 דלג לתוכן
דלג לתוכן מה ההבדל בין מנוע ללא מברשות למנוע מוברש?
מה ההבדל בין מנוע סינכרוני למנוע אסינכרוני?
מה דעתך על מנוע האינדוקציה של רוטור הפצע?
האם כל מנועי הסרוו הם מנועי AC?
האם כל מנועי הסרוו מנועים סינכרוניים?
האם מנועי צעד שייכים למנועי DC או למנועי AC?
האם מנוע סרוו הוא מנוע סרוו? ......
חז"ל אמרו פעם: אם הידע אינו שיטתי, מה ההבדל בינו לבין פסקה?
אבל ספר החכמים על הטקסט הארוך הזה, הטרמינולוגיה הזויה ההיא, ההסבר הסביר הזה, באמת מסתכלים על אנשים בעננים.
גם אני חיפשתי הרבה זמן באינטרנט, לא מצאתי הסבר שיטתי יותר על מבנה המנועים החשמליים ועקרון הסיווג, אז הם עשו מאמצים רבים כדי לשאול ולארגן עותק.
מאמר זה מנסה להסביר את הידע השיטתי בשפה פשוטה, ומשתמש בהרבה אנימציה ותמונות כדי לבטא את הידע הלא ברור בצורה חיה.
בשל הידע המצומצם שלי, אין מנוס מהרבה טעויות, נא לתקן את המומחים, אנא אל תהססו לייעץ.
1. תרשים להסבר הסוגים הבסיסיים של מנועים חשמליים

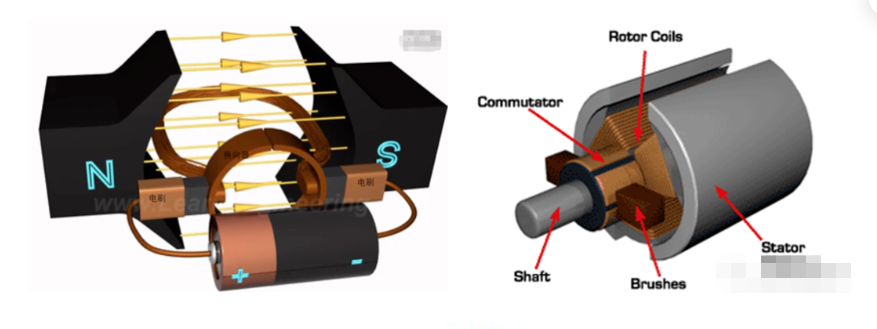
2. מנוע חשמלי DC - מנוע מברשת
קראו את הפיזיקה של בית הספר התיכוני של חלאות הבריונים דעו, כדי ללמוד את המוליך הנמרץ בכוח השדה המגנטי של הדבר הזה, אימנו את יד שמאל לכף יד שבורה, שזה בדיוק העיקרון של מנוע אינדוקציה DC.
כל המנועים החשמליים מורכבים מסטאטור ורוטור, במנועים חשמליים DC, כדי לגרום לרוטור להסתובב, צריך לשנות כל הזמן את כיוון הזרם, אחרת הרוטור יכול להסתובב רק חצי סיבוב, זה כמו דוושת אופניים .
זו הסיבה שמנועי DC זקוקים לקומוטטורים.
באופן כללי, מנועי DC מוברש כוללים מנועים מוברשים ומנועים ללא מברשות.
מנוע מברשת נקרא גם מנוע אינדוקציה DC או מנוע מברשת פחמן, המכונה לעתים קרובות מנוע DC מברשת.
הוא משתמש בקומוטציה מכנית, הקוטב החיצוני אינו מזיז את הסליל הפנימי (ארמטורה) נע, סליל הקומוטטור והרוטור מסתובבים יחד, מברשות ומגנטים אינם זזים, ולכן חיכוך הקומוטטור והמברשת, משלימים את החלפת הכיוון הנוכחית.
חסרונות מנוע מברשת.
1, הסבה מכנית של ניצוצות שנוצרו על ידי חיכוך הקומוטטור והמברשת, הפרעות אלקטרומגנטיות, רעש גבוה, חיים קצרים.
2, אמינות ירודה, כשלים רבים, הדורשים תחזוקה תכופה.
3, בשל נוכחות של קומוטטור, הגבלת אינרציה הרוטור, הגבלת המהירות המרבית, המשפיעה על הביצועים הדינמיים.
מכיוון שיש לו כל כך הרבה חסרונות מדוע הוא עדיין נפוץ, כי זה מומנט גבוה, מבנה פשוט תחזוקה קלה (כלומר להחליף מברשות פחמן), זול.
