 דלג לתוכן
דלג לתוכן 
מנוע חשמלי הוא מכשיר הממיר אנרגיה חשמלית לאנרגיה מכנית באמצעות פעולה אלקטרומגנטית.
לפי צורת האנרגיה החשמלית, ניתן לחלק מנועים לשתי קטגוריות: מנועי AC ומנועי DC.
ביניהם, ניתן לחלק מנועי AC למנועי AC חד פאזיים ומנועי AC תלת פאזיים. על פי ההבדל בקצב הסיבוב, על פי עקרון הסיווג שלו, ניתן לחלק את המנוע גם למנועים סינכרוניים ולמנועים אסינכרוניים.
ניתן לחלק מנועים סינכרוניים למנועים סינכרוניים מגנט קבוע, מנועים סינכרוניים היסטריים ומנועים סינכרוניים סריגה לפי השדות המגנטיים השונים.
מנועים אסינכרוניים, לעומת זאת, זמינים לא רק בצורת אינדוקציה, אלא גם בצורת קומוטטור AC.
ניתן לחלק את צורת האינדוקציה למנועים אסינכרוניים תלת פאזיים ולמנועים אסינכרוניים עם קוטב מוצל. בנוסף, בהתאם לסוג המיגון ניתן לחלק את המנוע גם למנועים סגורים, פתוחים, עמידים למים, צוללים, אטומים למים ומוגני פיצוץ.
מנוע חשמלי הוא חלק חשוב ממערכת ההולכה והבקרה, שהיא מכשיר אלקטרומגנטי למימוש המרה או שידור של אנרגיה חשמלית על פי חוק האינדוקציה האלקטרומגנטית, התפקיד העיקרי הוא לייצר מומנט הנעה, כמקור הכוח של חשמל מכשירי חשמל או מכונות שונות, ולהמיר אנרגיה חשמלית לאנרגיה מכנית.
עם התפתחות המדע והטכנולוגיה המודרניים, מוקד המנועים ביישומים מעשיים החל לעבור מהעברת העברה פשוטה בעבר לבקרה מורכבת, במיוחד לשליטה מדויקת של מהירות המנוע, המיקום והמומנט.
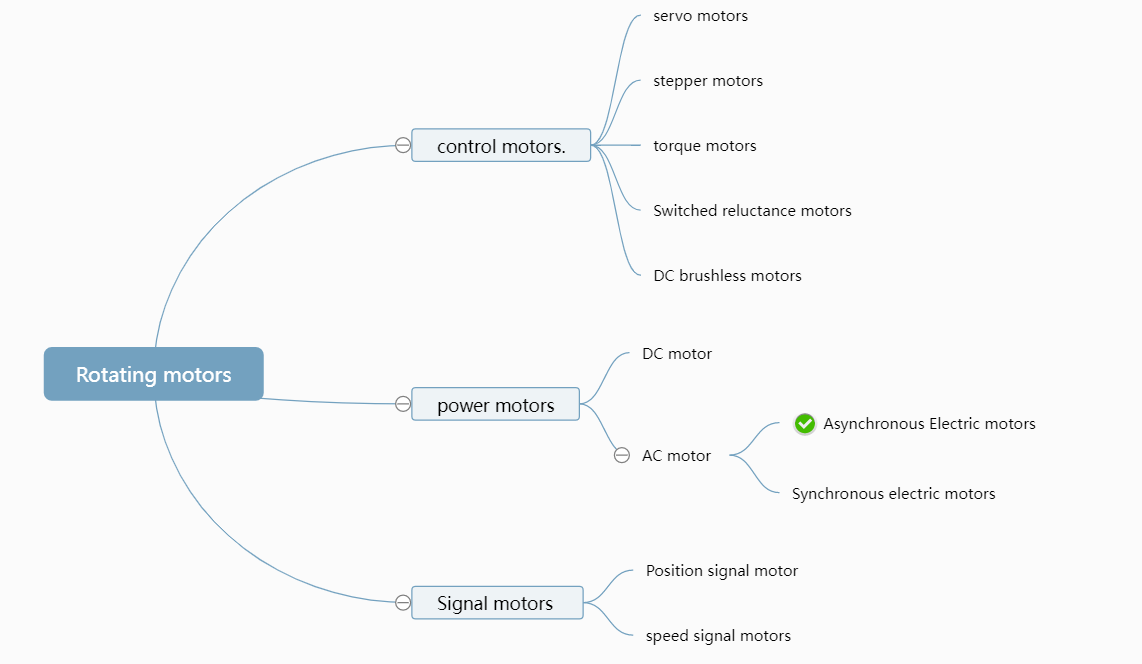
עם זאת, למנועים יהיו עיצובים ושיטות הנעה שונות בהתאם ליישומים שונים. על פי השימושים במנועים מסתובבים, נעשה הסיווג הבסיסי הבא, ובעיקר מציגים את המנועים המייצגים, הנפוצים והבסיסיים ביותר במנועים - מנועי בקרה, מנועי כוח ומנועי איתות.
