 Salta al contenuto
Salta al contenuto Qual è la differenza tra un motore brushless e un motore con spazzole?
Qual è la differenza tra un motore sincrono e un motore asincrono?
Che ne dici del motore a induzione con rotore avvolto?
Tutti i servomotori sono motori CA?
Tutti i servomotori sono motori sincroni?
I motori passo-passo appartengono ai motori DC o ai motori AC?
Un servomotore è un servomotore? ......
I saggi una volta dissero: se la conoscenza non è sistematica, qual è la differenza tra essa e un paragrafo?
Ma il saggio libro su quel testo prolisso, quella terminologia fantasiosa, quella spiegazione plausibile, guardano davvero le persone tra le nuvole.
Ho anche cercato a lungo in Internet, non ho trovato una spiegazione più sistematica della struttura dei motori elettrici e del principio di classificazione, quindi hanno fatto molti sforzi per interrogare e organizzare una copia.
Questo articolo cerca di spiegare la conoscenza sistematica in un linguaggio semplice e utilizza molte animazioni e immagini per esprimere in modo vivido la conoscenza oscura.
A causa delle mie limitate conoscenze è inevitabile che ci siano molti errori, correggete gli esperti, non esitate a dare consigli.
1. uno schema per spiegare i tipi base di motori elettrici

2. Motore elettrico CC - motore a spazzole
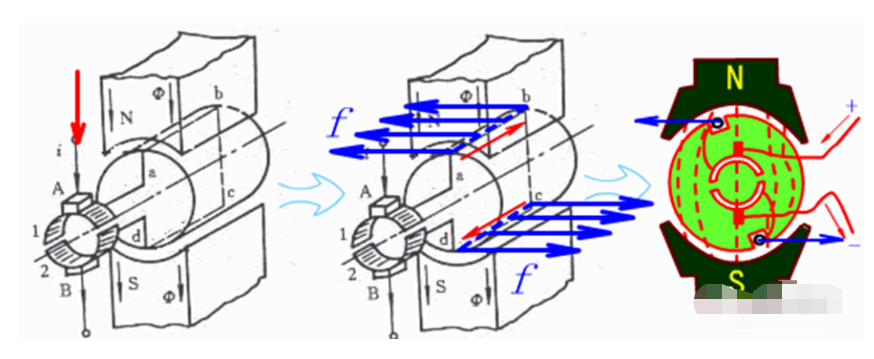
Leggi la fisica della scuola secondaria della feccia di bulli, per studiare il conduttore energizzato nella forza del campo magnetico di quella cosa, abbiamo addestrato la mano sinistra a un palmo rotto, che è esattamente il principio del motore a induzione CC.
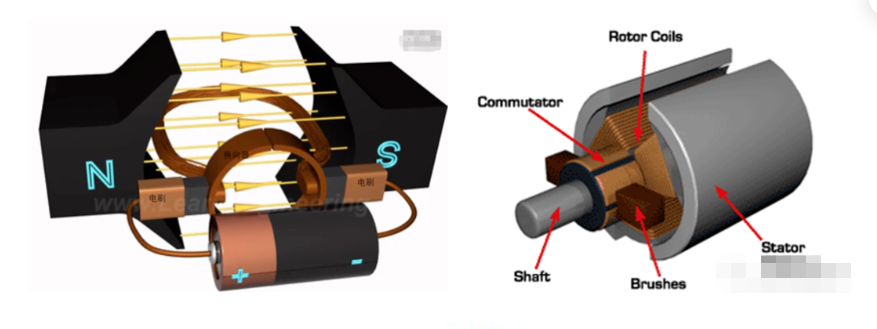
Tutti i motori elettrici sono composti da statore e rotore, nei motori elettrici DC, per far girare il rotore, è necessario cambiare costantemente la direzione della corrente, altrimenti il rotore può girare solo mezzo giro, è come il pedale di una bicicletta .
Ecco perché i motori CC necessitano di commutatori.
In generale, i motori DC con spazzole includono motori con spazzole e motori brushless.
Il motore a spazzole è anche chiamato motore a induzione CC o motore a spazzole di carbone, spesso indicato come motore CC a spazzole.
Utilizza la commutazione meccanica, il polo esterno non muove la bobina interna (armatura), il commutatore e la bobina del rotore ruotano insieme, le spazzole e i magneti non si muovono, quindi l'attrito del commutatore e della spazzola completa la commutazione della direzione della corrente.
Svantaggi del motore della spazzola.
1, commutazione meccanica delle scintille generate dal commutatore e dall'attrito della spazzola, interferenza elettromagnetica, rumore elevato, breve durata.
2, scarsa affidabilità, molti guasti, che richiedono una manutenzione frequente.
3, a causa della presenza del commutatore, che limita l'inerzia del rotore, limita la velocità massima, influenzando le prestazioni dinamiche.
Poiché ha così tanti difetti, è ancora comunemente usato, perché ha una coppia elevata, una struttura semplice, una manutenzione facile (ad esempio, cambiare le spazzole di carbone), ed è economico.