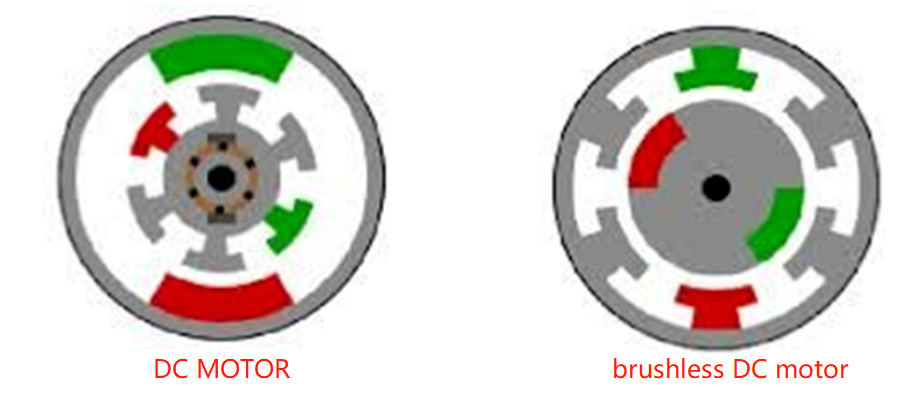
2. מנועי DC - מנועים ללא מברשות
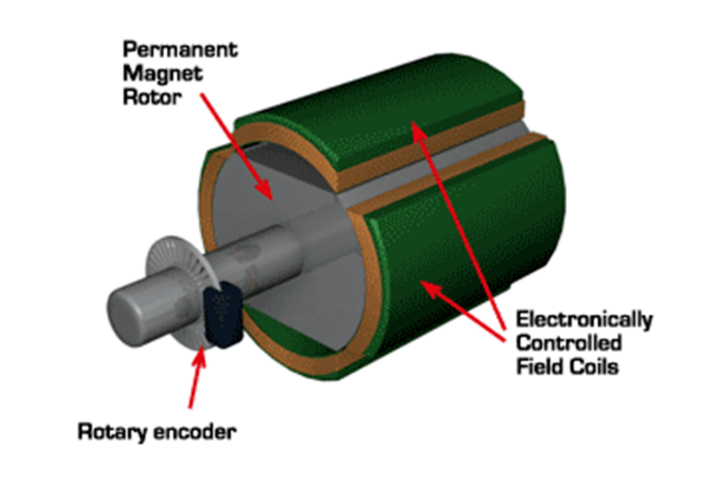
מנוע ללא מברשות נקרא גם מנוע DC מהפך (BLDC) בתחומים מסוימים, הוא משתמש בקומוטציה אלקטרונית (חיישן הול), הסליל (אבזור) אינו מזיז את הקטבים המגנטיים נעים, ואז המגנט הקבוע יכול להיות מחוץ לסליל או בתוך הסליל , כך שיש מנוע רוטור חיצוני ללא מברשות ומנוע רוטור פנימי ללא מברשות
מנועים ללא מברשות בנויים באותו אופן כמו מנועים סינכרוניים מגנט קבוע.
עם זאת, מנוע יחיד ללא מברשות אינו מערכת כוח שלמה. Brushless בעצם חייב להיות נשלט על ידי בקר ללא מברשות, המכונה גם ESC, כדי להשיג פעולה רציפה.
הנגיד האלקטרוני חסר המברשות (ESC) הוא זה שבאמת קובע את הביצועים שלו.
באופן כללי, ישנם שני סוגים של זרמי הנעה עבור מנועים ללא מברשות, האחד הוא גל מרובע והשני הוא גל סינוס.
לפעמים הראשון נקרא מנוע DC ללא מברשות, והשני נקרא מנוע AC סרוו, שהוא בדיוק סוג של מנוע AC סרוו.
מנועים ללא מברשות פועלים בדרכים שונות, וניתן לחלקם למנועי מברשת פנימיים עם רוטור ולמנועים ללא מברשות עם רוטור חיצוני.
הרוטור הפנימי הוא תלת פאזי, וזה יקר יותר.
הרוטור החיצוני משמש בדרך כלל חד פאזי, המחיר של האנשים, ייצור המוני היה קרוב למנוע מברשת פחמן, ולכן בשנים האחרונות נעשה שימוש נרחב.
מחיר הרוטור החיצוני תלת פאזי קרוב למחיר הרוטור הפנימי.
ובכן, כפי שאתם יכולים לנחש, החיסרון של מנועי מברשת הוא הנקודה של מנועים ללא מברשות.
יש לו יעילות גבוהה, צריכת אנרגיה נמוכה, רעש נמוך, חיים ארוכים, אמינות גבוהה, בקרת סרוו, מהירות המרת תדר ללא מדרגות (עד מהירות גבוהה מאוד) ויתרונות נוספים.
זה יחסית קטן ממנוע DC מברשת, שליטה מאשר מנוע AC אסינכרוני היא פשוטה, מומנט ההתחלה הוא קיבולת עומס יתר גדולה, לגבי החסרונות ...... יקר יותר מהמברשת, תחזוקה גרועה.
2. מנוע DC - עקרון בקרת מהירות
ויסות מהירות מנוע אינדוקציה DC: מה שנקרא ויסות מהירות, כלומר על ידי התאמת מהירות המנוע כדי להשיג את המומנט הנדרש.
מנוע dc מגנט קבוע על ידי התאמת המתח, התנגדות סדרה, שינוי עירור יכול להיות מהירות, אבל התאמת המתח בפועל היא הנוחה ביותר והנפוץ ביותר בשימוש, השימוש העיקרי של ויסות מהירות PWM.
PWM הוא למעשה דרך המתג במהירות גבוהה כדי להשיג ויסות מתח DC, מחזור, פתוח זמן רב, המתח הממוצע גבוה, כבוי זמן רב, המתח הממוצע נמוך, נוח מאוד להתאמה, כל עוד המתג מהירות כל עוד מהירות המעבר מהירה מספיק, ההרמוניות של הרשת פחותות, והזרם רציף יותר.
עם זאת, המברשות והקומוטטור נשחקים לאורך זמן, ובמקביל חל שינוי זרם עצום במהלך הקומוטציה, שקל מאוד לייצר ניצוצות.
הקומוטטור והמברשות מגבילים את הקיבולת והמהירות של מנוע אינדוקציה DC, מה שגורם לוויסות המהירות של מנוע אינדוקציה DC לעמוד בצוואר בקבוק.