שליטה במנועים
Control motors are mainly used for precise speed and position control, and as "actuators" in control systems. They can be divided into servo motors, stepper motors, torque motors, switched reluctance motors, brushless DC motors and other categories.
מנועי סרוו
מנוע הסרוו המוקדם ביותר הוא מנוע DC כללי, ורק כאשר דיוק הבקרה אינו גבוה, מנוע ה-DC הכללי משמש כמנוע סרוו. מנוע הסרוו DC הנוכחי הוא מנוע DC קטן במונחים של מבנה, והעירור שלו מאמץ בעיקר בקרת אבזור ובקרת שדה מגנטי, אך בדרך כלל מאמץ בקרת אבזור.
מנועי סרוו נמצאים בשימוש נרחב במערכות בקרה שונות, בעיקר במערכות בקרת תנועה שונות, בעיקר במערכות follow me. זה יכול להמיר את אות מתח הכניסה לפלט המכאני על ציר המנוע ולגרור את האלמנט המבוקר כדי להשיג את מטרת הבקרה. באופן כללי, מנוע סרוו דורש שמהירות המנוע תהיה נשלטת על ידי אות המתח הנוסף, המהירות יכולה להשתנות באופן רציף עם השינוי של אות המתח הנוסף, ניתן לשלוט במומנט על ידי פלט הזרם מהבקר, והמנוע צריך לשקף מהר, להיות קטן בגודלו ובעל כוח שליטה קטן.

מנוע צעדים
מה שנקרא מנוע צעד הוא מפעיל הממיר פולסים חשמליים לתזוזה זוויתית. כלומר, כאשר נהג הצעד מקבל אות דופק, הוא מניע את מנוע הצעד כדי לסובב זווית קבועה בכיוון שנקבע.
אנו יכולים לשלוט בתזוזה הזוויתית של המנוע על ידי שליטה במספר הפולסים, כדי להשיג את המטרה של מיקום מדויק.
במקביל, אנו יכולים גם לשלוט במהירות ובהאצה של סיבוב המנוע על ידי שליטה בתדר הדופק, כדי להשיג את מטרת ויסות המהירות. כיום, מנועי הצעד הנפוצים יותר כוללים מנועי צעד תגובתיים (VR), מנועי צעד מגנט קבוע (PM), מנועי צעד היברידיים (HB) ומנועי צעד חד פאזיים.
ההבדל בין מנועי צעד למנועים רגילים טמון בעיקר בצורתם מונעת הדופק, כך שניתן לשלב מנועי צעד עם טכנולוגיית בקרה דיגיטלית מודרנית ובעלי מאפיינים של מבנה פשוט, אמינות גבוהה ועלות נמוכה.
