 דלג לתוכן
דלג לתוכן 
כמעט מחצית מצריכת החשמל בעולם נצרכת על ידי מנועים חשמליים, כך שיעילותם הגבוהה של מנועים חשמליים היא המדד היעיל ביותר בפתרון בעיות האנרגיה בעולם.
סוגים של מנועים חשמליים
באופן כללי, הכוונה היא להפיכת הכוח שנוצר מזרימת הזרם בשדה מגנטי לפעולה סיבובית, ובטווח רחב, היא כוללת גם פעולה ליניארית.
בהתאם לסוג ספק הכוח המשמש להנעת המנוע, ישנם מנועי DC ו מנועים חשמליים AC.
ולפי עקרון הסיבוב המוטורי, ניתן לחלק אותו באופן גס לקטגוריות הבאות. (למעט מנועים מיוחדים)
מנועי DC חשמלי / DC (זרם ישר).
מנועים מוברש
מנועי המברשת הנפוצים נקראים בדרך כלל מנועים חשמליים DC.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
מנוע DC ללא מברשות
מנועי DC ללא מברשות אינם משתמשים במברשות או בקומוטטורים, אלא משתמשים בפונקציית מיתוג כגון טרנזיסטור כדי להחליף את הזרם ולבצע פעולת סיבוב.
מנוע צעדים.
מנוע זה פועל באופן סינכרוני עם הספק הדופק, ולכן נקרא גם מנוע אינדוקציה דופק.
הוא מאופיין ביכולת להשיג בקלות פעולת מיקום מדויקת.
מנועי AC
מנוע אסינכרוני
כוח AC יוצר שדה מגנטי מסתובב בסטטור, אשר בתורו יוצר זרם מושרה ברוטור, שבאינטראקציה שלו מתרחש סיבוב עבור מנוע אינדוקציה AC.
מנוע סינכרוני
כוח AC יוצר שדה מגנטי מסתובב, והרוטור עם הקטבים המגנטיים מסתובב בגלל המשיכה.
-מהירות הסיבוב מסונכרנת למרבה המזל עם תדירות אספקת החשמל.
על זרמים, שדות מגנטיים וכוחות
ראשית, למען ההסברים העקרוניים המוטוריים הבאים, נסקור את החוקים/החוקים הבסיסיים לגבי זרם, שדה מגנטי וכוח.
למרות שיש תחושת נוסטלגיה, קל לשכוח את הידע הזה אם אתה לא נוהג להשתמש ברכיבים מגנטיים
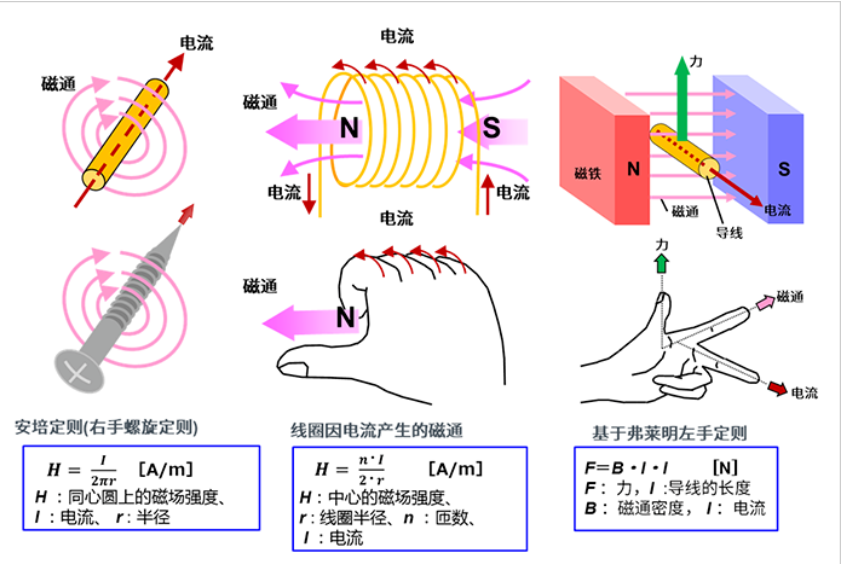
אנו משלבים תמונות ונוסחאות להמחשה.
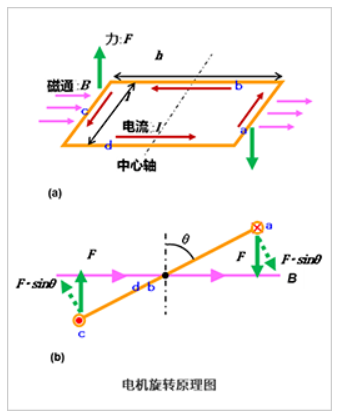
כאשר מסגרת החוט מלבנית, הכוח הפועל על הזרם נלקח בחשבון.
הכוח F הפועל על החלקים של הצלעות a ו-c הוא
המומנט נוצר כשהציר המרכזי הוא הציר המרכזי.
לדוגמה, כאשר בוחנים מצב שבו זווית הסיבוב היא רק θ, הכוח הפועל בזווית ישרה ל-b ו-d הוא sinθ, כך שהמומנט Ta של החלק a ניתן על ידי:
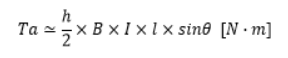
בהתחשב בחלק ג' באותו אופן, המומנט מוכפל ויוצר את המומנט המחושב על ידי המשוואה הבאה

מכיוון ששטח המלבן הוא S = h・l, החלפתו במשוואה שלעיל נותנת את התוצאה הבאה.