עבור מנוע אינדוקציה DC ללא מברשות, בקרת המהירות שולטת רק במתח הכניסה על פני השטח.
אבל מערכת בקרת תדר הבקרה העצמית של המנוע (מנוע DC נטול מברשות עצמו מגיע עם גלאי מיקום רוטור ומכשיר אחר לרכישת אותות מיקום הרוטור, תוך שימוש באות מיקום הרוטור של התקן זה כדי לשלוט על רגע שינוי הפאזה של מכשיר בקרת תדר מתח משתנה) שולט אוטומטית התדר לפי המתח המשתנה, שהוא כמעט זהה למנוע DC (מוברש), נוח מאוד. מאוד נוח.
מכיוון שהרוטור משתמש במגנטים קבועים, ללא פיתול עירור מיוחד, במקרה של אותה קיבולת, המנוע קטן יותר, קל יותר, יעיל יותר, קומפקטי יותר, פעולה אמינה יותר, ביצועים דינמיים טובים יותר, בהנעה של כלי רכב חשמליים והיבטים נוספים היו בשימוש נרחב.
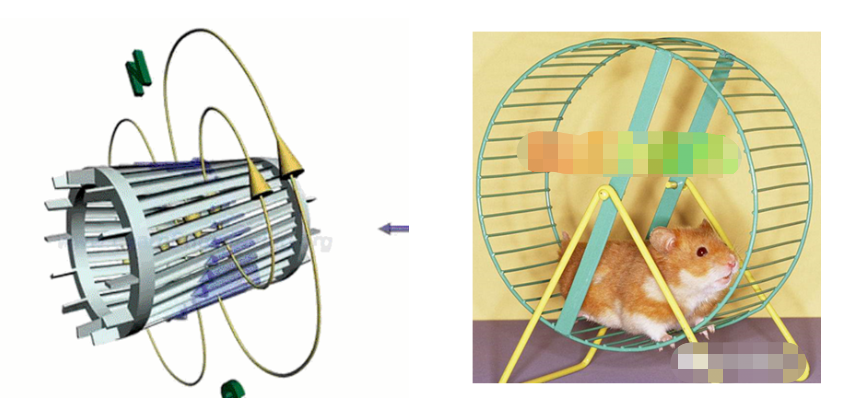
3. מנועי AC תלת פאזיים - מנועים אסינכרוניים
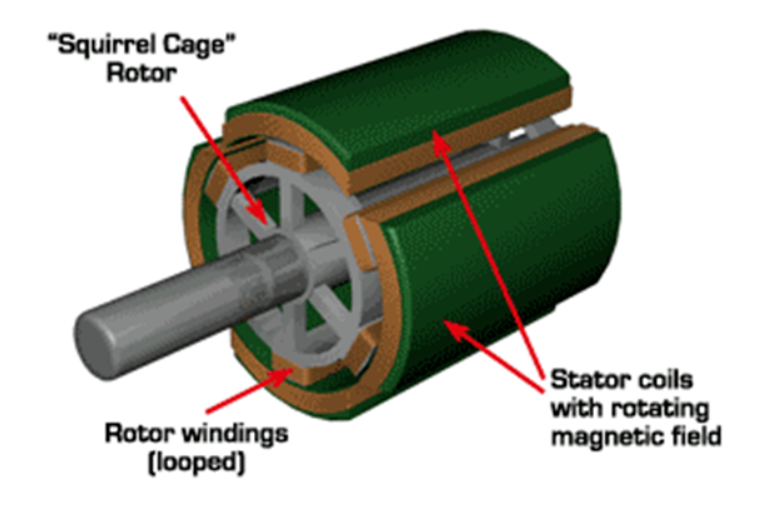
מנועי AC מחולקים למנועים סינכרוניים ולמנועים אסינכרוניים, מנועים סינכרוניים משמשים בעיקר בגנרטורים ומנועים אסינכרוניים משמשים בעיקר במנועים חשמליים. הם מנוע אינדוקציה לכלוב סנאי.
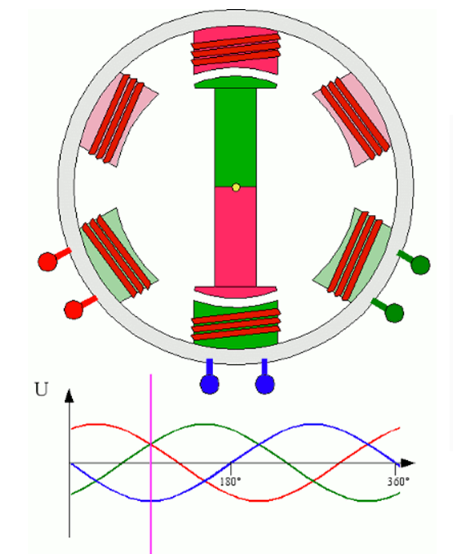
בית המנוע הוא הסטטור, ויש שלוש פיתולי AC סימטריים על הסטטור.
כאשר רצף שלושת השלבים משתנה, נוצר שדה מגנטי סינתטי מסתובב, ומהירות הסיבוב של השדה המגנטי היא המהירות הסינכרונית.
המהירות הסינכרונית n=60f/p, f היא התדר, p הוא מספר זוגות הקטבים, לדוגמה, עבור מנוע דו-קוטבי המחובר לרשת הלאומית 50Hz (כלומר, מספר זוגות הקטבים הוא זוג אחד), ואז המהירות n=60*50/1=3000r/min.
באופן דומה, המהירות הסינכרונית של מנועים עם 4 קוטבים, 6 קוטבים ו-8 קטבים היא 1500, 1000 ו-750.