אבל מנועי צעד ברמת דיוק הבקרה, טווח שינוי המהירות, ביצועים במהירות נמוכה נחותים מהבקרה המסורתית בלולאה סגורה של מנועי סרוו DC, כך שמנועי צעד נמצאים בשימוש נרחב בפרקטיקות ייצור ודרישות דיוק אחרות אינן גבוהות במיוחד בתחומים שונים , במיוחד בתחום ייצור מכונת CNC.
ומנועי צעד אינם זקוקים להמרת A/D, יכולים להמיר ישירות את אות הדופק הדיגיטלי לתזוזה זוויתית, כך שהוא נחשב למפעילי מכונת CNC האידיאליים ביותר.
בנוסף ליישום שלהם במכונות CNC, ניתן להשתמש במנועי צעד גם במכונות אחרות, כגון מנועים במזינים אוטומטיים, מנועים בכונני תקליטונים לשימוש כללי, וגם במדפסות ובפלוטרים.

בנוסף, למנוע הצעדים יש גם פגמים רבים. בגלל תדירות ההתחלה ללא עומס של מנוע הצעד, כך שמנוע הצעד יכול לפעול כרגיל במהירות נמוכה, אך אם גבוה ממהירות מסוימת לא יכול להתחיל, ומלווה בצליל שריקה חד. יצרנים שונים של דיוק כונני המשנה עשויים להשתנות במידה רבה, ככל שקשה יותר לשלוט על דיוק החלוקה. בנוסף, לסיבוב מנוע צעד במהירות נמוכה יש רטט ורעש גדולים.
מנוע מומנט
מה שנקרא מנוע המומנט הוא מנוע DC מגנט קבוע רב קוטבי מסוג שטוח.
לאבזור שלו יש מספר גדול יותר של חריצים, לוחות התייחסות ומוליכים סדרתיים כדי להפחית את פעימת המומנט ואת פעימת המהירות. ישנם שני סוגים של מנועי מומנט, מנועי מומנט DC ומנועי מומנט AC.

ביניהם, למנוע DC יש תגובת עצמית קטנה, כך שהתגובה טובה. מומנט המוצא שלו פרופורציונלי לזרם הכניסה, ללא תלות במהירות ובמיקום הרוטור. הוא יכול לפעול במהירות נמוכה בחיבור ישיר לעומס ללא הפחתת הילוכים במצב כמעט חסום, כך שהוא יכול לייצר יחס מומנט לאינרציה גבוה על ציר העומס ולבטל את השגיאה השיטתית עקב השימוש בהילוכים הפחתים.
ניתן לחלק מנועי מומנט AC לסינכרוני ולא-סינכרוני, והזרם הנפוץ הוא מנוע המומנט הא-סינכרוני של כלוב הסנאי, בעל המאפיינים של מהירות נמוכה ומומנט גדול. בדרך כלל, מנועי מומנט AC משמשים לעתים קרובות בתעשיית הטקסטיל. עקרון העבודה והמבנה שלהם זהים לאלה של מנועים אסינכרוניים חד-פאזיים, אך המאפיינים המכניים שלהם רכים יותר בגלל ההתנגדות הגבוהה יותר של רוטור כלוב הסנאי.
החלפת מנוע סרבנות
מנוע חוסר רצון מתג הוא סוג חדש של מנוע בקרת מהירות, מבנה פשוט וחזק במיוחד, עלות נמוכה, ביצועי בקרת מהירות מצוינים, הוא מתחרה חזק של מנוע בקרה מסורתי, בעל פוטנציאל שוק חזק.
עם זאת, ישנן גם בעיות כמו פעימת מומנט, רעש הפעלה ורטט, שצריכים קצת זמן כדי לייעל ולהשתפר כדי להסתגל ליישום השוק בפועל.
מנוע DC ללא מברשות
Brushless DC motor (BLDCM) is developed on the basis of brushed DC motor, but its drive current is uncompromisingly AC. Brushless DC motors can be further divided into brushless rate motors and brushless torque motors. Generally, brushless motors have two types of drive currents, one is a trapezoidal wave (usually a "square wave") and the other is a sine wave. Sometimes the former is called a brushless DC motor and the latter is called an AC servo motor, which is also a kind of AC servo motor to be exact.
