1. Le principe physique du fonctionnement du moteur électrique
1.1 Système d'équations de Maxwell
Le moteur électrique est un transducteur qui convertit en permanence l’énergie électromagnétique et l’énergie mécanique.
Lorsque l'énergie électrique est entrée, le moteur électrique peut produire en continu un couple et de l'énergie mécanique.
c'est-à-dire le moteur électrique ; à l'inverse, si une force externe pousse continuellement l'arbre du moteur électrique et introduit de l'énergie mécanique, le moteur électrique peut produire en continu une tension et de l'énergie électrique à partir de l'extrémité du fil en sens inverse, c'est-à-dire le générateur.
Historiquement, le transformateur statique était également considéré comme un moteur électrique, mais il a progressivement évolué pour désigner exclusivement les moteurs et générateurs électriques.
L’un des avantages des moteurs électriques est que leurs pertes sont relativement faibles, ce qui leur permet d’atteindre un rendement élevé.
Les gros moteurs électriques peuvent atteindre des rendements allant jusqu'à 99 %.
Lorsqu'on parle de systèmes électromagnétiques, le système d'équations de Maxwell est inévitable.
Dans le monde macroscopique et même dans le monde microscopique,
Le système d'équations de Maxwell peut être utilisé très efficacement pour décrire les propriétés du système.
Le système d'équations de Maxwell a été résumé à partir d'études antérieures sur les phénomènes électromagnétiques.
Il existe quatre équations très fondamentales, à la fois sous forme différentielle et intégrale.
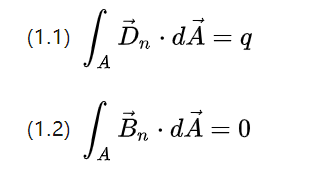
Examinons maintenant le système d'équations de Maxwell sous forme intégrale.
Les deux équations ci-dessus décrivent respectivement le flux de la densité de champ, le total de l'image de décalage du potentiel de sortie et le total de l'image d'induction du champ magnétique tournant dans une surface d'espace fermé.
Selon les connaissances acquises au lycée, le champ électrique peut être généré par une excitation de charge ponctuelle, le champ magnétique ne peut pas être excité par le monopôle magnétique, mais pour prolonger le chemin fermé, le champ électrique est donc actif, le champ magnétique est passif.
Ainsi, le flux de déplacement de potentiel total est la charge totale q et le flux magnétique total est égal à 0.
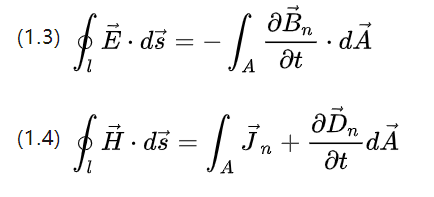
Les deux équations ci-dessus décrivent les quantités de spin de l'intensité du champ, les intégrales de l'intensité totale du champ électrique et l'intensité totale du champ magnétique.
Correspondant au taux de variation du flux magnétique et au taux de variation du décalage de potentiel (intensité du courant), respectivement, pour un tour le long du trajet de la courbe sur une courbe en espace fermé.
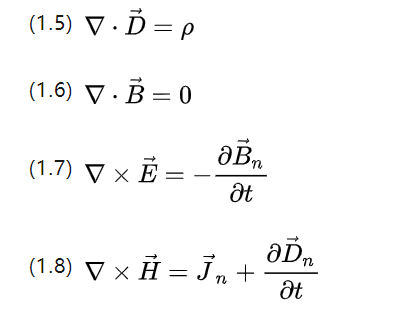
Les formules de Gauss et Stokes permettent également de réécrire les quatre équations ci-dessus sous forme différentielle comme suit.
▽ pour l'opérateur Nabla, avec un produit scalaire vectoriel pour calculer la diffusion et un produit de fourche pour calculer le spin, P pour la densité des corps de charge et Jn pour la densité de courant.
Les équations ci-dessus peuvent décrire essentiellement tout le comportement électromagnétique qui se produit dans tous les systèmes de moteurs à induction à courant alternatif.
1.2 Polarisation et magnétisation des matériaux pour l'énergie électrique
Dans un champ magnétique rotatif électrique appliqué, les molécules du matériau changeront d’orientation car la polarité est affectée par l’intensité du champ.