למנועים אסינכרוניים יש מנגנון פשוט עם רוטור סליל סגור, כגון סוג כלוב סנאי.
סליל הרוטור יחתוך את השדה המגנטי המסתובב כדי ליצור את הפוטנציאל החשמלי המושרה, אשר בתורו יוצר את הזרם המושרה, ולבסוף את השדה המגנטי המסתובב.
כך שהרוטור יהפוך לאלקטרומגנט ויעקוב אחר סיבוב השדה המגנטי של הסטטור, אז מהירות הרוטור חייבת להיות < השדה המגנטי המסתובב של הסטטור, כדי לחתוך את קווי האינדוקציה המגנטיים.
The public number "Mechanical Engineering Digest", a refueling station for engineers!
כלומר, המהירות הא-סינכרונית של הרוטור <מהירות סינכרונית, יש הבדל מהירות בין הרוטור לשדה המגנטי של הסטטור, אז זה נקרא מנוע אסינכרוני.
המהירות המדורגת של מנוע אסינכרוני משתנה מעט מיצרן ליצרן, בערך 2800+r/min עבור מנוע 2 קוטבי, 1400+,950+,700+ עבור 4 קוטבים, 6 קוטבים ו-8 קוטבים אסינכרוניים.
המהירות של מנוע אסינכרוני גבוהה כאשר אין עומס, ויורדת כאשר יש עומס.
למנוע אסינכרוני יש מבנה פשוט, תחזוקה קלה, פעולה אמינה ומחיר זול, כך שהוא נמצא בשימוש נרחב.
4. מנועי AC תלת פאזיים - מנועים סינכרוניים
מנוע סינכרוני.
אם אתה נותן למהירות הרוטור = מהירות סיבוב השדה המגנטי של הסטטור, זה הופך למנוע סינכרוני, בשלב זה יש צורך להפוך את הסטטור לאלקטרומגנט או למגנט קבוע, כלומר להמריץ את הסטטור, בשלב זה אין צורך יותר כדי לחתוך את קו האינדוקציה המגנטי יכול להסתובב, מהירות הסיבוב ומהירות סיבוב השדה המגנטי זהה, כלומר, היווצרות של מנוע סינכרוני.
מבנה רוטור המנוע הסינכרוני מורכב יותר ממנועים אסינכרוניים, מחירים גבוהים, בחיי הייצור אינם בשימוש נרחב כמו מנועים אסינכרוניים, משמשים בעיקר כגנרטורים, כיום תחנות כוח תרמיות, תחנות כוח הידרואלקטריות, טורבינות קיטור, טורבינות הידראוליות הן בעצם מנועים סינכרוניים.
5. מנוע AC תלת פאזי - ויסות מהירות מנועים חשמליים אסינכרוניים
ויסות מהירות מנוע אסינכרוני: באופן תיאורטי, בקרת מנוע אסינכרוני תדר AC, מתח, או התנגדות הרוטור, חלוקת מוט המנוע יכול להיות ויסות מהירות, אבל בפועל כדי להשיג ויסות מהירות אינסופי עם השיטה של התאמת התדר והמתח להשיג.
בגלל טווח מהירות ויסות המתח אינו גדול, בדרך כלל ניתן להשתמש רק בדרישות בקרת מהירות. אין מקרים גבוהים, היישום אינו נפוץ.
ויסות מהירות תדר משתנה: אם כבר מדברים על תדר, אולי שמענו על זה.
השם המלא של המרת התדר הוא Variable Voltage Variable Frequency (VVVF), כלומר המתח משתנה כאשר התדר משתנה, כך שטווח המהירות של המנוע האסינכרוני גדול מספיק.
ניתן לחלק ממירי תדר לשתי קטגוריות רחבות: ממירי תדר AC-AC וממירי תדר AC-DC.
מהפך AC-DC: מתח AC הופך ישירות להספק AC של תדר אחר על ידי אלקטרוניקה.
תדר המוצא המקסימלי אינו יכול לעלות על מחצית מתדר הכניסה, ולכן הוא משמש בדרך כלל רק במערכות מהירות נמוכה, קיבולת גבוהה, ויכול לבטל את הצורך במפחית הילוכים ענק.
מהפך AC-DC יתקן את מתח ה-AC ל-DC תחילה, ולאחר מכן יהפוך אותו ל-AC עם תדר ומתח ניתנים לשליטה באמצעות מהפך, עם טכנולוגיית PWM, מהפך מסוג זה יכול לממש מגוון רחב של מתח ותדר משתנים.
עבור כלי רכב חשמליים, המנוע האסינכרוני הוא עמיד, יכולת עומס יתר חזקה, ואלגוריתם הבקרה כל כך בוגר שניתן להשתמש בו לחלוטין.
6. מנוע AC תלת פאזי - ויסות מהירות של מנוע סינכרוני
ויסות מהירות מנוע סינכרוני:
למכונות סינכרוניות אין קצב ירידה, ומתח הבקרה אינו יכול לשנות את המהירות כאשר המבנה נקבע, כך שלפני הופעת ממירי תדר, מנועים סינכרוניים לא היו מוסדרים לחלוטין.
המראה של ממיר התדר גורם למנוע AC סינכרוני גם בעל טווח ויסות מהירות עצום, מכיוון שלרוטור שלו יש גם עירור עצמאי (מגנט קבוע או עירור חשמלי), טווח ויסות המהירות שלו רחב יותר מזה של המנוע האסינכרוני, ולמנוע הסינכרוני יש קיבלו חיים חדשים.