Brushless DC motors usually have a "slender" structure in order to reduce rotational inertia. Brushless DC motors are much smaller in weight and volume than brushed DC motors, and the corresponding rotational inertia can be reduced by about 40%-50%. Due to the processing problems of permanent magnet materials, the capacity of brushless DC motors is generally below 100kW.
למאפיינים המכניים ולמאפייני הוויסות של מנוע זה יש ליניאריות טובה, טווח מהירויות רחב, חיים ארוכים, תחזוקה קלה ורעש נמוך, ואין סדרה של בעיות הנגרמות על ידי מברשות, כך שלמנוע זה יש פוטנציאל רב ליישום במערכות בקרה.
Brushless DC motors are usually of "slender" construction to reduce the inertia.
מנועי DC ללא מברשות קטנים בהרבה במשקל ובנפח ממנועי DC מוברש, וניתן להפחית את האינרציה הסיבובית המקבילה בכ-40%-50%. בשל בעיות העיבוד של חומרים מגנטים קבועים, הקיבולת של מנועי DC ללא מברשות היא בדרך כלל מתחת ל-100kW.
למאפיינים המכניים ולמאפייני הוויסות של מנוע זה יש ליניאריות טובה, טווח מהירויות רחב, חיים ארוכים, תחזוקה קלה ורעש נמוך, ואין סדרה של בעיות הנגרמות על ידי מברשות, כך שלמנוע זה יש פוטנציאל רב ליישום במערכות בקרה.
מנוע כוח
מנוע הכוח מחולק למנוע DC ולמנוע AC, ומנוע AC מחולק בעיקר למנוע סינכרוני ולמנוע אסינכרוני.
מנוע DC
מנוע DC הוא המנוע הקדום ביותר, בערך בסוף המאה ה-19, אותו ניתן לחלק באופן גס לשתי קטגוריות עם commutator וללא commutator.
למנוע DC יש מאפייני שליטה טובים יותר, אם כי במבנה, המחיר והתחזוקה אינם טובים כמו מנוע AC.
אבל בגלל בעיית בקרת המהירות של מנוע AC לא נפתרה היטב, ולמנוע DC יש את היתרונות של ביצועי בקרת מהירות טובים, קל להפעלה, מסוגל לטעון התנעה,
כך שהיישום של מנוע DC עדיין רחב מאוד, במיוחד לאחר הופעתו של אספקת כוח DC מבוקר סיליקון.
סטטוס יישום: בחיים, ישנם אינספור יישומים של מוצרים חשמליים, כגון מאווררים, סכיני גילוח, דלתות אוטומטיות בבתי מלון, מנעולי דלתות אוטומטיים, וילונות אוטומטיים וכו', כולם משתמשים במנועי DC.
מנועי DC נמצאים בשימוש נרחב גם במתיחה של קטר, כגון מנועי מתיחה DC לקטרי רכבת, מנועי מתיחה DC לקטרי רכבת תחתית, מנועי עזר DC לקטרים, מנועי מתיחה DC לקטרי כרייה, מנועי DC לספינות וכו'.
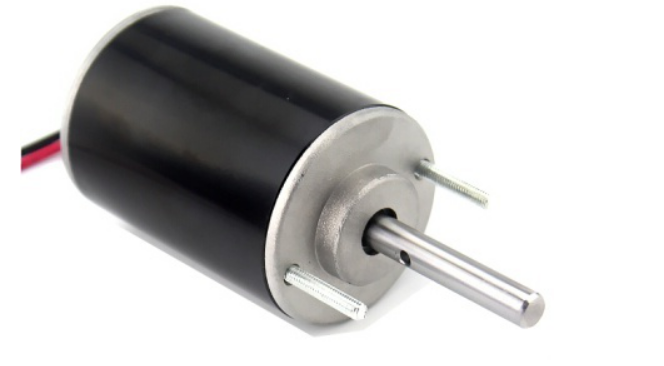
הם נמצאים בשימוש נרחב גם במטוסים, טנקים, מכ"ם וכלי נשק וציוד אחרים. התמונה מציגה את מנוע DC מסדרת Z4.