הנוסחה חלה לא רק על מלבנים, אלא גם על צורות נפוצות אחרות כגון עיגולים. המנוע עושה שימוש בעקרון זה.
איך מנוע חשמלי מסתובב?
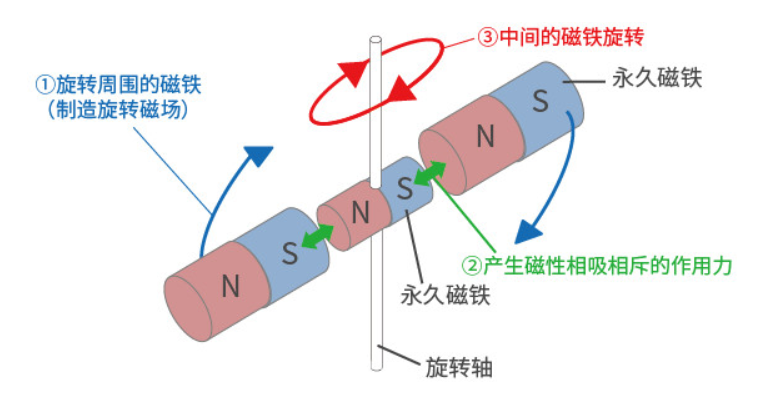
1) מנועי האינדוקציה מסתובבים בעזרת מגנטים וכוח מגנטי
מסביב למגנט קבוע עם פיר מסתובב,
① המגנט מסובב (כך שנוצר שדה מגנטי מסתובב),
② אז לפי העיקרון שקטבים N ו-S מושכים זה את זה בקטבים שונים ודוחים זה את זה באותה רמה,
③ המגנט עם פיר מסתובב יסתובב.
זהו העיקרון הבסיסי של סיבוב מנועי AC.
הזרם הזורם במוליך גורם לשדה מגנטי מסתובב (כוח מגנטי) סביבו וכך המגנט מסתובב, שזהו למעשה אותו מצב פעולה כמו זה.
בנוסף, כאשר החוט מלופף בצורת סליל, הכוח המגנטי מסונתז, ויוצר שטף שדה מגנטי גדול (שטף) המייצר קטבים N ו-S.
בנוסף, על ידי הכנסת ליבת ברזל לתוך החוט דמוי הסליל, קווי הכוח המגנטיים הופכים קלים למעבר וניתן ליצור כוח מגנטי חזק יותר.
2) מנוע מסתובב בפועל
כאן, כשיטה מעשית של סיבוב מנוע, אנו מציגים את השיטה ליצירת שדה מגנטי מסתובב באמצעות מנוע AC תלת פאזי וסלילים.
(מנועי AC תעשייתיים תלת פאזיים הם אות AC המרוחקים 120 מעלות זה מזה בשלב)
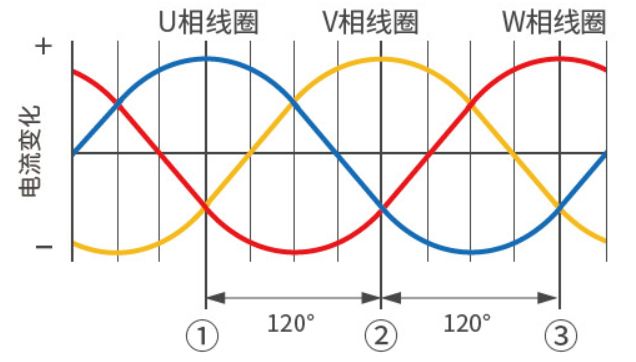
השדה המגנטי הסינתטי במצב ① למעלה מתאים לאיור ① למטה.
השדה המגנטי הסינתטי במצב ② למעלה מתאים לאיור ② למטה.
השדה המגנטי הסינתטי במצב ③ לעיל מתאים לאיור ③ למטה.
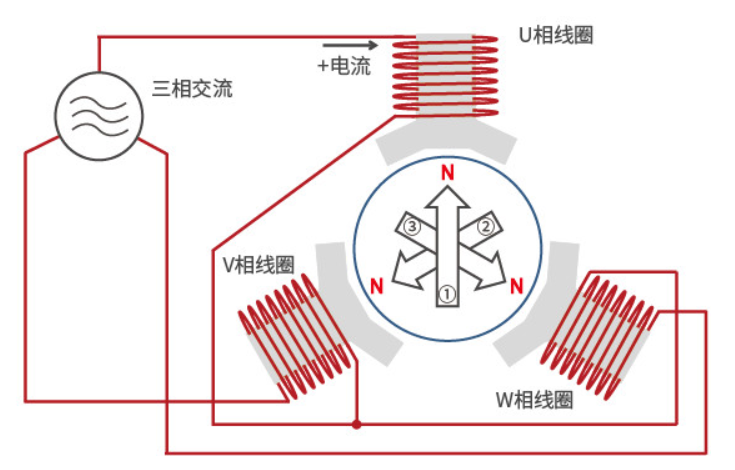
כפי שהוזכר לעיל, הסלילים של הליבה הפותה מחולקים לשלושה שלבים, עם תצורת מרווח של 120° של סלילי U-פאזה, סלילי V-פאזה וסלילי W-פאזה, כאשר הסליל עם מתח גבוה מייצר N-קוטב סליל עם עמוד S המייצר מתח נמוך.