ניתן לחלק מערכת בקרת מהירות משתנה של מנוע סינכרוני במתח משתנה בתדר משתנה לבקרת מהירות משתנה בשליטה אחרת ובקרת מהירות משתנה בשליטה עצמית.
עבור ויסות מהירות תדר משתנה מבוקר אחר, זה דומה לוויסות התדר המשתנה של מנוע אסינכרוני, שניתן לשלוט על ידי SVPWM ושיטות בקרה אחרות בהתאם למודל המתמטי שלו, והביצועים שלו טובים יותר משל מנוע אסינכרוני AC רגיל.
מנוע סינכרוני מהפך בשליטה עצמית היה בעל מגוון שמות בתהליך הפיתוח, כגון מנוע ללא commutator; בעת שימוש במגנטים קבועים והזנת גל סינוס תלת פאזי, זה יכול להיקרא מנוע סינכרוני של מגנט קבוע בגל סינוס; ואם מכניסים גל ריבועי, אז זה יכול להיקרא מנוע סינכרוני מגנט קבוע של גל טרפז, כן, זה דומה למכונת DC ללא מברשות (BLDM), אנחנו לא מרגישים שמעגל גדול של ראפ הפך חזור אחורה, אבל אתה חייב כעת להיות בעל הבנה מעמיקה יותר של מהירות משתנה, אז מנוע DC ללא מברשות בעת שימוש בקלט DC, אך השימוש בטכנולוגיית המרת תדר מנוע סינכרוני (אותו מבנה כמו המנוע הסינכרוני של מגנט קבוע), בדגם 3 על שימוש במנוע ללא מברשות DC .
7. מנוע AC חד-פאזי אסינכרוני - מנוע מתרגש מסדרת AC חד-פאזי (מברשת)
מנוע מתרגש מסדרת AC חד-פאזי, הידוע בדרך כלל כמנוע מעורר סדרה או מנוע אוניברסלי (שם לועזי UniversalMotor, שמו של AC ו-DC אוניברסלי), מתפתל האבזור ופיתול העירור מחוברים בסדרה כדי לעבוד יחד.
מנוע סידרתי חד-פאזי נקרא גם AC-DC דו-שימוש מנוע סדרתי נרגש, שיכול לעבוד עם מתח AC או מתח DC.
The public number "Mechanical Engineering Literature", the refueling station for engineers!
היתרונות של מנוע חד-פאזי מתרגש הם שיש לו מהירות גבוהה, מומנט התנעה גבוה, גודל קטן, משקל קל, לא קל לחסום סיבוב, טווח רחב של מתח ישים, וניתן לווסת את המהירות בשיטת ויסות המתח. , שהוא פשוט וקל למימוש.
לכן, הוא נמצא בשימוש נרחב בכלים חשמליים, כגון מטחנת זווית, מקדחה ידנית וכו '.
המבנה של מנוע מעורר סדרה חד-פאזי דומה מאוד לזה של מנוע מעורר סדרת DC, ההבדל העיקרי הוא שליבת הסטטור של מנוע מעורר סדרה חד-פאזי חייבת להיות עשויה מפלדת סיליקון למינציה, בעוד שהקטבים המגנטיים של DC יכול להיות עשוי גם ממבנה למינציה וגם ממבנה אינטגרלי.
ויסות מהירות מנוע מעורר סדרה חד פאזי, רוב השיטות המשמשות להתאמת המתח, היא שינוי הפוטנציאל החשמלי.
שיטת ויסות המתח של מנוע חד-פאזי מעורר סדרה משתמשת בוויסות מתח הסטת פאזה מבוקרת, המשתמשת במתח ההדק של ה-SCR כדי לפגר אחרי מתח הכניסה כדי להשיג את ההדק של הסטת הפאזה של מתח הכניסה.
ישנן שיטות חומרה ותוכנה ביישום.
לשיטת המתח המוסדר, תוך שימוש בטכנולוגיית בקרת מהירות מבוקרת סיליקון, יש קו פשוט, גודל קטן של רכיבים ומאפיינים נוספים של שיטה פשוטה ויעילה מבוקרת סיליקון
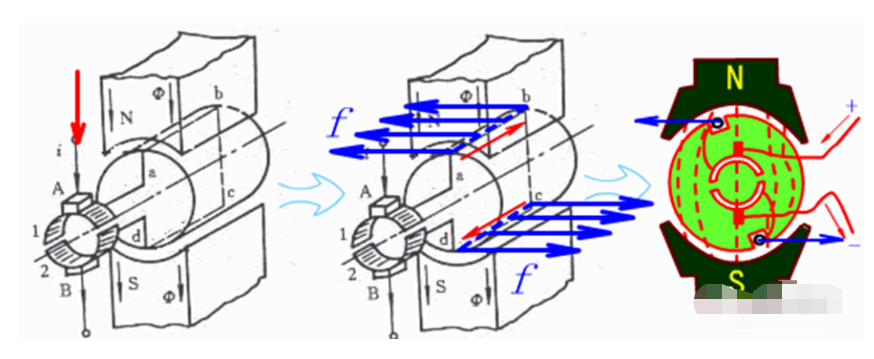
(א) עקומת שינוי זרם AC;
(ב) כיוון הסיבוב של הרוטור כאשר הזרם הוא חצי גל חיובי
(ג) כיוון הסיבוב של הרוטור כאשר הזרם הוא חצי גל שלילי

8. מנוע AC חד פאזי אסינכרוני - מנוע AC חד פאזי כלוב סנאי AC (ללא מברשות)
זרם חד פאזי דרך פיתול האבזור מייצר שדה מגנטי פועם ולא שדה מגנטי מסתובב, כך שלא ניתן להפעיל מנועים אסינכרוניים חד פאזיים.