2. Motori CC - motori brushless
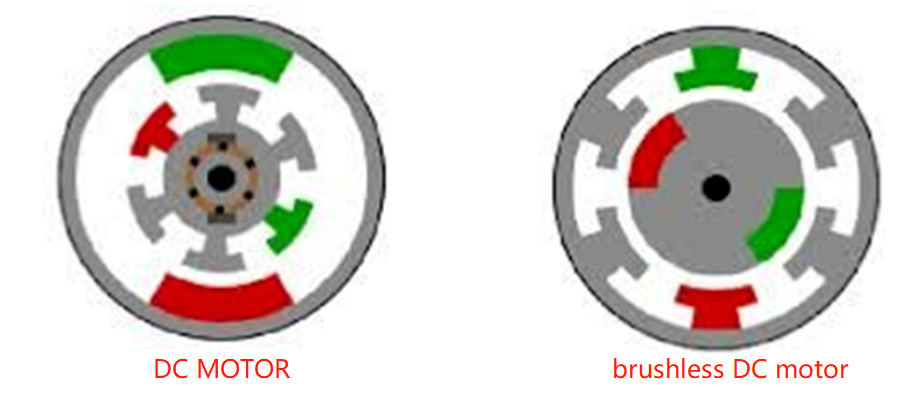
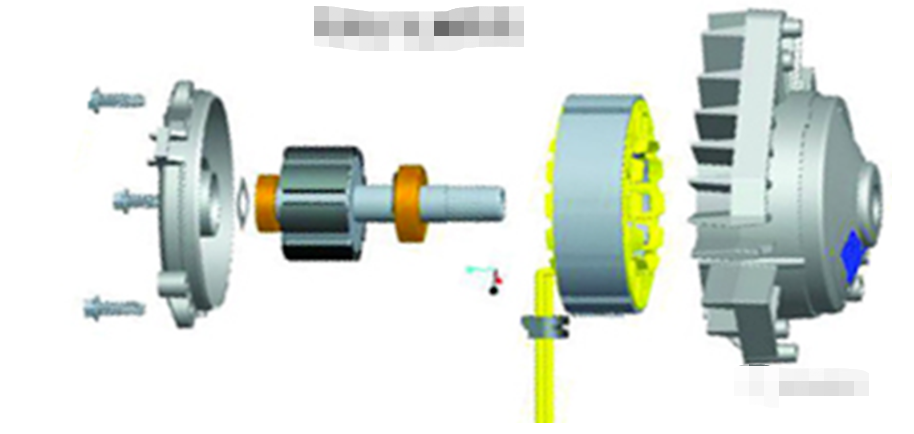
Il motore brushless è anche chiamato motore DC inverter (BLDC) in alcuni campi, utilizza la commutazione elettronica (sensore Hall), la bobina (armatura) non si muove, i poli magnetici si muovono, quindi il magnete permanente può essere all'esterno o all'interno della bobina , quindi c'è un motore brushless a rotore esterno e un motore brushless a rotore interno
I motori brushless sono costruiti allo stesso modo dei motori sincroni a magneti permanenti.
Tuttavia, un singolo motore brushless non costituisce un sistema di alimentazione completo. Fondamentalmente il brushless deve essere controllato da un controller brushless, noto anche come ESC, per ottenere un funzionamento continuo.
È il regolatore elettronico brushless (ESC) che ne determina realmente le prestazioni.
Generalmente, esistono due tipi di correnti di azionamento per i motori brushless, una è un'onda quadra e l'altra è un'onda sinusoidale.
A volte il primo è chiamato motore brushless CC e il secondo è chiamato servomotore CA, che è esattamente un tipo di servomotore CA.
I motori brushless funzionano in diversi modi e possono essere suddivisi in motori brushless con rotore interno e motori brushless con rotore esterno.
Il rotore interno è trifase, il che è più costoso.
Il rotore esterno è solitamente utilizzato in monofase, il prezzo della gente, la produzione di massa è stata vicina al motore a spazzole di carbone, quindi negli ultimi anni è ampiamente utilizzato.
Il prezzo del rotore esterno trifase è vicino al prezzo del rotore interno.
Bene, come puoi immaginare, lo svantaggio dei motori a spazzole è lo scopo dei motori brushless.
Ha alta efficienza, basso consumo energetico, basso rumore, lunga durata, alta affidabilità, servocontrollo, velocità di conversione di frequenza continua (fino a una velocità molto elevata) e altri vantaggi.
È relativamente più piccolo del motore DC a spazzole, il controllo rispetto al motore AC asincrono è semplice, la coppia di avviamento ha una grande capacità di sovraccarico, per quanto riguarda gli svantaggi... è più costoso della spazzola, cattiva manutenzione.
2. Motore CC: principio di controllo della velocità
Regolazione della velocità del motore a induzione DC: la cosiddetta regolazione della velocità, ovvero regolando la velocità del motore per ottenere la coppia richiesta.
motore CC a magnete permanente regolando la tensione, la resistenza in serie, modificando l'eccitazione può essere la velocità, ma la regolazione effettiva della tensione è la più conveniente e più comunemente utilizzata, l'uso principale della regolazione della velocità PWM.
