 Lewati ke konten
Lewati ke konten 
Kita semua tahu bahwa konverter frekuensi merupakan teknologi yang harus dikuasai dalam pekerjaan kelistrikan, dan penggunaan konverter frekuensi untuk mengendalikan motor adalah metode yang umum dalam pengendalian kelistrikan; beberapa juga membutuhkan kemahiran.
Hari ini, kami akan merangkum dan mengorganisasikan pengetahuan yang relevan dengan pengetahuan kami yang terbatas. Kontennya mungkin berulang-ulang, namun tujuannya adalah untuk berbagi dengan semua orang tentang hubungan indah antara konverter frekuensi dan motor.
Pertama-tama, mengapa menggunakan konverter frekuensi untuk mengendalikan motor?
Mari kita pahami dulu secara singkat kedua perangkat ini.
Motor merupakan beban induktif yang menghambat perubahan arus. Selama startup, ini akan menghasilkan perubahan arus yang besar.
Konverter frekuensi adalah perangkat yang menggunakan aksi hidup-mati perangkat semikonduktor daya untuk mengubah frekuensi catu daya menjadi frekuensi energi listrik lain untuk tujuan kontrol. Ini terutama terdiri dari dua bagian: sirkuit utama (modul penyearah, kapasitor elektrolitik dan modul inverter) dan sirkuit kontrol (papan catu daya switching dan papan sirkuit kontrol).

Untuk mengurangi arus start pada motor listrik, terutama untuk motor dengan daya yang lebih tinggi, seiring bertambahnya daya maka arus start juga meningkat. Arus start yang berlebihan dapat membawa beban yang lebih besar pada jaringan distribusi tenaga listrik. Namun, konverter frekuensi dapat mengatasi masalah ini dengan memungkinkan start-up yang mulus tanpa menimbulkan arus start yang berlebihan.
Fungsi lain penggunaan konverter frekuensi adalah pengaturan kecepatan motor. Dalam banyak kasus, pengendalian kecepatan motor diperlukan untuk mencapai efisiensi produksi yang lebih baik. Konverter frekuensi selalu dikenal karena kemampuannya mengatur kecepatan dengan mengubah frekuensi sumber.

Apa saja metode kontrol konverter frekuensi?
Lima cara yang paling umum digunakan untuk mengendalikan motor dengan konverter frekuensi adalah sebagai berikut:
Tegangan keluaran konverter frekuensi tujuan umum tegangan rendah adalah 380-650V, daya keluaran 0,75-400kW, frekuensi operasi 0-400Hz, dan sirkuit utamanya mengadopsi sirkuit AC-DC-AC. Metode pengendaliannya telah melalui empat generasi.
Metode kontrol modulasi lebar pulsa sinusoidal (SPWM) dengan U/f=C
Karakteristiknya adalah struktur sirkuit kontrol sederhana, biaya rendah, kekerasan mekanik yang baik, dan dapat memenuhi persyaratan pengaturan kecepatan transmisi umum yang mulus. Telah banyak digunakan di berbagai industri.
Namun, pada frekuensi rendah, karena tegangan keluaran yang lebih rendah dan pengaruh torsi yang signifikan terhadap penurunan resistansi stator, torsi keluaran maksimum menurun.
Selain itu, karakteristik mekanisnya tidak sekeras motor DC.
Kemampuan torsi dinamis dan performa pengaturan kecepatan statis belum memuaskan. Kinerja sistem juga tidak tinggi; kurva kendali akan berubah seiring dengan perubahan beban; respons torsi lambat; tingkat pemanfaatan torsi motor tidak tinggi; kinerja menurun pada kecepatan rendah karena resistensi stator dan efek zona mati inverter ada sementara stabilitas memburuk dll. Oleh karena itu orang telah meneliti regulasi kecepatan frekuensi variabel yang dikendalikan vektor.

Metode Kontrol Modulasi Lebar Pulsa Vektor Ruang (SVPWM).
Hal ini didasarkan pada efek pembangkitan keseluruhan bentuk gelombang tiga fase, dengan tujuan untuk memperkirakan lintasan medan magnet berputar melingkar yang ideal dari celah udara motor. Ini menghasilkan bentuk gelombang modulasi tiga fase dan mengontrolnya dengan memperkirakan lingkaran menggunakan poligon tertulis.
Setelah penggunaan praktis, perbaikan dilakukan dengan memperkenalkan kompensasi frekuensi untuk menghilangkan kesalahan kontrol kecepatan; memperkirakan amplitudo fluks melalui umpan balik untuk menghilangkan pengaruh resistansi stator pada kecepatan rendah; dan loop penutup untuk tegangan dan arus keluaran untuk meningkatkan akurasi dan stabilitas dinamis.
Namun, terdapat banyak tautan sirkuit kontrol, penyesuaian torsi belum diterapkan, sehingga kinerja sistem belum meningkat secara mendasar.