כדי לפתור את בעיית ההתנעה, מנועים אסינכרוניים חד-פאזיים המופעלים על-ידי AC עשויים לרוב להיות דו-פאזיים.
הפיתול הראשי מופעל ישירות על ידי ספק הכוח החד פאזי; הפיתול המשני שונה מבחינה מרחבית מהפיתול הראשי ב-90° (זווית חשמלית, שווה לזווית המכנית חלקי מספר זוגות עמודי המנוע).
הפיתול המשני מחובר לספק כוח AC חד פאזי לאחר חיבור סדרתי של קבל או נגד, כך שלזרם העובר דרכו ולזרם בפיתול הראשי יש הפרש פאזה מסוים.
זה הופך את השדה המגנטי הסינטטי לשדה מסתובב אליפטי, או אולי אפילו קרוב לשדה סיבוב מעגלי.
המנוע משיג כך מומנט התנעה.
המנוע המשתמש בשיטת הפרדת פאזות התנגדות הוא זול, למשל, ניתן לפתול את הפיתול המשני עם חוט דק יותר, אך אפקט הפרדת הפאזות גרוע ואנרגיה נצרכת בהתנגדות.
לאחר שהמנוע מתחיל ומגיע למהירות מסוימת, הפיתול המשני מוסר בדרך כלל באופן אוטומטי על ידי מתג צנטריפוגלי המותקן על ציר המנוע כדי להפחית את הפסדי ההתנגדות ולשפר את יעילות הפעולה.
הוא משמש בדרך כלל לאירוע שדרישת מומנט ההתחלה אינה גבוהה, כגון מחרטה קטנה, מקרר קטן וכו'. החיסרון הוא שלא ניתן לכוונן את המהירות.
אפשר להפוך את השדה המגנטי הסינטטי של המנוע קרוב לשדה המגנטי המסתובב המעגלי בנקודת עבודה מסוימת של המנוע, כדי לקבל מאפייני עבודה טובים יותר.
על מנת לגרום למנוע האסינכרוני המפוצל להשיג ביצועי התנעה טובים יותר או מאפייני פעולה טובים יותר או שניהם, הקיבול (כמות הערך) הנדרש שונה וניתן לחלקו לשלושה סוגים
9. מנועי צעד - מנועי צעד עם לולאה פתוחה
מנועי צעד (לולאה פתוחה) הם מנועים מבוקרים בלולאה פתוחה הממירים אותות פולסים חשמליים לתזוזות זוויתיות, ונמצאים בשימוש נרחב ביותר.
In the case of non-overload, the speed and stop position of the motor depends only on the frequency of the pulse signal and the number of pulses, and is not affected by changes in the load, when the stepper driver receives a pulse signal, it drives the stepper motor to rotate a fixed angle, called the "step angle", its rotation is to run at a fixed angle step by step. The rotation is run step by step at a fixed angle.
ניתן לשלוט במספר הפולסים כדי לשלוט בכמות התזוזה הזווית, כדי להשיג את המטרה של מיקום מדויק; במקביל, ניתן לשלוט בתדר הדופק כדי לשלוט במהירות ובהאצה של סיבוב המנוע, כדי להשיג את מטרת ויסות המהירות.
מנוע צעדים הוא סוג של מנוע אינדוקציה, הפועל באמצעות מעגל אלקטרוני, כלומר דרייבר, כדי להפוך את הספק DC לזרם בקרת תזמון רב-פאזי המופעל בשיתוף זמן.
למרות שמנועי צעד מופעלים על ידי זרם DC, לא ניתן להבין אותם כמנועי DC, שהם מנועי כוח הממירים אנרגיה חשמלית DC לאנרגיה מכנית, בעוד שמנועי צעד הם מנועי בקרה בלולאה פתוחה הממירים אותות פולסים חשמליים לתזוזה זוויתית.
10. מנוע צעד - השוואת סרוו צעדים
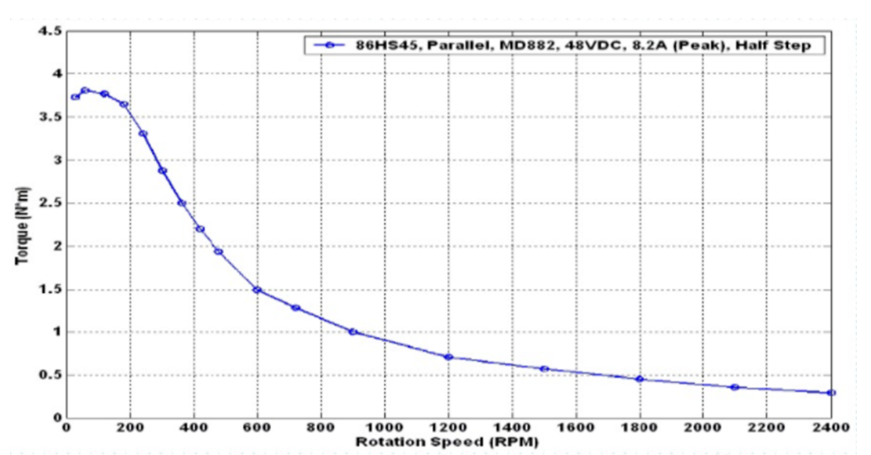
שים לב שמנועי צעד משמשים ביישומים במהירות נמוכה - לא יותר מ-1000r/min לדקה, טווח העבודה הטוב ביותר הוא 150~500r/min, (עלייה בלולאה סגורה עד 1500).