PWM è in realtà attraverso l'interruttore ad alta velocità per ottenere la regolazione della tensione CC, un ciclo, aperto a lungo, la tensione media è alta, spento a lungo, la tensione media è bassa, molto comodo da regolare, purché l'interruttore velocità Finché la velocità di commutazione è sufficientemente elevata, le armoniche della rete sono inferiori e la corrente è più continua.
Tuttavia, le spazzole e il commutatore si usurano a lungo e allo stesso tempo si verifica un enorme cambiamento di corrente durante la commutazione, il che è molto facile che si producano scintille.
Il commutatore e le spazzole limitano la capacità e la velocità del motore a induzione DC, il che fa sì che la regolazione della velocità del motore a induzione DC incontri un collo di bottiglia.
Per i motori a induzione CC senza spazzole, il controllo della velocità controlla solo la tensione di ingresso sulla superficie.
Ma il sistema di controllo della frequenza di autocontrollo del motore (il motore CC senza spazzole è dotato di un rilevatore di posizione del rotore e di un altro dispositivo di acquisizione del segnale di posizione del rotore, che utilizza il segnale di posizione del rotore di questo dispositivo per controllare il momento di cambiamento di fase del dispositivo di controllo della frequenza di tensione variabile) controlla automaticamente la frequenza in base alla tensione variabile, che è quasi la stessa del motore DC (spazzolato), molto conveniente. Molto conveniente.
Poiché il rotore utilizza magneti permanenti, nessun avvolgimento di eccitazione speciale, a parità di capacità, il motore è più piccolo, più leggero, più efficiente, più compatto, funzionamento più affidabile, migliori prestazioni dinamiche, nella guida di veicoli elettrici e altri aspetti sono stati ampiamente utilizzati.
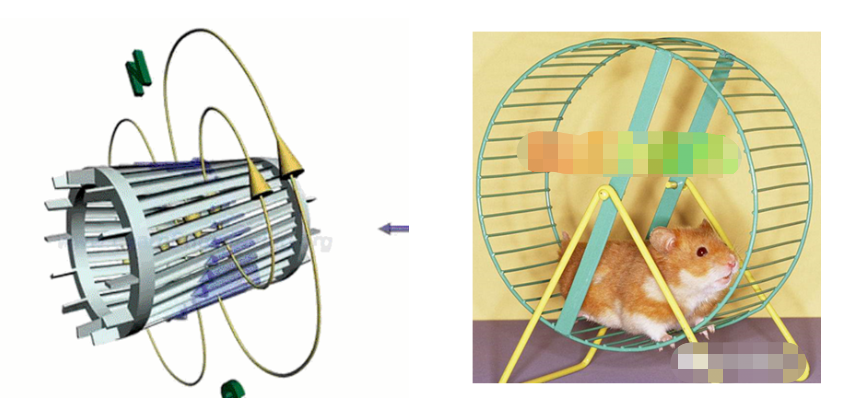
3. Motori CA trifase - motori asincroni
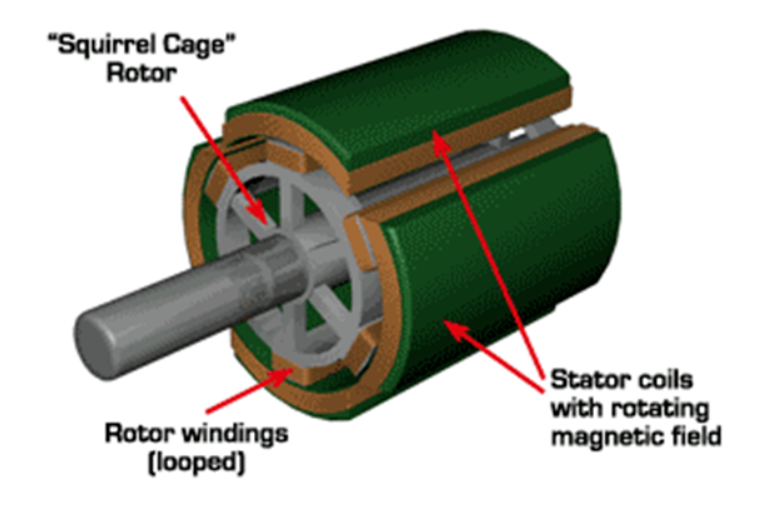
I motori CA sono suddivisi in motori sincroni e motori asincroni, i motori sincroni sono utilizzati principalmente nei generatori e i motori asincroni sono utilizzati principalmente nei motori elettrici. Sono motori a induzione a gabbia di scoiattolo.