מנוע AC
מנוע סינכרוני
המנוע הסינכרוני כביכול הוא מנוע חשמלי המונע על ידי זרם חילופין, השדה המגנטי מסתובב הרוטור והסטטור פועלים באופן סינכרוני.
The stator of synchronous motor is exactly the same as that of asynchronous motor, but there are two types of rotor: "convex pole" and "hidden pole".
המנוע הסינכרוני הרוטור הקמור פשוט וקל לייצור, אך החוזק המכני נמוך והוא מתאים לפעולה במהירות נמוכה.
למנוע הסינכרוני המוט הנסתר יש תהליך ייצור מסובך, אך בעל חוזק מכני גבוה ומתאים לפעולה במהירות גבוהה.
The working characteristic of synchronous motor is the same as all motors, which is "reversible", that is, it can run in generator mode and motor mode.
מצב יישום: מנועים סינכרוניים משמשים בעיקר במכונות גדולות, כגון מפוחים, משאבות, טחנות כדורים, מדחסים, מפעלי גלגול פלדה, מכשירים וציוד קטנים ומיניאטוריים, או כאלמנטים בקרה, שמנועים סינכרוניים תלת פאזיים הם הגוף העיקרי שבהם .
בנוסף, זה יכול לשמש גם כמווסת כדי לספק כוח תגובתי אינדוקטיבי או קיבולי לרשת.

מנוע אסינכרוני
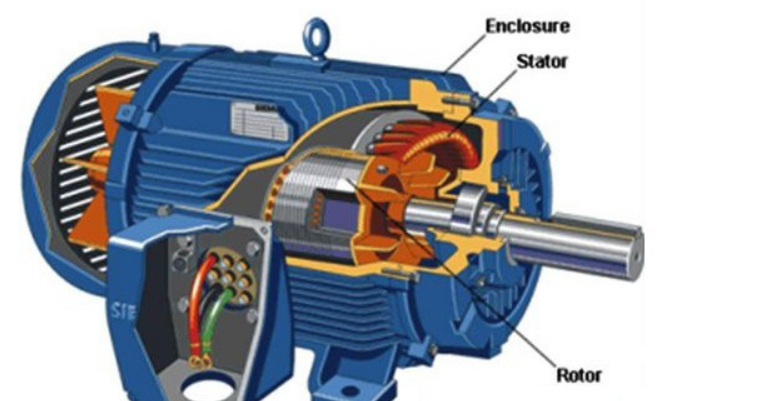
מנוע אסינכרוני הוא סוג של מנוע AC המבוסס על אינטראקציה של שדה מגנטי מסתובב מרווח אוויר וזרם אינדוקציה מתפתל הרוטור כדי לייצר מומנט אלקטרומגנטי ולממש המרת אנרגיה.
מנוע אסינכרוני הוא בדרך כלל סדרה של מוצרים עם מגוון רחב של מפרטים, והוא הנפוץ ביותר והמבוקש ביותר מבין כל המנועים.
כיום, כ-90% מהמכונות בהעברת הכוח משתמשות במנוע AC אסינכרוני, כך שצריכת החשמל שלה מהווה יותר ממחצית מהעומס החשמלי הכולל.
בדוק את הסרטון עבור היצרן של מנוע אסינכרוני
למנוע אסינכרוני יש את היתרונות של מבנה פשוט, ייצור קל, שימוש ותחזוקה, פעולה אמינה כמו גם מסה קטנה יותר ועלות נמוכה יותר.
יתר על כן, למנוע אסינכרוני יש יעילות הפעלה גבוהה ומאפייני עבודה טובים, מטווח ללא עומס לעומס מלא קרוב לפעולה במהירות קבועה, יכול לעמוד בדרישות ההולכה של רוב מכונות הייצור התעשייתיות והחקלאיות.