Metode Pengendalian Vektor (VC).
Metode pengaturan kecepatan frekuensi variabel dalam pengendalian vektor adalah dengan mengubah arus stator Ia, Ib, Ic motor asinkron menjadi arus AC dua fasa Ia1Ib1 dalam sistem koordinat stasioner melalui transformasi tiga fasa menjadi dua fasa. Kemudian diubah menjadi arus DC Im1 dan It1 di bawah sistem koordinat putar sinkron melalui transformasi rotasi orientasi medan rotor (di mana Im1 berhubungan dengan arus eksitasi pada motor DC; It1 berhubungan dengan arus jangkar sebanding dengan torsi). Besaran kendali untuk motor DC diperoleh dengan meniru metode kendalinya. Setelah transformasi invers koordinat yang sesuai dilakukan, kontrol motor asinkron dapat dicapai.

Intinya, motor AC setara dengan motor DC dan kontrol independen diterapkan secara terpisah untuk komponen kecepatan dan medan magnet. Dengan mengendalikan fluks rotor terlebih dahulu kemudian menguraikan arus stator menjadi komponen torsi dan medan magnet diikuti dengan kontrol ortogonal atau terpisah melalui transformasi koordinat. Usulan metode pengendalian vektor adalah revolusioner tetapi sulit dalam praktiknya karena kesulitan mengamati fluks rotor secara akurat yang sangat mempengaruhi karakteristik sistem serta transformasi rotasi vektor kompleks yang digunakan selama kontrol motor DC setara membuat hasil aktual sulit mencapai hasil analitis yang ideal.
Metode spesifiknya adalah:
Kontrol fluks magnet stator dengan memperkenalkan pengamat fluks magnet stator untuk mencapai kontrol tanpa sensor;
Identifikasi otomatis (ID) mengandalkan model matematika motor yang akurat untuk mengidentifikasi parameter motor secara otomatis;
Hitung torsi aktual, fluks magnet stator, dan kecepatan rotor secara real-time berdasarkan nilai aktual yang sesuai dengan impedansi stator, induktansi timbal balik, faktor saturasi magnetik, inersia, dll.;
Wujudkan kontrol Band-Band dengan menghasilkan sinyal PWM sesuai dengan fluks magnet dan torsi untuk mengontrol status peralihan inverter.