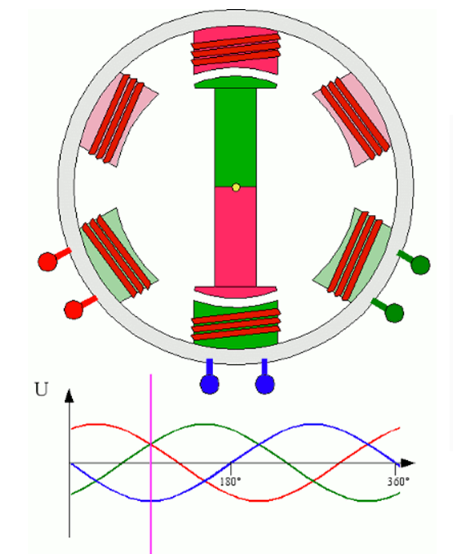
L'alloggiamento del motore è lo statore e sullo statore sono presenti tre avvolgimenti CA simmetrici.
Quando la sequenza delle tre fasi cambia, si forma un campo magnetico sintetico rotante e la velocità di rotazione del campo magnetico è la velocità sincrona.
La velocità sincrona n=60f/p, f è la frequenza, p è il numero di coppie polari, ad esempio, per un motore a 2 poli collegato alla rete nazionale 50Hz (ovvero il numero di coppie polari è 1 coppia), quindi la velocità n=60*50/1=3000 giri/min.
Allo stesso modo, la velocità sincrona dei motori a 4 poli, 6 poli e 8 poli è 1500, 1000 e 750.
I motori asincroni hanno un meccanismo semplice con un rotore a bobina chiusa, come il tipo a gabbia di scoiattolo.
La bobina del rotore taglierà il campo magnetico rotante per generare il potenziale elettrico indotto, che a sua volta genera la corrente indotta e infine il campo magnetico rotante.
Affinché il rotore diventi un elettromagnete e segua la rotazione del campo magnetico dello statore, la velocità del rotore deve essere tale < il campo magnetico rotante dello statore, in modo da tagliare le linee di induzione magnetica.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
Cioè, la velocità asincrona del rotore <velocità sincrona, c'è una differenza di velocità tra il campo magnetico del rotore e dello statore, quindi è chiamato motore asincrono.
La velocità nominale del motore asincrono varia leggermente da produttore a produttore, circa 2800+r/min per il motore a 2 poli, 1400+,950+,700+ per il motore asincrono a 4 poli, 6 poli e 8 poli.
La velocità del motore asincrono è elevata in assenza di carico e diminuisce in presenza di carico.
Il motore asincrono ha una struttura semplice, una facile manutenzione, un funzionamento affidabile e un prezzo economico, quindi è ampiamente utilizzato.
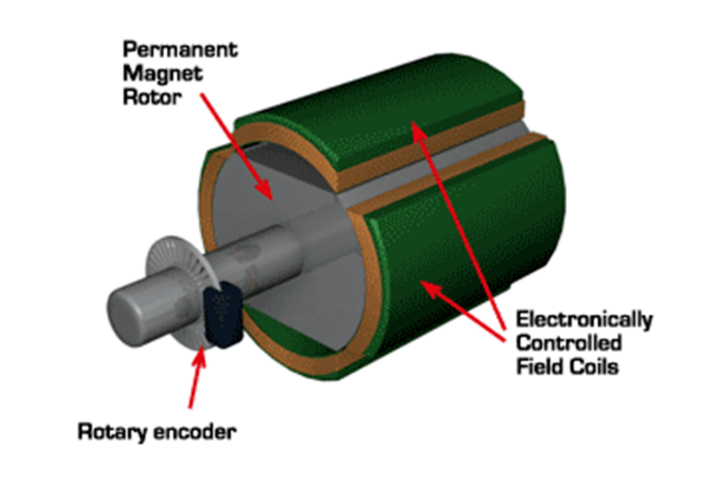
4. Motori CA trifase - motori sincroni
Motore sincrono.
Se si lascia che la velocità del rotore = velocità di rotazione del campo magnetico dello statore, diventa un motore sincrono, in questo momento è necessario trasformare lo statore in un elettromagnete o magnete permanente, cioè energizzare lo statore, in questo momento non è più necessario per tagliare la linea di induzione magnetica può ruotare, la velocità di rotazione e la velocità di rotazione del campo magnetico sono le stesse, cioè la formazione del motore sincrono.
La struttura del rotore del motore sincrono è più complessa dei motori asincroni, i prezzi elevati, nella vita produttiva non è ampiamente utilizzata come i motori asincroni, utilizzati principalmente come generatori, ora centrali termiche, centrali idroelettriche, turbine a vapore, turbine idrauliche sono fondamentalmente motori sincroni.
5. Motore CA trifase - regolazione della velocità dei motori elettrici asincroni
Regolazione della velocità del motore asincrono: teoricamente, il controllo della frequenza CA, della tensione o della resistenza del rotore del motore asincrono, la distribuzione dei poli del motore può essere la regolazione della velocità, ma in pratica è possibile ottenere una regolazione della velocità infinita con il metodo di regolazione della frequenza e della tensione.
A causa della gamma di velocità di regolazione della tensione non ampia, generalmente può essere utilizzata solo in requisiti di controllo della velocità non elevati, l'applicazione non è molto diffusa.
Regolazione della velocità a frequenza variabile: parlando di frequenza, forse ne abbiamo sentito parlare.