כל פאזה משתנה בהתאם לגל סינוס, ולכן הקוטביות (קוטב N, קוטב S) והשדה המגנטי שלו (כוח מגנטי) שנוצר על ידי כל סליל ישתנו.
בשלב זה, הסליל שמייצר קוטב N לבדו משתנה ברצף בהתאם לסליל U-phase → V-phase coil → W-phase coil → U-phase coil, וכך מתרחש סיבוב.

מבנה של מנוע קטן
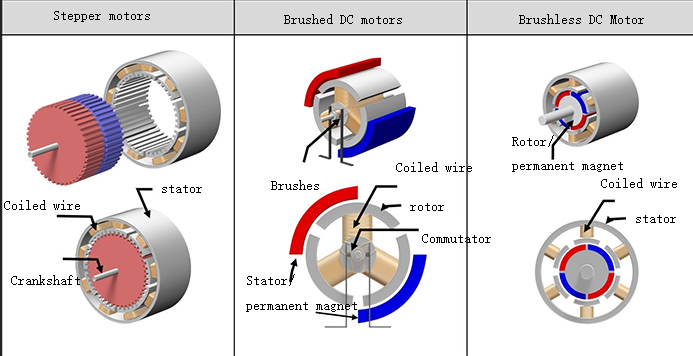
האיור הבא נותן את המבנה המשוער וההשוואה של שלושה סוגים של מנועים תעשייתיים: מנועי צעד, מנועי DC (DC) מוברשים ומנועי DC (DC) ללא מברשות.
המרכיבים הבסיסיים של מנועים אלו הם בעיקר סלילים, מגנטים ורוטורים, ויש גם סוגים מקובעים סלילים ומגנטים בהתאם לסוג.
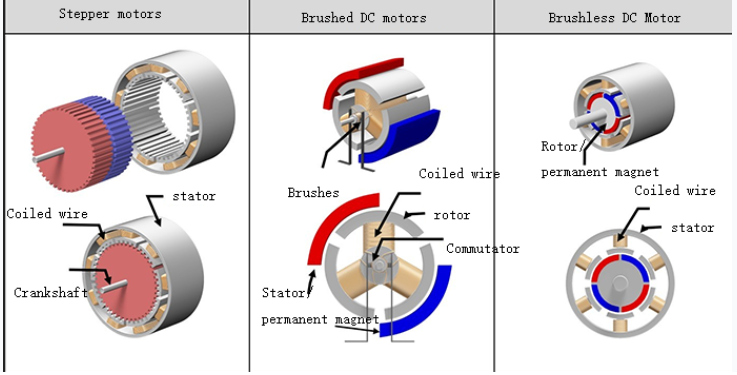
להלן תיאור של המבנה המשויך לתרשים לדוגמה. מכיוון שעשויים להיות מבנים אחרים אם מחולקים בזהירות רבה יותר, אנא הבינו שהמבנה המוצג במאמר זה נמצא תחת מסגרת גדולה.
הסליל של מנוע הצעד כאן קבוע בצד החיצוני והמגנט מסובב בצד הפנימי.
כאן המגנט של מנוע ה-DC המוברש מקובע בצד החיצוני והסליל מסתובב בצד הפנימי. ט
המברשות והקומוטטור אחראים לאספקת חשמל לסליל ולשינוי כיוון הזרם.
במקרה של מנוע ללא מברשות, הסליל מקובע מבחוץ והמגנט מסתובב מבפנים.
המבנה של מנוע ללא מברשות שונה גם אם הרכיבים הבסיסיים זהים בגלל סוגי המנועים השונים. הפרטים יוסברו בכל סעיף.
מנוע מברשת
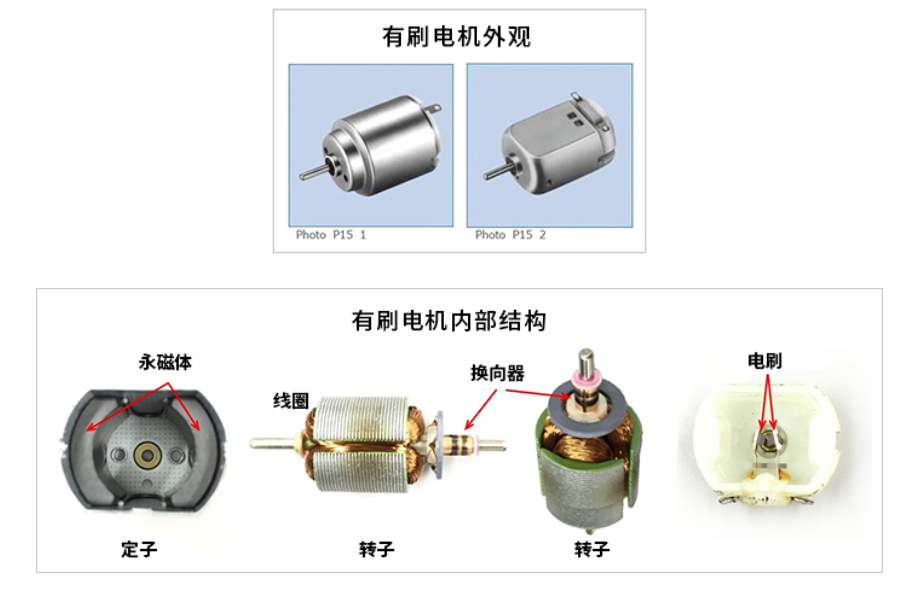
מבנה של מנועי DC מוברש
להלן המראה של מנוע DC מוברש המשמש לעתים קרובות בדגמים, ותרשים סכמטי של התמוטטות של מנוע רגיל דו-קוטבי (2 מגנטים) בעל שלושה חריצים (3 סלילים). אולי לרבים מכם יש ניסיון בפירוק המנוע החשמלי DC והוצאת המגנטים.