Konverter frekuensi AC tipe matriks mempunyai respons torsi yang cepat (<2ms), akurasi kecepatan tinggi (± 2%, tidak ada umpan balik PG), akurasi torsi tinggi (<+3%); pada saat yang sama, ia juga memiliki torsi awal yang lebih tinggi dan akurasi torsi yang tinggi, terutama pada kecepatan rendah (termasuk kecepatan 0), ia dapat menghasilkan 150%~200% dari torsi terukur.
Bagaimana konverter frekuensi mengontrol motor? Bagaimana mereka terhubung bersama?
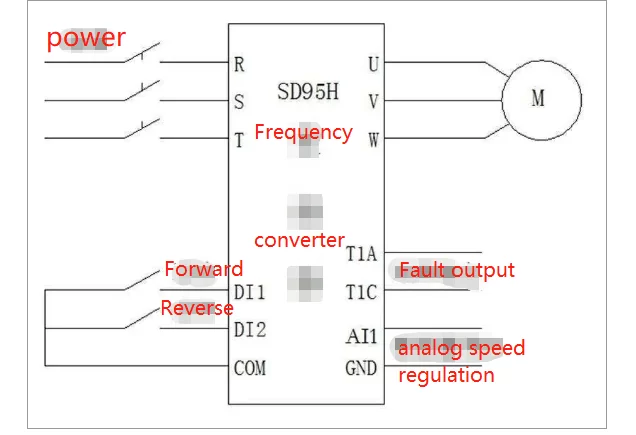
Pengkabelan konverter frekuensi untuk mengontrol motor relatif sederhana, mirip dengan pengkabelan kontaktor. Tiga kabel catu daya utama dihubungkan dan kemudian dikeluarkan ke motor. Namun, terdapat cara berbeda untuk mengendalikan konverter frekuensi.
Pertama, mari kita lihat sambungan terminal konverter frekuensi. Meskipun terdapat banyak merek dan metode pengkabelan yang berbeda untuk konverter frekuensi, sebagian besar memiliki sambungan terminal yang serupa. Mereka umumnya mencakup input sakelar untuk putaran maju dan mundur yang digunakan untuk mengontrol start dan mundur motor; terminal umpan balik yang digunakan untuk memberikan umpan balik pada status pengoperasian seperti frekuensi berjalan, kecepatan, status kesalahan, dll.; kontrol pengaturan kecepatan yang dapat disesuaikan menggunakan potensiometer atau tombol tergantung pada jenis konverter yang berbeda.
Kontrol dapat dicapai melalui kabel fisik atau jaringan komunikasi. Banyak penggerak frekuensi variabel sekarang mendukung kontrol komunikasi, memungkinkan start/stop motor, putaran maju/mundur, penyesuaian kecepatan dan informasi umpan balik dikirim melalui jalur komunikasi.
Ketika kecepatan putaran (frekuensi) motor berubah, apa yang terjadi dengan torsi keluarannya?
Torsi awal dan torsi maksimum ketika digerakkan oleh konverter frekuensi harus lebih kecil dibandingkan ketika digerakkan langsung oleh daya listrik.
Ketika motor ditenagai oleh listrik, terdapat dampak start dan akselerasi yang besar. Namun, ketika ditenagai oleh konverter frekuensi, dampaknya lebih lemah. Start langsung pada frekuensi listrik akan menghasilkan arus start yang besar. Bila menggunakan konverter frekuensi, tegangan keluaran dan frekuensi konverter ditambahkan secara bertahap ke motor, sehingga arus awal dan dampaknya pada motor lebih kecil.

Biasanya seiring dengan menurunnya frekuensi (kecepatan menurun), torsi yang dihasilkan motor juga menurun. Data aktual penurunan ini dapat ditemukan di beberapa manual konverter frekuensi.
Dengan menggunakan metode pengendalian vektor dengan inverter kontrol fluks magnet, dapat memperbaiki torsi motor pada kecepatan rendah yang tidak mencukupi sehingga torsi yang cukup dapat dihasilkan bahkan pada kecepatan rendah.
Saat menyesuaikan ke frekuensi lebih besar dari 50Hz dengan penggerak frekuensi variabel (VFD), torsi keluaran motor akan berkurang.
Motor konvensional dirancang dan diproduksi sesuai dengan standar tegangan 50Hz; torsi pengenalnya juga diberikan dalam rentang tegangan ini. Oleh karena itu, pengaturan kecepatan di bawah frekuensi pengenal disebut pengaturan kecepatan torsi konstan (T=Te,P<=Pe).
Ketika frekuensi keluaran VFD melebihi 50Hz, hubungan linier antara torsi yang dihasilkan dari motor berkurang secara proporsional dengan meningkatnya frekuensi.
Saat berjalan pada kecepatan di atas 50Hz, pertimbangan harus diberikan untuk mencegah terjadinya torsi keluaran yang tidak mencukupi karena ukuran beban pada motor listrik.
Misalnya, torsi yang dihasilkan motor listrik yang beroperasi pada 100 Hz akan berkurang sekitar setengahnya dibandingkan torsi yang dihasilkan saat beroperasi pada 50 Hz.
Oleh karena itu, pengaturan kecepatan di atas frekuensi terukur disebut pengaturan kecepatan daya konstan (P=Ue*Ie).
Penerapan konverter frekuensi di atas 50Hz
Seperti yang kita ketahui, untuk motor tertentu, tegangan dan arus pengenalnya adalah konstan.
Jika nilai pengenal konverter frekuensi dan motor adalah 15kW/380V/30A, motor dapat beroperasi pada frekuensi di atas 50Hz.
Ketika kecepatannya 50Hz, tegangan keluaran konverter frekuensi adalah 380V dan arus 30A. Jika kita meningkatkan frekuensi keluaran ke 60Hz, maka tegangan dan arus keluaran maksimum konverter frekuensi akan tetap hanya 380V/30A. Tentu saja, karena daya keluaran tetap tidak berubah, hal ini disebut pengaturan kecepatan daya konstan.