מנועים אסינכרוניים נמצאים בשימוש נרחב בהנעת מכונות, משאבות, מפוחים, מדחסים, ציוד הרמה וליפוף, מכונות כרייה, מכונות תעשייה קלה, מכונות עיבוד חקלאיות ועיבוד צדדי ומרבית מכונות הייצור התעשייתיות והחקלאיות, כמו גם מכשירי חשמל ביתיים וציוד רפואי.
מצב יישום: המנועים האסינכרוניים הנפוצים יותר הם מנועים אסינכרוניים חד-פאזיים ומנועים אסינכרוניים תלת-פאזיים, מתוכם המנוע האסינכרוני התלת-פאזי הוא הגוף העיקרי של המנוע האסינכרוני, ניתן להשתמש במנוע אסינכרוני תלת-פאזי להנעת מגוון של מכונות למטרות כלליות כגון מדחסים, משאבות, מגרסות, מכונות חיתוך, מכונות הובלה וציוד מכני אחר, בכרייה, מכונות, מתכות, נפט, תעשייה כימית, תחנות כוח ומפעלי תעשייה וכרייה אחרים כמניע העיקרי המנוע. משמש בכרייה, מכונות, מתכות, נפט, תעשייה כימית, תחנת כוח ומפעלי תעשייה וכרייה אחרים.
מנועים אסינכרוניים חד פאזיים משמשים בדרך כלל במקומות שבהם אספקת חשמל תלת פאזית אינה נוחה, בעיקר מנועים מיניאטוריים ובעלי קיבולת קטנה, המשמשים יותר במכשירי חשמל ביתיים, כגון מאווררים חשמליים, מקררים, מזגנים, שואבי אבק וכו'.

מנוע אות
מנוע אות מיקום
נכון לעכשיו, מנועי המיקום המייצגים ביותר מאותתים: רזולובר, סינכרון אינדוקציה ומכונת זווית מתכווננת עצמית.
(1) שנאי רוטרי
שנאי סיבובי הוא חיישן אלקטרומגנטי, הידוע גם בשם מפרק סינכרוני. זהו מנוע AC קטן למדידת זווית, המשמש למדידת תזוזה זוויתית ומהירות זוויתית של האובייקט המסתובב, ומורכב מסטאטור ורוטור. פיתול הסטטור משמש כצד הראשוני של השנאי לקליטת מתח העירור, ותדר העירור הוא בדרך כלל 400, 3000 ו-5000 HZ וכו'. פיתול הרוטור משמש כצד המשני של השנאי לקליטת מתח העירור . פיתול הרוטור משמש כצד המשני של השנאי כדי לקבל את המתח המושרה באמצעות צימוד אלקטרומגנטי.
סטטוס יישום: הרזולובר הוא מכשיר לזיהוי זווית, מיקום ומהירות דיוק, המתאים לכל אירועי פותר שנאים סיבוביים המשתמשים במקודד סיבובי, במיוחד עבור טמפרטורה גבוהה, קור, לחות, מהירות גבוהה, רטט גבוה ואירועים אחרים שבהם מקודד סיבובי אינו יכול לעבוד כמו שצריך. בשל המאפיינים לעיל של השנאי הסיבובי, הוא יכול להחליף לחלוטין את המקודד הפוטואלקטרי ונמצא בשימוש נרחב במערכת זיהוי זווית ומיקום בתחומי מערכת בקרת סרוו, מערכת רובוט, כלים מכניים, רכב, חשמל, מתכות, טקסטיל , דפוס, תעופה וחלל, ספינה, נשק, אלקטרוניקה, מתכות, כרייה, שדה נפט, שימור מים, תעשייה כימית, תעשייה קלה, בנייה וכו'. זה יכול לשמש גם בטרנספורמציה של קואורדינטות, פעולה טריגונומטרית והעברת נתונים בזווית, וכשתיים -מחליף פאזה בהתקן המרה זווית-דיגיטלית.