אתה יכול לראות שהמגנטים הקבועים של מנוע DC מוברש קבועים, והסלילים של מנוע DC מוברש יכולים להסתובב סביב המרכז הפנימי.
The fixed side is called the "stator" and the rotating side is called the "rotor".
להלן סקיצה מבנית המייצגת את מושג המבנה.
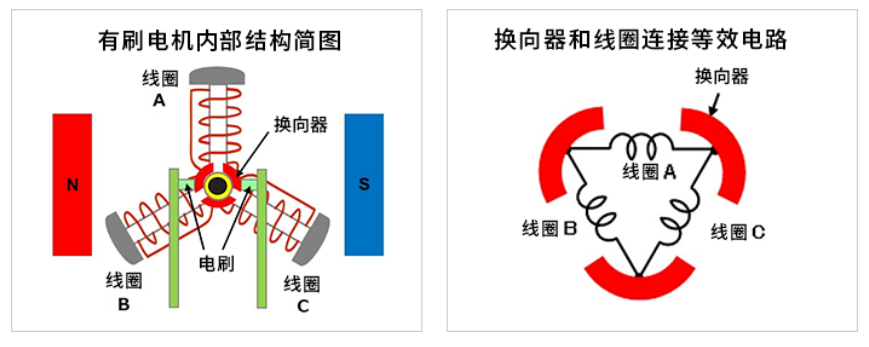
בפריפריה של הציר המרכזי המסתובב שלושה קומוטטורים (יריעות מתכת מכופפות למיתוג זרם).
כדי למנוע מגע זה עם זה, הקומוטטורים מוגדרים במרחק של 120° זה מזה (360° ÷ 3 חלקים). הקומוטטורים מסתובבים עם סיבוב הציר.
קומוטטור אחד מחובר לקצה סליל אחד ולקצה הסליל השני, ושלושת הקומוטטורים ושלושת הסלילים יוצרים שלם (טבעת) כרשת מעגלים.
שתי מברשות מקובעות ב-0° ו-180° כדי ליצור מגע עם הקומוטטור.
ספק כוח DC חיצוני מחובר למברשות והזרם זורם במברשת הנתיב → קומוטטור → סליל → מברשת.
עקרון סיבוב של מנוע DC מברשת
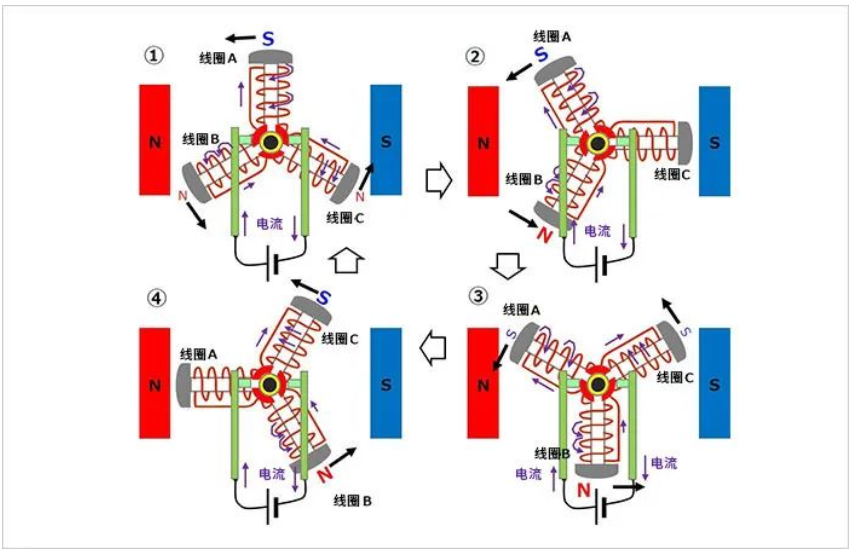
① סובב נגד כיוון השעון מהמצב ההתחלתי
סליל A נמצא בחלק העליון ומחבר את אספקת כלי החשמל למברשות, קבע את הצד השמאלי כ-(+) ואת הצד הימני כ-(-).
זרם גדול זורם מהמברשת השמאלית דרך הקומוטטור לסליל A.
זהו המבנה שבו החלק העליון (החוץ) של סליל A הופך לקוטב S.
ומכיוון ש-1/2 מהזרם מסליל A זורם מהמברשת השמאלית לסלילים B ו-C בכיוון ההפוך של סליל A, הצדדים החיצוניים של סלילים B ו-C הופכים לקטבים N חלשים (מסומנים באותיות מעט קטנות יותר ב- דמות).
השדות המגנטיים הנוצרים בסלילים אלו וההשפעות הדוחות והמושכות של המגנטים גורמים לסלילים להיות נתונים לכוח מסתובב נגד כיוון השעון.
② סיבוב נוסף נגד כיוון השעון
לאחר מכן, נניח שהמברשת הימנית נמצאת במגע עם שני הקומוטטורים במצב שבו סליל A מסובב 30° נגד כיוון השעון.
הזרם של סליל A זורם ברציפות מהמברשת השמאלית דרך המברשת הימנית והצד החיצוני של הסליל נשאר קוטב S.