Bagaimana dengan torsi dalam kasus ini?
Karena P=wT (P: daya; w: kecepatan sudut; T: torsi), jika P tetap konstan tetapi w bertambah, maka T akan berkurang.
Kita juga bisa melihatnya dari sudut pandang lain:
Tegangan stator U=E+I*R (I: arus; R: hambatan listrik; E: gaya gerak listrik induksi) motor,
Terlihat bahwa jika U dan I tidak berubah, maka E juga tetap tidak berubah.
Dan E=kFX (k: konstan; f: frekuensi; X: fluks magnet). Oleh karena itu ketika f berubah dari 50-->60Hz, X juga menurun.
Untuk motor, T=KSAYAX(K:konstan;I:arus;X:fluks magnet). Oleh karena itu, jika fluks magnet X berkurang, T juga akan berkurang.

At less than or equal to 50 Hz,I*R is small so when U/f=E/f does not change,magnetic flux(X)is constant.Torque(T)and electric current(I)are proportional.This explains why overload(torque)capacity of a variable-frequency drive(VFD)is usually described by its overcurrent capacity,and referred to as "constant-torque"speed regulation(rated current remains unchanged-->torsi maksimum tetap tidak berubah).
Kesimpulan: Ketika frekuensi keluaran konverter frekuensi meningkat dari atas 50Hz, torsi keluaran motor akan berkurang.
Faktor lain yang berhubungan dengan torsi keluaran
Kapasitas pemanasan dan pendinginan menentukan kemampuan arus keluaran inverter, sehingga mempengaruhi kemampuan torsi keluaran inverter.
Frekuensi pembawa: Arus pengenal yang ditunjukkan oleh inverter umum didasarkan pada nilai yang dapat dihasilkan secara terus menerus pada frekuensi pembawa tertinggi dan suhu lingkungan tertinggi. Mengurangi frekuensi pembawa tidak akan mempengaruhi arus motor. Namun pemanasan komponen akan berkurang.
Suhu sekitar: Sama seperti meningkatkan nilai arus proteksi inverter ketika mendeteksi suhu sekitar yang rendah tidak diperlukan.
Ketinggian: Peningkatan ketinggian mempengaruhi pembuangan panas dan kinerja insulasi. Umumnya, hal ini dapat diabaikan di bawah 1000m, dan pengurangan kapasitansi sebesar 5% per 1000 meter di atas level ini sudah cukup.

Bagaimana cara mengatur frekuensi motor yang dikendalikan oleh penggerak frekuensi variabel?
Dalam ringkasan di atas, kita telah mempelajari mengapa perlu menggunakan penggerak frekuensi variabel untuk mengendalikan motor dan cara kerjanya. Pengendalian motor dengan penggerak frekuensi variabel dapat diringkas dalam dua hal: pertama, pengendalian tegangan start dan frekuensi motor dengan penggerak frekuensi variabel untuk mencapai start dan stop yang mulus; kedua, mengatur kecepatan motor dengan mengubah frekuensinya melalui penggunaan penggerak frekuensi variabel.
Ada pertanyaan praktis yang dilontarkan oleh netizen: berapa frekuensi terendah yang dapat diatur saat mengendalikan motor biasa dengan penggerak frekuensi variabel? Saat ini sudah disesuaikan menjadi 60Hz dan pimpinan meminta saya untuk terus meningkatkan angka Hz. Rencananya akan disesuaikan ke 100Hz. Adakah yang pernah menyesuaikannya ke 100Hz? (Dalam situasi serupa, faktor apa saja yang perlu dipertimbangkan?)