Il nome completo della conversione di frequenza è Frequenza variabile di tensione variabile (VVVF), il che significa che la tensione viene modificata quando viene modificata la frequenza, in modo che l'intervallo di velocità del motore asincrono sia sufficientemente ampio.
I convertitori di frequenza possono essere suddivisi in due grandi categorie: convertitori di frequenza AC-AC e convertitori di frequenza AC-DC.
Convertitore AC-DC: la potenza AC viene trasformata direttamente dall'elettronica di potenza in potenza AC di un'altra frequenza.
La frequenza di uscita massima non può superare la metà della frequenza di ingresso, quindi viene generalmente utilizzata solo in sistemi a bassa velocità e ad alta capacità e può eliminare la necessità di un enorme riduttore.
L'inverter AC-DC raddrizzerà prima la potenza AC in DC, quindi la trasformerà in AC con frequenza e tensione controllabili tramite inverter, con la tecnologia PWM, questo tipo di inverter può realizzare un'ampia gamma di tensione e frequenza variabili.
Per i veicoli elettrici, il motore asincrono è durevole, ha una forte capacità di sovraccarico e l'algoritmo di controllo è così maturo che può essere utilizzato completamente.
6. Motore CA trifase: regolazione della velocità del motore sincrono
Regolazione velocità motore sincrono:
Le macchine sincrone non hanno una velocità di turndown e la tensione di controllo non può modificare la velocità quando viene determinata la struttura, quindi prima della comparsa dei convertitori di frequenza, i motori sincroni erano completamente non regolati.
L'aspetto del convertitore di frequenza fa sì che il motore sincrono CA abbia anche un ampio intervallo di regolazione della velocità, poiché anche il suo rotore ha un'eccitazione indipendente (magnete permanente o eccitazione elettrica), il suo intervallo di regolazione della velocità è più ampio di quello del motore asincrono e il motore sincrono ha stata data una nuova vita.
Il sistema di controllo della velocità a frequenza variabile a tensione variabile del motore sincrono può essere suddiviso in controllo della velocità variabile controllato da altri e controllo della velocità variabile autocontrollato.
Per la regolazione della velocità a frequenza variabile controllata da altri, è simile alla regolazione della frequenza variabile del motore asincrono, che può essere controllato da SVPWM e altri metodi di controllo secondo il suo modello matematico, e le sue prestazioni sono migliori di quelle del normale motore asincrono CA.
Il motore sincrono con inverter autocontrollato aveva una varietà di nomi nel processo di sviluppo, come motore senza commutatore; quando si utilizzano magneti permanenti e si immette un'onda sinusoidale trifase, può essere chiamato motore sincrono a magnete permanente a onda sinusoidale; e se si immette un'onda quadra, allora può essere chiamato motore sincrono a magnete permanente a onda trapezoidale, sì, è simile alla macchina DC senza spazzole (BLDM) menzionata in precedenza, non riteniamo che un grande cerchio di rap si sia trasformato. Torna indietro, ma tu deve ora avere una comprensione più profonda della velocità variabile, quindi del motore CC senza spazzole quando si utilizza l'ingresso CC, ma l'uso della tecnologia di conversione della frequenza del motore sincrono (la stessa struttura del motore sincrono a magnete permanente), nel Modello 3 sull'uso del motore senza spazzole CC .
7. Motore asincrono CA monofase - motore CA monofase con eccitazione in serie (spazzola)
Motore CA monofase eccitato in serie, comunemente noto come motore eccitato in serie o motore universale (nome straniero UniversalMotor, chiamato a causa di AC e DC universale), l'avvolgimento dell'indotto e l'avvolgimento di eccitazione sono collegati in serie per funzionare insieme.
Il motore monofase eccitato in serie è anche chiamato motore eccitato in serie AC-DC a doppio uso, che può funzionare con alimentazione CA o CC.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
I vantaggi del motore monofase con eccitazione in serie sono l'alta velocità, l'elevata coppia di avviamento, le dimensioni ridotte, il peso leggero, la rotazione non facile da bloccare, un'ampia gamma di tensione applicabile e la velocità regolabile tramite il metodo di regolazione della tensione , che è semplice e facile da realizzare.
Pertanto, è ampiamente utilizzato negli utensili elettrici, come smerigliatrice angolare, trapano a mano, ecc.
La struttura del motore monofase eccitato in serie è molto simile a quella del motore DC eccitato in serie, la differenza principale è che il nucleo dello statore del motore monofase eccitato in serie deve essere realizzato in acciaio al silicio laminato, mentre i poli magnetici di DC può essere realizzato sia con struttura laminata che integrale.
La regolazione della velocità del motore eccitato in serie monofase, la maggior parte dei metodi utilizzati per regolare la tensione, consiste nel modificare il potenziale elettrico.
Il metodo di regolazione della tensione del motore monofase eccitato in serie utilizza una regolazione della tensione di sfasamento controllata, che utilizza la tensione di attivazione dell'SCR per restare indietro rispetto alla tensione di ingresso per ottenere l'innesco di sfasamento della tensione di ingresso.
Esistono metodi hardware e software nell'implementazione.