אותו זרם כמו סליל A זורם דרך סליל B, והצד החיצוני של סליל B הופך להיות חזק יותר בקוטב N.
מכיוון שקצוות סליל C מקוצרים על ידי המברשות, לא זורם זרם ולא נוצר שדה מגנטי.
גם במקרה זה, יש כוח מסתובב נגד כיוון השעון.
הסליל בצד העליון מ- ③ עד ④ נתון ברציפות לכוח הנע שמאלה, והסליל התחתון נתון ללא הרף לכוח הנע ימינה, וממשיך להסתובב נגד כיוון השעון
כאשר הסליל מסתובב כל 30° ל-③ ו-④, הצד החיצוני של הסליל הופך לקוטב S כאשר הסליל נמצא מעל הציר האופקי המרכזי; כאשר הסליל נמצא מתחת, הוא הופך לקוטב N, והתנועה חוזרת על עצמה.
במילים אחרות, הסליל העליון נתון שוב ושוב לכוח הנע שמאלה והסליל התחתון נתון שוב ושוב לכוח הנע ימינה (שניהם נגד כיוון השעון). זה גורם לרוטור להסתובב נגד כיוון השעון בכל עת.
אם מתחברים חשמל למברשת השמאלית הנגדית (-) ולמברשת הימנית (+), נוצר שדה מגנטי בפיתולי הסטטור של הסלילים בכיוון ההפוך, כך שהכוח המופעל על הסלילים נע בכיוון ההפוך והופך לסיבוב בכיוון השעון. .
בנוסף, בעת ניתוק החשמל, הרוטור של המנוע המוברש מפסיק להסתובב כי הוא משולל מהשדה המגנטי שגורם לו להסתובב.
מנוע תלת פאזי ללא מברשות עם גל מלא
מראה ומבנה של מנוע תלת פאזי ללא מברשות עם גלים מלאים
האיור הבא מציג דוגמה למראה ולמבנה של מנוע ללא מברשות.
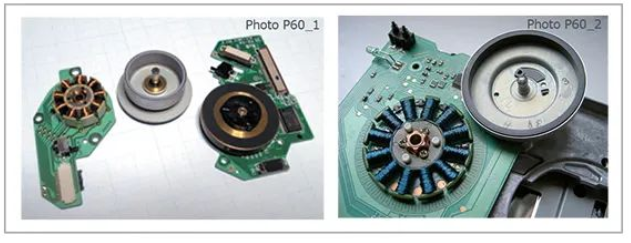
בצד שמאל יש דוגמה למנוע ציר המשמש לסיבוב דיסק בהתקן להשמעת דיסק. ישנם 9 סלילים של שלושה שלבים x 3. בצד ימין יש דוגמה למנוע ציר עבור התקן FDD עם 12 סלילים (תלת פאזי x 4). הסלילים קבועים על הלוח ומפותלים על הליבה.
החלק בצורת דיסק בצד ימין של הסלילים הוא רוטור המגנט הקבוע. ציר הרוטור מוחדר למרכז הסליל ומכסה את חלק הסליל, והמגנטים הקבועים מקיפים את היקפית של הסליל.
המבנה הפנימי של המנוע תלת-פאזי ללא מברשות ללא מברשות ומעגל שווה ערך של חיבור הסליל
הבא הוא סקיצה של המבנה הפנימי והמעגל המקביל של חיבור הסליל.
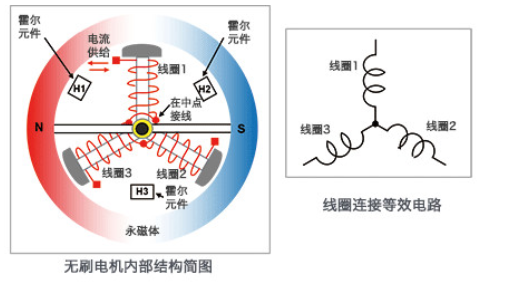
שרטוט המבנה הפנימי הזה הוא דוגמה למנוע דו-קוטבי (2 מגנטים) בעל 3 חריצים (3 סלילים) עם מבנה פשוט מאוד. זה דומה למבנה של מנוע מוברש עם אותו מספר של קטבים וחריצים, אבל צד הסליל קבוע וניתן לסובב את המגנטים. כמובן, אין מברשות.
במקרה זה, הסלילים מחוברים בצורת Y ואלמנט מוליך למחצה משמש לאספקת זרם לסלילים, השולט על כניסת ויציאת הזרם בהתאם למיקום המגנטים המסתובבים.
בדוגמה זו, אלמנט הול משמש לזיהוי מיקום המגנט. אלמנט ההול מוגדר בין הסליל לסליל כדי לזהות את המתח שנוצר ומשמש כמידע מיקום על סמך עוצמת השדה המגנטי. בתמונה של מנוע הציר FDD שניתנה קודם לכן, ניתן לראות גם את אלמנט ה- Hall המשמש לזיהוי המיקום בין הסליל לסליל (מעל הסליל).
אלמנטים של הול ידועים בתור חיישנים מגנטיים.
הוא יכול להמיר את גודל השדה המגנטי לגודל המתח ולהצביע על כיוון השדה המגנטי במונחים חיוביים או שליליים.
להלן תרשים המציג את אפקט הול.