Les domaines électriques formés par les groupes moléculaires d'origine inégalement disposés et de différentes tailles seront polarisés en raison du champ magnétique appliqué et l'orientation de la distribution de charge converge.
E0=8,854187817*10-12F/m est la permittivité du vide, qui est également la constante diélectrique du vide, et P est la constante diélectrique relative, qui est déterminée par les propriétés du matériau lui-même.
(1.9) décrit ensemble la densité de déplacement potentiel du champ électrique appliqué et l’image d’intensité de polarisation correspondante.
Dans un champ magnétique appliqué, les domaines magnétiques et les forces de magnétisation correspondants peuvent être obtenus de la même manière.
Contrairement au champ électrique, une force de polarisation magnétique M est introduite, qui décrit la différence entre la force d'induction magnétique du matériau et celle de l'environnement sous vide.
U0=4π*10-7 N.A-2 est la perméabilité au vide et Ur est la perméabilité relative, qui décrit la capacité du matériau à laisser passer un champ magnétique.
Si tu es<=1 est antimagnétique, le matériau empêche le passage d'un champ magnétique ; si l'image est paramagnétique, le matériau se conforme au passage d'un champ magnétique.
Si tu es>= 1o 5 est ferromagnétique, le matériau tel que le nickel ferro-cobalt améliorera le champ magnétique après magnétisation. Et puis conserver une certaine force de champ magnétique après avoir supprimé le champ magnétique, appelé magnétisme rémanent.
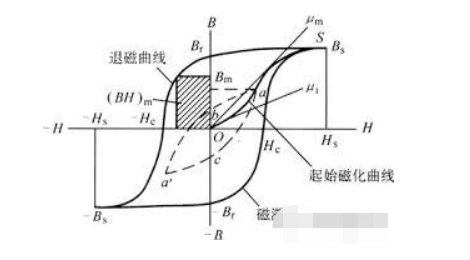
Au cours du fonctionnement du moteur, il y aura une magnétisation et une démagnétisation constantes, il convient donc également de prêter attention à l'examen des lignes d'hystérésis des différents matériaux.
La ligne d'hystérésis décrit l'induction magnétique croissante d'un matériau magnétique à mesure que l'intensité du champ augmente sous l'action d'un champ magnétique appliqué d'intensité H.
Cette induction magnétique ne suit pas l’intensité du champ après avoir atteint la saturation magnétique.
Une fois la saturation magnétique atteinte, il est difficile de suivre l’augmentation de l’intensité du champ. Lorsque l'intensité du champ magnétique externe diminue lentement jusqu'à zéro, on peut voir que la courbe de démagnétisation conserve toujours l'aimantation rémanente B lorsqu'elle passe le point zéro.
Cette aimantation rémanente montre le principe général de fabrication des aimants permanents, c'est-à-dire une aimantation directionnelle suivie d'une démagnétisation progressive. Lorsque le champ magnétique inverse est appliqué, la force d’induction magnétique devient nulle ou même augmente dans la direction opposée, et cet excès est appelé coercivité H.
1.3 Force électromagnétique et énergie mécanique
La plus grande valeur du moteur est de réaliser la conversion de l’énergie électrique en énergie mécanique, d’effectuer un travail externe et d’exécuter le mouvement cible.
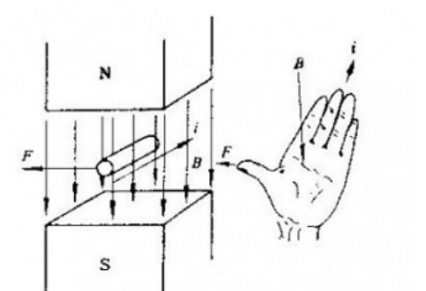
Le mouvement d'une particule chargée dans un champ magnétique est soumis à la force de Lorentz perpendiculaire à la direction du mouvement, dont l'expression macroscopique est la force Ampère Hm = Il * B , qui peut être jugée en utilisant la règle de gauche pour déterminer la direction,
I est la longueur efficace du conducteur dans le champ magnétique dans le sens du courant.
Il existe également une force de champ électrique correspondante dans le champ électrostatique Fe=qE .
Et les champs magnétiques et électriques sont eux-mêmes des champs, et la force appliquée à l'élément de charge ou de courant qu'ils contiennent dépend du volume et de la densité du champ, et ainsi la force de champ correspondante peut être examinée en termes de champ.