סינכרון אינדוקציה
סנכרון אינדוקציה מורכב על ידי שימוש בעקרון שההשראות ההדדית של שתי פיתולים מישוריים משתנה בהתאם למיקום, וניתן להשתמש בו כדי למדוד תזוזה ליניארית או זוויתית. ביניהם, מדידת תזוזה ליניארית נקראת סינכרוניזר אינדוקציה ליניארי (או סינכרוניזר אינדוקציה ארוך), והמדידה של תזוזה זוויתית נקראת סינכרוניזטור אינדוקציה צדדי (או סינכרון אינדוקציה סיבובי). לסינכרונים יש את היתרונות של דיוק ורזולוציה גבוהים של צבירה מדידה, יכולת אנטי-הפרעות חזקה, השפעה נמוכה על ידי סביבה, חיי שירות ארוכים, תחזוקה פשוטה, ניתנים לחיבור לאורכי מדידה שונים ויכולים לשמור על דיוק יחידה, יכולת עיבוד טובה, עלות נמוכה, קל להעתקה וייצור אצווה. לכן, סנכרוניסטים נמצאים בשימוש נרחב בכלי מכונות גדולות ובמכונות בינוניות כעקירה דיגיטלית כדי לספק התקני תצוגה או בקרה.
מצב יישום: סנכרוני אינדוקציה נמצאים בשימוש נרחב למדידת תזוזה ליניארית, תזוזה זוויתית וכמויות פיזיקליות הקשורות אליהם, כגון מהירות סיבוב, רטט וכו'. סנכרון אינדוקציה ליניארי משמש לעתים קרובות במכונות דיוק גדולות, מכונות כרסום קואורדינטות ומכונות CNC אחרות בקרת מיקום כלים ותצוגה דיגיטלית; לעתים קרובות נעשה שימוש בסינכרון אינדוקציה מעגלי בצורך להגיע למעקב קבוע של האנטנה, להנחות הדרכה קפדנית, כלי מכונות מדויקים או מכשירי מדידה ומכשיר אינדקס ציוד וכו'.
מכונת זווית מתכווננת עצמית
מכונת זווית יישור עצמית היא שימוש במאפייני יישור עצמי של הזווית למתח AC או ממתח AC לזווית של מנוע המיקרו אינדוקציה, במערכת הסרוו משמשת כחיישן תזוזה למדידת הזווית. ניתן להשתמש במכונות ליישור עצמי גם כדי לשדר, להמיר, לקבל ולהצביע על אותות זווית למרחקים ארוכים. שני מנועים או יותר מקושרים באמצעות מעגלים כך ששני צירי סיבוב או יותר שאינם מחוברים זה לזה באופן מכני שומרים באופן אוטומטי על אותו שינוי בזווית, או מסתובבים באופן סינכרוני, ותכונה זו של המנוע נקראת מאפיין הצעד המשלב את עצמו. במערכת הסרוו, מכונת הכוונון העצמי המשמשת בצד המפיק נקראת משדר, ומכונת הכוונון העצמית המשמשת בצד המקבל נקראת מקלט.
מצב יישום: מכונת זווית מתאמת עצמית נמצאת בשימוש נרחב במטלורגיה, ניווט ומערכות חיווי אחרות לסינכרון מיקום וכיוון וארטילריה, מכ"ם ומערכות סרוו אחרות.
זה הסיכום שלי של קצת מידע על המעמד המוטורי, אם יש חסרונות או מקום לא תקין, מוזמן להשאיר תגובה. תודה לך!
אנחנו יצרן מקצועי של מנועים חשמליים בסין.

אם יש לך דרישה. אנא הודע לנו!







2 תגובות
היי, קראתי את המאמר שלך והמידע שלך מאוד מדהים וכל כך עוזר לי. תמשיך כך ותודה רבה. 🙂 מידע נוסף בכתובת https://tsca.com.ph/
תודה על הערותיך החמות!