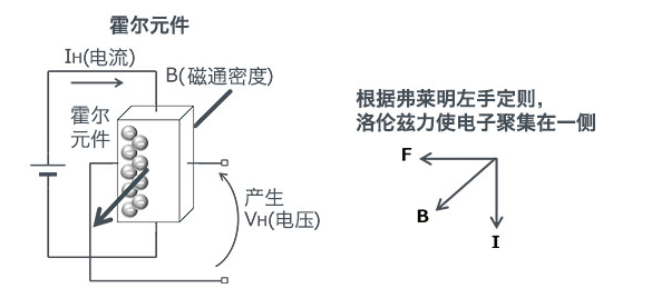
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
המתח המתקבל VH מבוטא במשוואה הבאה.
VH = (KH / d)・IH・B ※KH: מקדם הול, d: עובי משטח חדירת השטף
כפי שמראה הנוסחה, ככל שהזרם גבוה יותר, כך המתח גבוה יותר. תכונה זו משמשת לעתים קרובות לזיהוי מיקום הרוטור (מגנט).
עקרון סיבוב של מנוע תלת פאזי ללא מברשות עם גלים מלאים
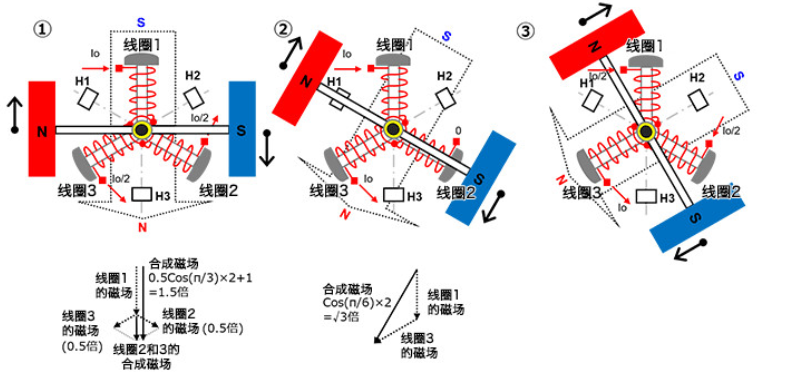
עקרון הסיבוב של המנוע חסר המברשות יוסבר בשלבים הבאים ① עד ⑥. להבנה קלה, המגנט הקבוע מפושט כאן מעיגול למלבן.
①
בסליל תלת פאזי, יש לקבע את סליל 1 בשעה 12, לסליל 2 להיות קבוע בשעה 4 ולקבע את סליל 3 בשעה 8 בשעון. תן לקוטב ה-N של המגנט הקבוע הדו-קוטבי להיות בצד שמאל ולקוטב ה-S בצד ימין וניתן לסיבוב.
גרם לזרם Io לזרום לתוך סליל 1 כדי לייצר את השדה המגנטי של קוטב S בצד החיצוני של הסליל. תן לזרם Io/2 לזרום מתוך סליל 2 ומסליל 3 כדי לייצר שדה מגנטי בקוטב N בצד החיצוני של הסליל.
כאשר השדות המגנטיים של סלילים 2 ו-3 מסונתזים וקטורי, השדה המגנטי של קוטב N נוצר כלפי מטה, שהוא פי 0.5 מגודל השדה המגנטי שנוצר כאשר הזרם Io עובר דרך סליל, והופך להיות פי 1.5 מהגודל כאשר נוסף לשדה המגנטי של סליל 1. זה מייצר שדה מגנטי סינטטי בזווית של 90° ביחס למגנט הקבוע, כך שניתן ליצור את המומנט המרבי והמגנט הקבוע מסתובב בכיוון השעון.
כאשר הזרם בסליל 2 מופחת והזרם בסליל 3 גדל בהתאם למצב הסיבוב, גם השדה המגנטי הסינטטי מסתובב בכיוון השעון והמגנט הקבוע ממשיך להסתובב.
②
במצב מסובב של 30°, הזרם Io זורם לתוך סליל 1 כך שהזרם בסליל 2 הוא אפס, מה שגורם לזרם Io לזרום מתוך סליל 3.
הצד החיצוני של סליל 1 הופך לקוטב S והצד החיצוני של סליל 3 הופך לקוטב N. כאשר הווקטור מסונתז, השדה המגנטי שנוצר הוא פי 3 (≈1.72) מהשדה המגנטי שנוצר כאשר הזרם Io עובר דרך סליל אחד. זה גם מייצר שדה מגנטי מסונתז בזווית של 90 מעלות ביחס לשדה המגנטי של המגנט הקבוע, ומסתובב עם כיוון השעון.
כאשר זרם הכניסה Io של סליל 1 מופחת בהתאם למצב הסיבוב, זרם הכניסה של סליל 2 גדל מאפס, וזרם היציאה של סליל 3 גדל ל-Io, השדה המגנטי הסינתטי מסתובב גם הוא בכיוון השעון, והזרם הקבוע המגנט ממשיך להסתובב.
בהנחה שהזרם בכל שלב הוא סינוסואידי, ערך הזרם כאן הוא Io × sin(π⁄3) = Io × √3⁄2. על ידי סינתזה וקטורית של השדה המגנטי, גודל השדה המגנטי הכולל הוא (√3⁄2)2 × 2 = פי 1.5 מהשדה המגנטי שנוצר על ידי סליל אחד. כאשר הזרמים בכל שלב הם סינוסואידים, גודל השדה המגנטי של סינתזה וקטור הוא פי 1.5 מהשדה המגנטי שמפיק סליל אחד ללא קשר למיקום המגנט הקבוע, והשדה המגנטי נמצא בזווית של 90° ביחס ל השדה המגנטי של המגנט הקבוע.