Il metodo della tensione regolata, che utilizza la tecnologia di controllo della velocità controllata dal silicio, ha una linea semplice, dimensioni ridotte dei componenti e altre caratteristiche di un metodo semplice ed efficace controllato dal silicio
(a) curva di variazione della corrente CA;
(b) Direzione di rotazione del rotore quando la corrente è una semionda positiva
(c) Direzione di rotazione del rotore quando la corrente è una semionda negativa

8. Motore asincrono CA monofase - motore CA monofase a gabbia di scoiattolo (senza spazzole)
La corrente monofase attraverso l'avvolgimento dell'indotto produce un campo magnetico pulsante anziché un campo magnetico rotante, pertanto i motori asincroni monofase non possono essere avviati automaticamente.
Per risolvere il problema dell'avviamento, i motori asincroni alimentati in CA monofase vengono spesso realizzati per essere bifase.
L'avvolgimento principale è alimentato direttamente dalla rete monofase; l'avvolgimento secondario è spazialmente diverso dall'avvolgimento principale di 90° (angolo elettrico, pari all'angolo meccanico diviso per il numero di coppie polari del motore).
L'avvolgimento secondario è collegato all'alimentazione CA monofase dopo il collegamento in serie del condensatore o del resistore, in modo che la corrente che lo attraversa e la corrente nell'avvolgimento principale abbiano una certa differenza di fase.
Ciò rende il campo magnetico sintetico un campo rotante ellittico, o forse anche vicino a un campo rotante circolare.
Il motore ottiene così la coppia di spunto.
Il motore che utilizza il metodo di separazione di fase della resistenza è economico, ad esempio, l'avvolgimento secondario può essere avvolto con un filo più sottile, ma l'effetto di separazione di fase è scarso e l'energia viene consumata nella resistenza.
Dopo che il motore si avvia e raggiunge una certa velocità, l'avvolgimento secondario viene solitamente rimosso automaticamente da un interruttore centrifugo montato sull'albero motore per ridurre le perdite resistive e migliorare l'efficienza operativa.
Viene generalmente utilizzato quando la richiesta di coppia iniziale non è elevata, come un piccolo tornio, un piccolo frigorifero, ecc. Lo svantaggio è che la velocità non può essere regolata.
È possibile avvicinare il campo magnetico sintetico del motore al campo magnetico rotante circolare in un determinato punto di lavoro del motore, in modo da ottenere migliori caratteristiche di funzionamento.
Affinché il motore asincrono a fase divisa ottenga migliori prestazioni di avviamento o migliori caratteristiche operative o entrambi, la capacità (quantità di valore) richiesta è diversa e può essere divisa in tre tipi
9. motori passo-passo - motori passo-passo ad anello aperto
I motori passo-passo (ad anello aperto) sono motori controllati ad anello aperto che convertono i segnali di impulsi elettrici in spostamenti angolari e sono estremamente ampiamente utilizzati.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
Il numero di impulsi può essere controllato per controllare la quantità di spostamento angolare, in modo da raggiungere lo scopo di un posizionamento accurato; allo stesso tempo, la frequenza degli impulsi può essere controllata per controllare la velocità e l'accelerazione della rotazione del motore, in modo da raggiungere lo scopo della regolazione della velocità.
Il motore passo-passo è un tipo di motore a induzione, che funziona utilizzando un circuito elettronico, ovvero un driver, per trasformare la potenza CC in una corrente di controllo della temporizzazione multifase alimentata in time-sharing.
Sebbene i motori passo-passo siano alimentati da corrente CC, non possono essere intesi come motori CC, che sono motori di potenza che convertono l'energia elettrica CC in energia meccanica, mentre i motori passo-passo sono motori di controllo ad anello aperto che convertono i segnali di impulsi elettrici in spostamento angolare.
10. Confronto tra motore passo-passo e servo passo-passo
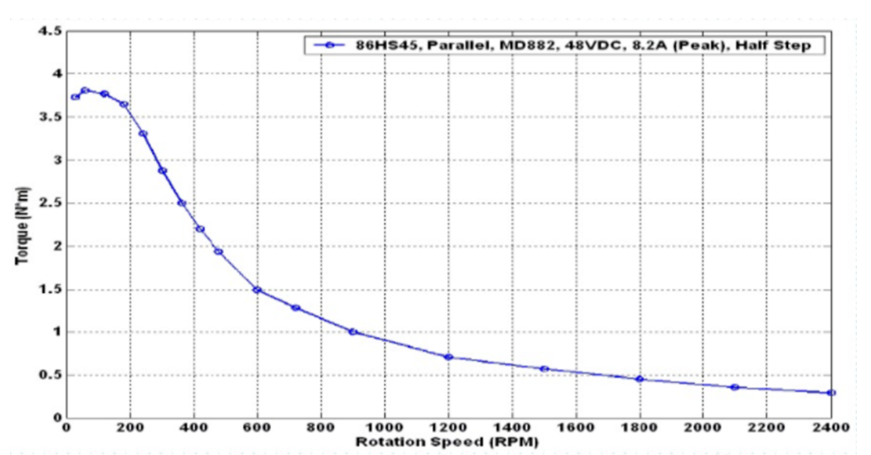
Si noti che i motori passo-passo vengono utilizzati in applicazioni a bassa velocità: non più di 1000 giri/min al minuto, il miglior intervallo di funzionamento è 150~500 giri/min (incremento a circuito chiuso fino a 1500).
