere riassunto in due punti: primo, controllo della tensione di avviamento e della frequenza del motore con il convertitore di frequenza per ottenere un avvio e un arresto graduali; in secondo luogo, regolare la velocità del motore modificandone la frequenza utilizzando un convertitore di frequenza.
Gli utenti della rete hanno sollevato una domanda pratica: qual è la frequenza più bassa che può essere regolata quando si controlla un normale motore con un convertitore di frequenza? Attualmente è stato regolato a 60Hz e il leader mi ha chiesto di continuare ad aumentare il numero di Hz. Il piano è regolarlo su 100Hz. Qualcuno lo ha mai regolato a 100Hz? (In situazioni simili, quali fattori devono essere considerati?)
Vediamo come rispondono i netizen:
Netizen lpl53: Abbiamo raggiunto i 200HZ sulle lavatrici industriali, ma la corrente non è elevata.
Netizen26584: Il motore della rettificatrice è generalmente compreso tra 100 e 110...
Netizen 82252031: Se c'è abbastanza potenza e non c'è corrente eccessiva nel motore, può funzionare. Tuttavia, è necessario prestare attenzione alla misurazione della temperatura dei cuscinetti del motore, al rumore e alle vibrazioni anomali. Un motore a frequenza variabile funziona a 70-80 Hz per lungo tempo; I motori a sei poli sono facili da provare mentre i motori a due poli richiedono cautela.
Netizen fsjnzhouyan: Dipende dalla qualità delle lamiere di acciaio al silicio utilizzate nei motori. Nei casi d'uso precedenti, di solito non si verificavano problemi fino a circa 85Hz; tuttavia, molti motori non riescono a raggiungere la velocità nominale dopo essere stati regolati fino a circa 90 Hz a causa della saturazione magnetica.
Netizen ZCMY: È meglio se sostituisci i cuscinetti del motore con quelli ad alta velocità. Testare anche le vibrazioni e assicurarsi che siano adatti a carichi come ventilatori o pompe dell'acqua.
Netizen mengx9806: Una volta l'ho regolato fino a 1210HZ utilizzando l'azionamento a frequenza variabile della serie A1000 di macchine elettriche Dongyuan che ha funzionato senza problemi per due anni consecutivi senza che si verificassero grossi problemi, anche se potrebbero verificarsi problemi minori se qualcosa va storto.
Netizen 68957:Ho provato a regolarlo fino a 180, ma ha funzionato solo per un breve periodo.
Netizen 1531214350: Ho già riparato lavatrici e il motore era normale. Funzionava a 150 HZ durante la centrifuga.
Ya de Ya: se la frequenza di un motore normale è superiore del 20% alla frequenza nominale, la differenza di velocità aumenterà; all'aumentare della frequenza aumenta anche questa differenza di velocità.
Netizen kdrjl: Sembra che la comprensione della struttura di base e dell'utilizzo dei motori a induzione CA sia ancora troppo scarsa. Il limite di velocità massimo per la regolazione dei motori a induzione non si trova nei convertitori di frequenza. In generale, i normali azionamenti a frequenza variabile funzionano a frequenze non inferiori a 400 Hz in modalità V/F (ad esempio l'azionamento a frequenza variabile di Siemens funziona a 600 Hz). Per il controllo vettoriale, il limite massimo della frequenza operativa è 200-300 Hz mentre il servocontrollo ha limiti ancora più elevati. Pertanto, se desideri regolare la velocità del tuo motore a induzione fino a 100 Hz utilizzando un variatore di frequenza, non ci sono ostacoli o dubbi tecnici al riguardo.
La struttura meccanica del rotore di un motore a induzione, come la sua struttura a gabbia, ne determina la resistenza meccanica che è correlata alla velocità di rotazione massima prevista dal progetto; più velocemente ruota, maggiore diventa la forza centrifuga. Pertanto, generalmente soddisfa le specifiche di progettazione in base alle velocità di rotazione massime e le loro resistenze meccaniche non possono essere infinitamente grandi. Anche i cuscinetti del rotore hanno un limite massimo di rotazione. Quindi, quando si superano questi valori, è necessario capire quali sono questi limiti e, se necessario, sostituirli con cuscinetti ad alta velocità.
Infine, il debugging del bilanciamento dinamico e l'impostazione del rotore non devono superare i parametri indicati dal produttore.
In sintesi, quando si regola la velocità di un motore a induzione attraverso un'applicazione di azionamento a frequenza variabile superiore a 100 Hz, è importante innanzitutto consultare i produttori se è possibile farlo o richiedere invece motori personalizzati, per garantire l'affidabilità in condizioni di alta velocità. Se si decide di non rivolgersi ai produttori, è necessario prima determinare il test di equilibrio dinamico del rotore e quindi confermare la velocità di rotazione massima del cuscinetto.
Se supera questo valore, è necessario sostituirli con cuscinetti ad alta velocità in grado di soddisfare i requisiti in loco. È inoltre necessario considerare i problemi di dissipazione del calore.
Infine, in base all'esperienza, i motori a induzione con potenza inferiore a 100 kW dovrebbero essere relativamente adatti a funzionare a frequenze entro 100 Hz; tuttavia, è meglio personalizzare quelli che superano i 100 kW piuttosto che scegliere prodotti convenzionali per uso generale.
Netizen lvpretend: Dipende principalmente dal motore stesso. Se si tratta originariamente di un motore bipolare ad alta potenza, è necessario prestare attenzione. Le lavatrici industriali sono esempi di funzionamento frequente a velocità eccessiva, ma le loro velocità nominali sono generalmente basse, per lo più motori a sei poli. Ho visto motori a quattro poli raggiungere fino a 120 Hz.
 Salta al contenuto
Salta al contenuto