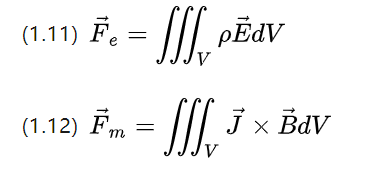
Les deux équations ci-dessus maintiennent toujours la symétrie, la densité de charge P dans un certain volume en raison de l'intensité du champ du champ électrique produit la densité de force électrique fe = pE,
La densité de courant J dans un certain volume en raison de l'intensité du champ magnétique produit la densité de force magnétique Fm = J * B (l'équation ci-dessus (1.12) doit être utilisée dans le cas de matériaux isotropes et de courant constant).
Cette expression nous incite à examiner directement l’énergie et la densité énergétique du champ électromagnétique.
De cette manière, l'énergie potentielle électromagnétique en un certain point peut être déterminée en trouvant le gradient pour obtenir la densité de force électromagnétique correspondante et ainsi trouver la force électromagnétique totale sur l'objet étudié.
1.4 Modèle de bobine
Une bobine est un élément fondamental qui forme un modèle de moteur à induction, reliant le modèle de circuit du moteur à courant alternatif et le modèle physique de l'objet.
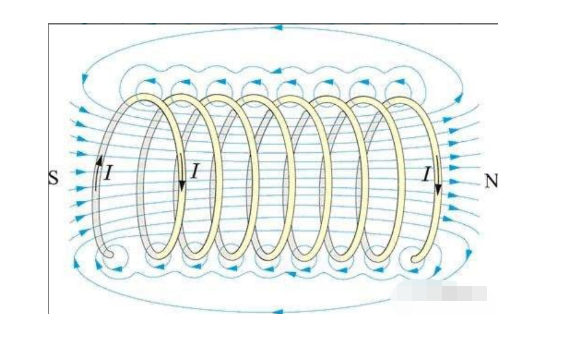
Une section droite d'un conducteur sous tension génère un champ magnétique toroïdal autour d'elle (selon l'équation 1.4).
Lorsque le conducteur est fermé au début et à la fin, le champ toroïdal forme des lignes de force magnétiques au centre de l'anneau conducteur qui traversent verticalement l'anneau conducteur, comme un solénoïde.
En considérant uniquement le courant sur le conducteur sous tension, (1.4) se simplifie en :
La force magnétomotrice (magnetische Durchfluchtung), qui est la source de l'intensité du champ d'excitation, est essentiellement l'intensité du courant total traversant une section de conducteur fermé dans [A].
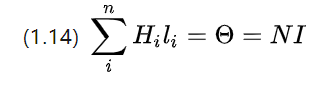
Puisqu’en pratique le fil sous tension sera enroulé en bobine, le courant du fil est discrétisé et (1.13) se réécrit sous la forme
N est le nombre total d'enroulements dans la bobine, c'est-à-dire le nombre de tours.
On peut voir que si le nombre de tours est plus élevé, le courant total est plus élevé, le potentiel magnétique est plus élevé et plus le champ magnétique peut être excité.
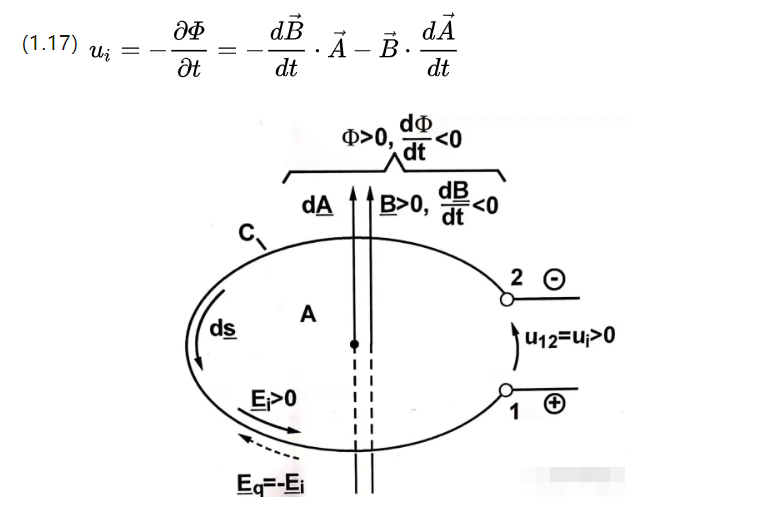
Une bobine monotour dans un champ magnétique variable dans le temps induira une tension aux deux extrémités du fil, phénomène décrit par (1.3).