Il motore passo-passo bifase a 60 ~ 70 giri/min è soggetto a fenomeni di risonanza a bassa velocità, che generano vibrazioni e rumore, che devono essere evitati modificando il rapporto di riduzione, aumentando la frazione fine, aggiungendo smorzatori magnetici, ecc.
Precauzioni per la precisione della suddivisione, quando il livello di suddivisione è maggiore di 4, la precisione dell'angolo di passo non può essere garantita, requisiti di alta precisione, è meglio passare a più fasi (ad esempio, angolo di passo più piccolo) del motore passo-passo o di passo-passo ad anello, servomotore.
Motore passo-passo (anello aperto) e servomotore 7 diversi.
Una precisione di controllo: la precisione di controllo del servomotore può essere impostata in base all'encoder, maggiore precisione.
B caratteristiche a bassa frequenza: i motori passo-passo sono soggetti a vibrazioni a basse frequenze, i servomotori no.
C caratteristiche momento-frequenza: la coppia del motore passo-passo diminuisce con l'aumento della velocità, quindi la sua velocità operativa massima è generalmente in <1000 giri/min, il servomotore alla velocità nominale (generalmente 3000 giri/min) può produrre la coppia nominale, alla velocità nominale superiore alla potenza costante, la velocità massima fino a 5000 giri/min;.
D capacità di sovraccarico: il motore passo-passo non può essere sovraccaricato, la coppia massima del servomotore può essere sovraccaricata 3 volte.
E prestazioni operative: motore passo-passo per controllo ad anello aperto, servomotore per controllo ad anello chiuso.
Risposta velocità F: tempo di avvio del motore passo-passo 0,15 ~ 0,5 s, servomotore 0,05 ~ 0,1, il più veloce 0,01 s per raggiungere i 3000 giri/min.
Indicatori di efficienza G: efficienza del motore passo-passo di circa il 60%, servomotore di circa l'80%.
Nell'uso reale troveremo: servomotore costoso, costoso tra molti, quindi i motori sincroni sono più ampiamente utilizzati, soprattutto nei requisiti di precisione di posizionamento non sono molto elevati, la trasmissione a cinghia sincrona, il trasportatore a cinghia piatta e in altre occasioni spesso utilizzano motori passo-passo.
11. Motori passo-passo - motori passo-passo ad anello chiuso
Motori passo-passo ad anello chiuso: oltre ai motori passo-passo ad anello aperto, esistono motori passo-passo che hanno un encoder aggiunto all'estremità del motore, consentendo il controllo ad anello chiuso.
Il controllo ad anello chiuso dei motori passo-passo utilizza il feedback di posizione e/o il feedback di velocità per determinare le transizioni di fase appropriate alla posizione del rotore, il che può migliorare notevolmente le prestazioni dei motori passo-passo.
Servosistemi senza fenomeni di fuori passo.
Vantaggi dei motori passo-passo ad anello chiuso.
1. Risposta ad alta velocità. Rispetto ai motori adatti, lo stepper ad anello chiuso segue molto bene i comandi di posizionamento, quindi il tempo di posizionamento è molto breve. Nell'applicazione di avviamenti/arresti frequenti, il tempo di posizionamento può essere notevolmente ridotto.
2. Genera più coppia rispetto al normale servo. Compensa la mancanza di perdita di passo e di vibrazioni a bassa velocità del normale sistema passo-passo.
3. È possibile generare una coppia elevata anche con un carico del 100%, senza perdita di funzionamento a passi, senza considerare la perdita di coppia e altri problemi come i normali sistemi a passi.
4. Applicando l'azionamento a circuito chiuso, l'efficienza può essere aumentata a 7,8 volte, la potenza di uscita può essere aumentata a 3,3 volte e la velocità può essere aumentata a 3,6 volte.
Può ottenere una velocità di marcia più elevata, una velocità più stabile e più fluida rispetto al controllo ad anello aperto.
5. Il motore passo-passo sarà completamente fermo quando si ferma, senza il fenomeno delle microvibrazioni del normale servo.
Può sostituire l'applicazione di servosistemi generici quando è richiesto un posizionamento a basso costo e ad alta precisione.
12. Confronto tra motore passo-passo e servo passo-passo a circuito chiuso
I motori passo-passo ad anello chiuso regolano automaticamente la dimensione della corrente dell'avvolgimento in base alle dimensioni del carico, il calore e le vibrazioni sono inferiori rispetto allo passo-passo ad anello aperto, c'è un feedback dell'encoder quindi la precisione è superiore rispetto ai normali motori passo-passo, la risposta del motore rispetto ad anello aperto il passo-passo è più lento dei servomotori più veloci, si verifica un errore di posizione durante il funzionamento, l'errore diminuirà gradualmente in millisecondi dopo l'interruzione del comando.