③
במצב שבו הסיבוב נמשך 30°, זרם Io/2 זורם לתוך סליל 1, זרם Io/2 זורם לסליל 2, וזרם Io זורם מתוך סליל 3.
הצד החיצוני של סליל 1 הופך לקוטב S, הצד החיצוני של סליל 2 הופך גם הוא לקוטב S, והצד החיצוני של סליל 3 הופך לקוטב N. כאשר הווקטור מסונתז, השדה המגנטי שנוצר הוא פי 1.5 מהשדה המגנטי שנוצר כאשר הזרם Io זורם דרך סליל אחד (זהה כמו ①). גם כאן נוצר שדה מגנטי סינטטי בזווית של 90° ביחס לשדה המגנטי של המגנט הקבוע, והוא מסתובב בכיוון השעון.
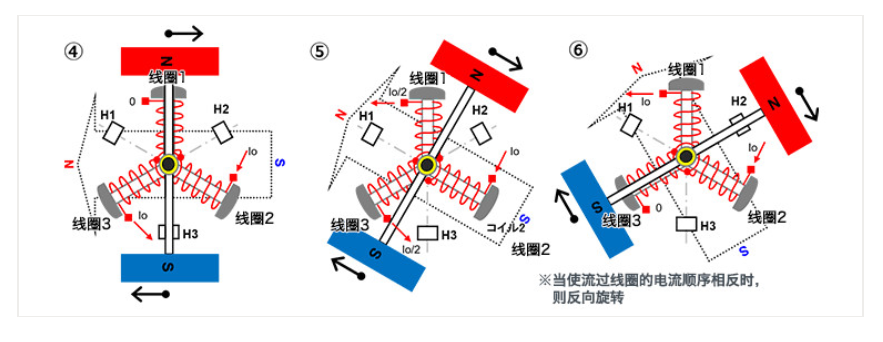
④~⑥
סובב באותו אופן כמו ① ל③.
בדרך זו, אם הזרם הזורם לתוך הסליל משתנה ברציפות ברצף בהתאם למיקום המגנט הקבוע, המגנט הקבוע יסתובב בכיוון קבוע. באופן דומה, אם הזרם מתהפך וכיוון השדה המגנטי הסינטטי מתהפך, הוא יסתובב נגד כיוון השעון.
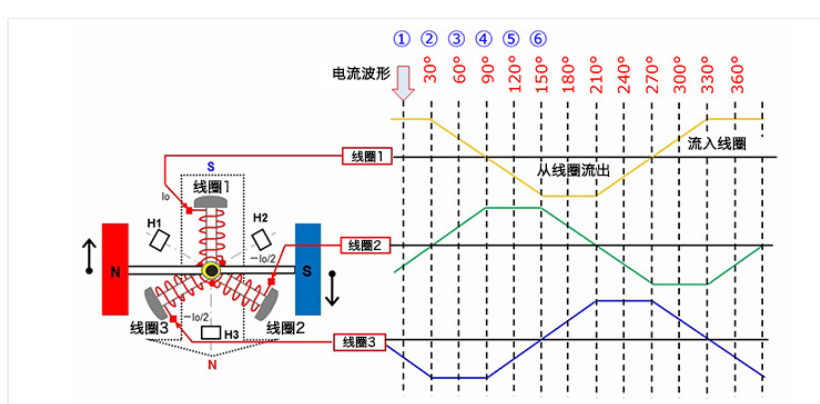
התרשים הבא מציג את הזרמים בכל סליל עבור כל אחד מהשלבים ① עד ⑥ לעיל ברצף. הקשר בין שינוי נוכחי וסיבוב צריך להיות מובן על ידי התיאור לעיל.
מנועי צעד
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
מבנה מנוע צעד (דו-פאזי דו-פאזי)
התרשימים הבאים, משמאל לימין, מציגים דוגמה להופעת מנוע צעד, שרטוט של המבנה הפנימי ושרטוט של קונספט המבנה.
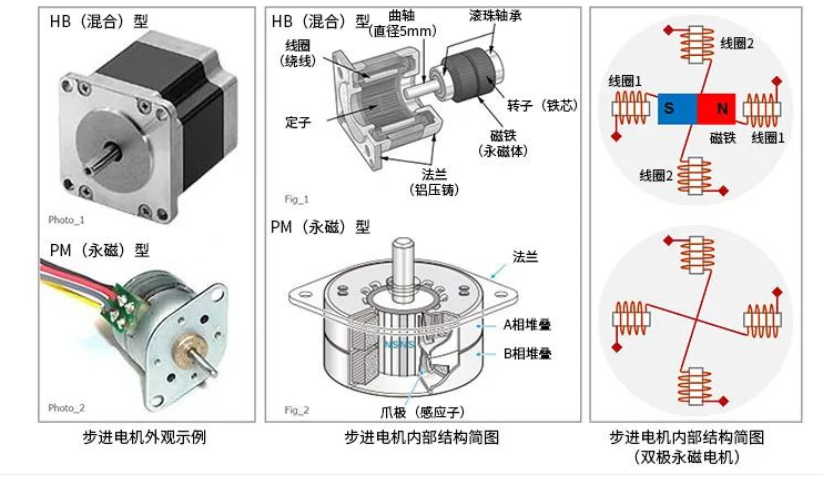
בדוגמה למראה, המראה של מנועי צעד מסוג HB (היברידי) ו-PM (מגנט קבוע). תרשים המבנה באמצע נתון גם עבור סוג HB וסוג PM.