Mari kita lihat bagaimana tanggapan netizen:
Netizen lpl53: Kami telah mencapai 200HZ pada mesin cuci industri, tetapi arusnya tidak tinggi.
Netizen26584: Motor mesin gerinda umumnya antara 100-110…
Netizen 82252031: Jika daya cukup dan tidak ada arus berlebih pada motor, maka motor bisa berfungsi. Namun, perhatian harus diberikan pada pengukuran suhu bantalan motor, kebisingan dan getaran yang tidak normal. Satu motor yang digerakkan oleh frekuensi variabel beroperasi pada 70-80Hz untuk waktu yang lama; motor enam kutub mudah untuk dicoba sedangkan motor dua kutub memerlukan kehati-hatian.
Netizen fsjnzhouyan: Ini tergantung pada kualitas lembaran baja silikon yang digunakan pada motor. Dalam kasus penggunaan sebelumnya, biasanya tidak ada masalah hingga sekitar 85Hz; namun banyak motor tidak dapat mencapai kecepatan pengenalnya setelah disetel hingga sekitar 90Hz karena saturasi magnetik.
Netizen ZCMY: Sebaiknya ganti bearing motor dengan yang berkecepatan tinggi. Uji juga getarannya dan pastikan cocok untuk beban seperti kipas angin atau pompa air.
Netizen mengx9806: Saya pernah menyesuaikannya hingga 1210HZ menggunakan penggerak frekuensi variabel seri A1000 mesin listrik Dongyuan yang berjalan tanpa masalah apa pun selama dua tahun berturut-turut tanpa terjadi masalah besar meskipun masalah kecil mungkin muncul jika terjadi kesalahan.
Netizen 68957:Saya sudah mencoba menyesuaikannya hingga 180, tetapi hanya berjalan sebentar.
Netizen 1531214350: Saya pernah memperbaiki mesin cuci sebelumnya dan motornya biasa saja. Itu berjalan pada 150HZ selama pengeringan putaran.
Ya de Ya: Jika frekuensi motor biasa lebih tinggi dari frekuensi pengenalnya sebesar 20%, maka perbedaan kecepatan akan meningkat; ketika frekuensi meningkat, perbedaan kecepatan juga meningkat.

Netizen kdrjl: Tampaknya pemahaman tentang struktur dasar dan kegunaan motor induksi AC masih terlalu sedikit. Batas kecepatan tertinggi untuk mengatur motor induksi tidak terletak pada penggerak frekuensi variabel. Secara umum, penggerak frekuensi variabel reguler beroperasi pada frekuensi tidak lebih rendah dari 400Hz dalam mode V/F (misalnya penggerak frekuensi variabel Siemens beroperasi pada 600Hz). Untuk pengendalian vektor, batas frekuensi pengoperasian maksimum adalah 200-300Hz sedangkan kontrol servo memiliki batas yang lebih tinggi lagi. Oleh karena itu, jika Anda ingin mengatur kecepatan motor induksi hingga 100Hz menggunakan penggerak frekuensi variabel, tidak ada kendala teknis atau keraguan mengenai hal tersebut.
Struktur mekanis rotor motor induksi - seperti struktur sangkarnya - menentukan kekuatan mekaniknya yang berkaitan dengan kecepatan putaran maksimum desainnya; semakin cepat putarannya maka gaya sentrifugalnya semakin besar. Oleh karena itu, umumnya memenuhi spesifikasi desain berdasarkan kecepatan rotasi maksimumnya, dan kekuatan mekaniknya tidak bisa terlalu besar. Bantalan rotor juga memiliki batas putaran maksimum. Jadi ketika melebihi nilai tersebut, Anda perlu memahami batasan tersebut dan menggantinya dengan bantalan kecepatan tinggi jika perlu.
Terakhir, debugging keseimbangan dinamis dan pengaturan rotor tidak boleh melebihi parameter yang ditentukan pabrikan.
Singkatnya, ketika mengatur kecepatan motor induksi melalui aplikasi penggerak frekuensi variabel melebihi 100 Hz, penting untuk terlebih dahulu berkonsultasi dengan produsen apakah hal ini dapat dilakukan atau meminta motor yang disesuaikan, untuk memastikan keandalan dalam kondisi kecepatan tinggi. Jika Anda memutuskan untuk tidak melalui pabrikan, Anda harus terlebih dahulu menentukan uji keseimbangan dinamis rotor dan kemudian mengkonfirmasi kecepatan putaran maksimum bantalan.

Jika melebihi nilai ini, Anda perlu menggantinya dengan bantalan berkecepatan tinggi yang dapat memenuhi persyaratan di lokasi. Anda juga perlu mempertimbangkan masalah pembuangan panas.
Terakhir, berdasarkan pengalaman, motor induksi dengan daya di bawah 100kW seharusnya relatif cocok untuk beroperasi pada frekuensi dalam 100Hz; namun, yang melebihi 100kW sebaiknya disesuaikan daripada memilih produk konvensional untuk keperluan umum.
Netizen lvpretend: Ini terutama tergantung pada motor itu sendiri. Jika awalnya motor dua kutub dengan tenaga tinggi, harus berhati-hati. Mesin cuci industri adalah contoh operasi kecepatan berlebih yang sering terjadi tetapi kecepatan tetapannya umumnya rendah - kebanyakan motor enam kutub. Saya telah melihat motor empat kutub mencapai hingga 120Hz.
Informasi lebih lanjut, silakan kontak dengan produsen motor listrik profesional - Dongchun motor Cina langsung