מנוע צעד דו-פאזי בקצב של 60 ~ 70 r/min נוטה לתופעת תהודה במהירות נמוכה, יוצר רטט ורעש, שיש להימנע מהם על ידי שינוי יחס ההפחתה, הגדלת השבר העדין, הוספת בולמים מגנטיים וכו'.
אמצעי זהירות לדיוק המשנה, כאשר רמת החלוקה גדולה מ-4, לא ניתן להבטיח את הדיוק של זווית הצעד, דרישות דיוק גבוהות, עדיף לעבור ליותר שלבים (כלומר, זווית צעד קטנה יותר) של מנוע הצעד או סגור- סטפר לולאה, מנוע סרוו.
(לולאה פתוחה) מנוע צעד ומנוע סרוו 7 שונים.
דיוק בקרה - ניתן להגדיר דיוק בקרת מנוע סרוו בהתאם למקודד, דיוק גבוה יותר.
B מאפיינים בתדר נמוך - מנועי צעד נוטים לרטט בתדרים נמוכים, מנועי סרוו לא.
מאפייני מומנט-תדר C - מומנט מנוע צעד קטן יותר עם העלייה במהירות, כך שמהירות הפעולה המרבית שלו היא בדרך כלל ב <1000r/min, מנוע סרוו במהירות מדורג (בדרך כלל 3000r/min) יכול להפיק את המומנט המדורג, במהירות המדורגת מעל פלט הכוח הקבוע, המהירות המרבית של עד 5000 r/min;.
קיבולת עומס D - לא ניתן להעמיס על מנוע צעדים, ניתן להעמיס מומנט מרבי מנוע סרוו פי 3.
ביצועי תפעול E - מנוע צעד לבקרת לולאה פתוחה, מנוע סרוו בעת שליטה בלולאה סגורה.
תגובת מהירות F - זמן התנעה של מנוע צעד 0.15 ~ 0.5 שניות, מנוע סרוו 0.05 ~ 0.1, ה-0.01 שניות המהירה ביותר להגיע ל-3000 ר/דקה.
מחווני יעילות G - יעילות מנוע צעד של כ-60%, מנוע סרוו כ-80%.
בשימוש בפועל ימצא: מנוע סרוו יקר, יקר מתוך רבים, ולכן מנועים סינכרוניים נמצאים בשימוש נרחב יותר, במיוחד בדרישות דיוק המיקום אינן גבוהות מאוד הנעה רצועה סינכרונית, מסוע רצועה שטוחה ואירועים אחרים לעתים קרובות להשתמש במנוע צעד.
11. מנועי צעד - מנועי צעד בלולאה סגורה
מנועי צעד בלולאה סגורה: בנוסף למנועי צעד בלולאה פתוחה, ישנם מנועי צעד שנוסף לקצה המנוע מקודד המאפשר שליטה בלולאה סגורה.
בקרת לולאה סגורה של מנועי צעד משתמשת במשוב מיקום ו/או משוב מהירות כדי לקבוע מעברי פאזה המתאימים למיקום הרוטור, מה שיכול לשפר מאוד את הביצועים של מנועי צעד.
מערכות סרוו ללא תופעות חריגות.
היתרונות של מנועי צעד בלולאה סגורה.
1. תגובה במהירות גבוהה. בהשוואה למנועי חליפה, לסטפר לולאה סגורה יש מעקב חזק מאוד של פקודות מיקום, כך שזמן המיקום קצר מאוד. ביישום של התחלה/עצירה תכופה, ניתן לקצר משמעותית את זמן המיקום.
2. צור יותר מומנט מאשר סרוו רגיל. פיצוי על היעדר אובדן צעדים ורטט במהירות נמוכה של מערכת צעדים רגילה.
3. מומנט גבוה יכול להיווצר גם תחת עומס של 100%, ללא אובדן פעולת צעד, מבלי לקחת בחשבון אובדן מומנט ובעיות אחרות כמו מערכות דריכה רגילות.
4. על ידי הפעלת הכונן בלולאה סגורה, ניתן להגדיל את היעילות לפי 7.8, להגדיל את הספק המוצא לפי 3.3 ולהגדיל את המהירות לפי 3.6.
זה יכול לקבל מהירות ריצה גבוהה יותר, מהירות יציבה וחלקה יותר מאשר בקרת לולאה פתוחה.
5. מנוע הצעד יהיה נייח לחלוטין כשהוא עוצר, ללא תופעת המיקרו-רעידות של סרוו רגיל.
זה יכול להחליף את היישום של מערכת סרוו לשימוש כללי כאשר נדרש עלות נמוכה ומיקום דיוק גבוה.
12. מנוע צעד - השוואת סרוו לולאה סגורה צעד
מנועי צעד בלולאה סגורה מכוונים אוטומטית את גודל זרם המתפתל בהתאם לגודל העומס, החום והרעידות פחותים משלב לולאה פתוחה, יש משוב מקודד כך שהדיוק גבוה יותר מאשר מנועי צעד רגילים, תגובת המנוע מאשר לולאה פתוחה צעד איטי יותר ממנועי סרוו מהר יותר, יש שגיאת מיקום במהלך הפעולה, השגיאה תקטן בהדרגה באלפיות שניות לאחר הפסקת הפקודה.
מומנט מהיר משלב לולאה פתוחה, יישומים נפוצים באירוע של 0-1500 סל"ד.