Coppia ad alta velocità rispetto allo stepper ad anello aperto, applicazioni comuni nell'occasione 0-1500 giri/min.
In sintesi: il motore passo-passo a circuito chiuso a basso costo, alta efficienza, nessun jitter, nessuna microvibrazione di arresto, elevata rigidità, nessuna rettifica, alta velocità, elevata risposta dinamica, ecc., è la sostituzione di servosistemi ad alto costo, sistemi passo-passo a circuito aperto di fascia bassa e altre soluzioni economicamente vantaggiose
13. Servomotore - Servomotore generale
Il servomotore (servomotore), chiamato anche motore attuatore, può rendere la velocità di controllo, la precisione della posizione molto accurata, può convertire il segnale di tensione in coppia e velocità per azionare l'oggetto di controllo.
A differenza della struttura principale del motore passo-passo, il servomotore è un motore CC standard o un motore a induzione CA poiché il circuito di controllo è posizionato all'esterno del motore e la parte del motore all'interno.
Il servomotore si basa sugli impulsi per il posizionamento. Quando il servomotore riceve 1 impulso, ruota di un angolo corrispondente a 1 impulso.
Ogni volta che il motore ruota di un angolo, l'encoder invierà il numero corrispondente di impulsi di feedback. Gli impulsi di feedback e gli impulsi ricevuti dal servoazionamento formano un controllo ad anello chiuso, in modo che il servoazionamento possa controllare la rotazione del motore in modo molto preciso per ottenere un posizionamento preciso.
Controllo del servomotore: generalmente, i servomotori per uso industriale sono controllati da tre anelli, vale a dire anello di corrente, anello di velocità e anello di posizione, che possono feedback rispettivamente l'accelerazione angolare, la velocità angolare e la posizione di rotazione del funzionamento del motore.
Il chip controlla la corrente di azionamento di ciascuna fase del motore attraverso il feedback delle tre, in modo che la velocità e la posizione del motore possano funzionare con precisione come previsto.
Il servo CA ha la caratteristica di coppia costante alla velocità nominale, inerzia comune bassa e media da 200 W, 400 W. La velocità nominale del servo CA è 3000 giri/min, la velocità massima è 5000 giri/min, alta velocità.
La coppia è proporzionale alla corrente, quindi può funzionare in modalità coppia, come viti di bloccaggio, terminali a pressione e altre occasioni che richiedono una coppia costante.
Il rumore e le vibrazioni del servo AC sono molto piccoli, con bassa generazione di calore.
Lo stesso volume di inerzia del motore, l'inerzia del rotore è piccola, l'inerzia del servo da 400 W equivale solo all'inerzia del rotore del motore passo-passo da 57 base 2NM.
Il servo ha una capacità di sovraccarico di breve durata, la selezione deve considerare il moltiplicatore di sovraccarico del motore durante l'accelerazione e la decelerazione.
Il servo utilizza il controllo ad anello chiuso e presenta lo stesso errore di inseguimento della posizione di uno stepper ad anello chiuso.
Il servo richiede la messa in servizio prima dell'uso.
La coppia originale dello stepper e del servomotore non è sufficiente, spesso è necessario lavorare con il riduttore, è possibile utilizzare il set di riduttori o il riduttore planetario.
6. Servomotore - servo
Servo è una classe di servomotori CC, utilizzata inizialmente per piccoli modelli di aeroplani e ora utilizzata per piccoli giunti di robot.
Dall'analisi strutturale, un servo è costituito da un piccolo motore CC, oltre a sensori, chip di controllo e gruppi di riduttori, montati in un alloggiamento integrato.
È in grado di controllare l'angolo di rotazione attraverso un segnale di ingresso (solitamente un segnale PWM, ma anche un segnale digitale).
Poiché si tratta di una versione semplificata, il controllo originale a tre loop del servomotore è semplificato in un loop, ovvero viene rilevato solo il loop di posizione.
Una soluzione economica è un potenziometro, che viene rilevato da un resistore, mentre una soluzione avanzata utilizzerà un sensore Hall o un encoder.
I servi generali sono economici e compatti, ma hanno una precisione molto bassa e una scarsa capacità di calmare la posizione e possono soddisfare molte esigenze di fascia bassa.
Con il boom dei piccoli robot di fascia consumer negli ultimi due anni, i servo piccoli e leggeri sono diventati immediatamente i componenti articolari più adatti.
Tuttavia, i giunti dei robot richiedono prestazioni molto più elevate rispetto ai servi aerei e, come prodotto commerciale, richiedono anche servi di qualità molto più elevata rispetto ai lettori fai-da-te.
Benvenuti a condividere con noi ulteriori informazioni sui motori elettrici nell'area commenti!
Per qualsiasi domanda sul motore elettrico, contattare il motore elettrico professionale produttore In Cina come segue:

Dongchun Motor offre una vasta gamma di motori elettrici utilizzati in vari settori come trasporti, infrastrutture e costruzioni.
Ottieni una risposta tempestiva.