מנוע הצעד הוא מבנה שבו הסליל מקובע והמגנט הקבוע מסתובב. הדיאגרמה המושגית של המבנה הפנימי של מנוע צעד בצד ימין היא דוגמה למנוע PM המשתמש דו-פאזי (שני סטים) של סלילים. בדוגמה של מבנה מנוע צעד בסיסי, הסלילים מוגדרים מבחוץ והמגנטים הקבועים מוגדרים מבפנים. בנוסף לסלילים דו-פאזיים, ישנם גם סוגים עם מספר גדול יותר של פאזות כגון תלת-פאזי וחמש-פאזי.
לכמה מנועי צעד יש מבנים שונים אחרים, אך המבנה הבסיסי של מנוע הצעד ניתן במאמר זה כדי להקל על הצגת עקרון הפעולה שלו. באמצעות מאמר זה, אנו מקווים להבין את המבנה הבסיסי של מנועי צעד עם סלילים קבועים ומגנטים קבועים מסתובבים.
עקרון עבודה בסיסי של מנוע צעד (עירור חד פאזי)
התרשים הבא משמש כדי להציג את עקרון הפעולה הבסיסי של מנוע צעד. זוהי דוגמה לעירור עבור כל פאזה (סט סלילים) של הסלילים הדו-פאזיים מהסוג הדו-פאזי שלמעלה. הנחת היסוד של התרשים היא שהמצב משתנה מ-① ל-④. הסלילים מורכבים מסליל 1 וסליל 2, בהתאמה. בנוסף, חיצי הזרם מציינים את כיוון זרימת הזרם.
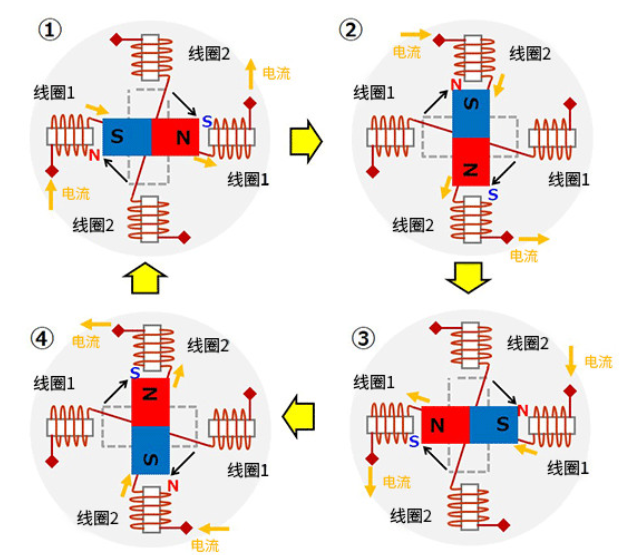
①
・גרמו לזרם לזרום מהצד השמאלי של סליל 1 והחוצה מהצד הימני של סליל 1.
・אל תאפשר לזרם לזרום דרך סליל 2.
・בזמן זה, הצד הפנימי של סליל 1 הופך ל-N והצד הפנימי של סליל 1 הופך ל-S.
・כתוצאה מכך, המגנט הקבוע האמצעי נמשך על ידי השדה המגנטי של סליל 1 ומשתנה לצד שמאל S ולצד ימין N ועוצר.
②
・הזרם של סליל 1 נעצר כך שהזרם זורם פנימה מהצד העליון של סליל 2 ויוצא מהצד התחתון של סליל 2.
・הצד הפנימי של סליל 2 העליון משתנה ל-N והצד הפנימי של סליל 2 התחתון משתנה ל-S.
・המגנט הקבוע נמשך על ידי השדה המגנטי שלו ומסתובב 90° בכיוון השעון כדי לעצור.
③
・הזרם של סליל 2 נעצר כך שהזרם זורם מהצד הימני של סליל 1 ויוצא מהצד השמאלי של סליל 1.
・הצד הפנימי של הסליל השמאלי 1 הופך ל-S והצד הפנימי של הסליל הימני 1 הופך ל-N.
・המגנט הקבוע נמשך על ידי השדה המגנטי שלו ומסתובב עם כיוון השעון בעוד 90° כדי לעצור.
④
・עצור את הזרם בסליל 1 כך שהזרם יזרום מהצד התחתון של סליל 2 ויצא מהצד העליון של סליל 2.
・הצד הפנימי של סליל 2 העליון הופך ל-S והצד הפנימי של סליל 2 התחתון הופך ל-N.
・המגנט הקבוע נמשך על ידי השדה המגנטי שלו ומסתובב עם כיוון השעון בעוד 90° כדי לעצור.
ניתן לסובב את מנוע הצעד על ידי החלפת הזרם הזורם דרך הסליל על ידי המעגל האלקטרוני בסדר של ① עד ④ למעלה. בדוגמה זו, כל פעולת מיתוג גורמת למנוע הצעד להסתובב 90°.
בנוסף, כאשר הזרם זורם ברציפות דרך סליל, ניתן לשמור על מצב העצירה ולמנוע הצעד יכול להיות מומנט החזקה. אגב, אם סדר הזרם הזורם דרך הסליל הפוך, ניתן לגרום למנוע הצעד להסתובב הפוך.
מצא יצרן מנועים תעשייתיים מקצועי - Dongchun motor China