לסיכום: מנוע צעד בלולאה סגורה בעלות נמוכה, יעילות גבוהה, ללא ריצוד, ללא עצירה מיקרו-רעידות, קשיחות גבוהה, ללא תיקון, מהירות גבוהה, תגובה דינמית גבוהה וכו', מהווה החלפה של מערכות סרוו בעלות גבוהה, מערכות סטפר בלולאה פתוחה נמוכה ופתרונות חסכוניים אחרים
13. מנוע סרוו - מנוע סרוו כללי
מנוע סרוו (מנוע סרוו), הנקרא גם מנוע מפעיל, יכול להפוך את מהירות הבקרה, דיוק המיקום למדויק מאוד, יכול להמיר את אות המתח למומנט ולמהירות כדי להניע את אובייקט הבקרה.
שלא כמו המבנה העקרוני של מנוע צעד, מנוע סרוו הוא מנוע DC סטנדרטי או מנוע אינדוקציה AC מכיוון שמעגל הבקרה ממוקם מחוץ למנוע, וחלק המנוע בפנים.
מנוע הסרוו מסתמך על פולסים לצורך מיקום. כאשר מנוע הסרוו מקבל פעימה אחת, הוא מסתובב בזווית המקבילה לפולס אחד.
בכל פעם שהמנוע מסתובב בזווית, המקודד ישלח את המספר המתאים של פולסי משוב. פעימות המשוב והפולסים המתקבלים על ידי נהג הסרוו יוצרים בקרת לולאה סגורה, כך שנהג הסרוו יכול לשלוט בסיבוב המנוע בצורה מדויקת מאוד כדי להשיג מיקום מדויק.
בקרת מנועי סרוו: בדרך כלל, מנועי סרוו לשימוש תעשייתי נשלטים על ידי שלוש לולאות, כלומר לולאת זרם, לולאת מהירות ולולאת מיקום, שיכולות להחזיר את התאוצה הזוויתית, המהירות הזוויתית ומיקום הסיבוב של פעולת המנוע בהתאמה.
השבב שולט בזרם ההנעה של כל שלב של המנוע באמצעות המשוב של השלושה, כך שהמהירות והמיקום של המנוע יכולים לפעול במדויק כמתוכנן.
לסרוו AC יש תכונה של מומנט קבוע תחת מהירות מדורגת, 200W, 400W אינרציה נמוכה ובינונית של אינרציה AC סרוו מהירות מדורגת היא 3000 סל"ד, המהירות הגבוהה ביותר היא 5000 סל"ד, מהירות גבוהה.
המומנט הוא פרופורציונלי לזרם, כך שהוא יכול לעבוד במצב מומנט, כגון נעילת ברגים, חיבורי לחיצה ואירועים אחרים שצריכים מומנט קבוע.
רעש עבודה ורטט של סרוו AC הם קטנים מאוד, ייצור חום נמוך.
אותו נפח של אינרציית רוטור מנוע קטן, אינרצית סרוו של 400W שווה רק לאינרציה הרוטור של מנוע צעד 57 בסיסים 2NM.
לסרוו קיבולת עומס יתר בזמן קצר, הבחירה צריכה לקחת בחשבון את מכפיל עומס המנוע בעת האצה והאטה.
הסרוו משתמש בבקרת לולאה סגורה ויש לו אותה שגיאת מעקב אחר מיקום כמו לסטפר בלולאה סגורה.
סרוו דורש הפעלה לפני השימוש.
המומנט המקורי של מנוע הצעד והסרוו אינו מספיק, לעתים קרובות צריך לעבוד עם המפחית, אתה יכול להשתמש בערכת ההפחתה או במפחית הפלנטרי.
6. מנוע סרוו - סרוו
סרוו הוא סוג של מנוע סרוו DC, המשמש לראשונה עבור דגמי מטוסים קטנים וכעת משמש למפרקי רובוטים קטנים.
מהניתוח המבני, סרוו מורכב ממנוע DC קטן, בתוספת חיישנים, שבבי בקרה ומערכות הילוכים הפחתה, המורכבים לתוך בית משולב.
הוא מסוגל לשלוט על זווית הסיבוב באמצעות אות כניסה (בדרך כלל אות PWM, אך גם אות דיגיטלי).
מכיוון שמדובר בגרסה פשוטה, בקרת שלוש הלולאות המקורית של מנוע הסרוו מפושטת ללולאה אחת, כלומר, רק לולאת המיקום מזוהה.
פתרון זול הוא פוטנציומטר, אשר מזוהה על ידי נגד, בעוד פתרון מתקדם ישתמש בחיישן Hall, או מקודד.
סרוו כללי הם זולים וקומפקטיים, אך יש להם דיוק נמוך מאוד ויכולת הרגעת מיקום גרועה, ויכולים לענות על צרכים נמוכים רבים.
עם הפריחה של רובוטים קטנים ברמת הצרכן בשנתיים האחרונות, סרוו קטנים וקלים הפכו ברגע לרכיבי המפרק המתאימים ביותר.
עם זאת, מפרקי רובוט דורשים ביצועים הרבה יותר גבוהים מאשר סרוו אוויר, וכמוצר מסחרי דורשים גם סרוו באיכות הרבה יותר גבוהה מנגני עשה זאת בעצמך.
מוזמנים לשתף אותנו במידע נוסף על מנועים חשמליים באזור ההערות!
כל שאלה לגבי מנוע חשמלי, אנא פנה אל המנוע החשמלי המקצועי יַצרָן ב חרסינה כדלהלן:

למנוע דונגצ'ון מגוון רחב של מנועים חשמליים המשמשים בתעשיות שונות כגון תחבורה, תשתיות ובנייה.
קבל תשובה מהירה.