On peut comprendre que l'induction magnétique peut également être interprétée comme la densité de flux magnétique, qui peut être obtenue en substituant (1.3)
Ui est le potentiel électrique induit, considérons deux formes de changement de flux, l'une consiste à changer la surface de la bobine mais à changer la densité de flux, alors il y a les éléments suivants ;
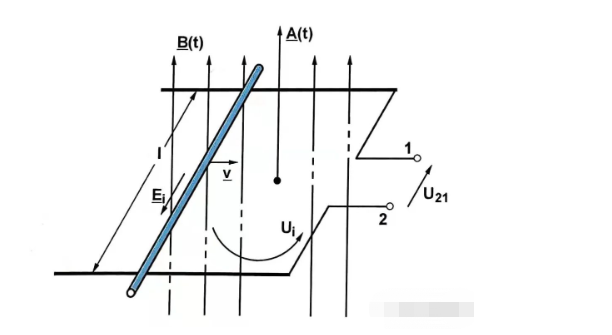
La première partie est le potentiel d'induction formellement transformé (tension induite par transformation) et la seconde partie est le potentiel d'induction transformé par translation (tension induite par translation).
Le premier a une densité de flux magnétique variable dans le temps, tandis que le second a une surface de bobine effective variable dans le temps.
Ce principe d'induction est mentionné dans les cours de physique au lycée et est également connu sous le nom de théorème de la flûte.
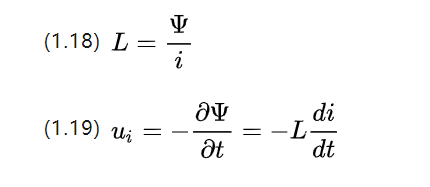
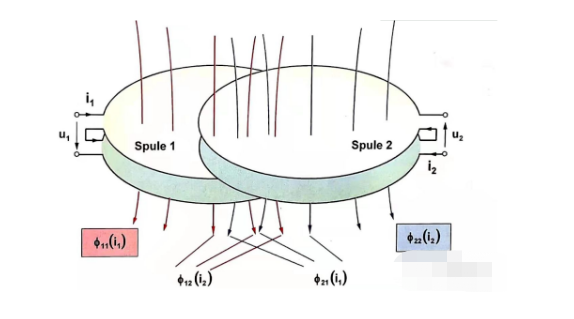
Lorsqu'une bobine comporte plusieurs spires, le flux effectif total est exactement un multiple entier des spires de la bobine déployée, introduisant ainsi le concept de chaîne magnétique.
La chaîne est définie dans la figure ci-dessous.
Notez que la chaîne magnétique est une quantité scalaire, tout comme le flux magnétique. Puisqu'un changement de courant lui-même peut également provoquer un changement de flux, la tendance est d'empêcher le changement de flux, ce qui peut être défini comme :
i est l'intensité variable du courant, L est le coefficient d'auto-inductance en Henry [H] et sa taille est liée à la forme du volume de la bobine, au nombre de spires et à la perméabilité magnétique.
Les bobines des moteurs à induction sont fabriquées avec un matériau ferromagnétique au milieu de la bobine, tel qu'un noyau de fer, afin d'augmenter la perméabilité magnétique, de sorte que la bobine soit enroulée sur le noyau de fer, d'où le nom d'enroulement.
Pour une section de matériau linéairement homogène, son coefficient d'auto-inductance peut être approximé par l'équation suivante
L'auto-inductance est une bobine de ses propres changements de courant pour induire le phénomène de tension de suppression, sa tendance à empêcher les changements de courant sur le moteur électrique à courant continu.
Lorsque deux bobines sont proches l'une de l'autre, en plus de leur propre auto-inductance, mais aussi en raison des bobines voisines sur les changements de courant et l'inductance mutuelle
Le coefficient d'inductance mutuelle des matériaux ayant des identités linéaires est approximé par l'équation ci-dessus, qui montre que l'inductance mutuelle est affectée par le nombre de tours des deux bobines en même temps.
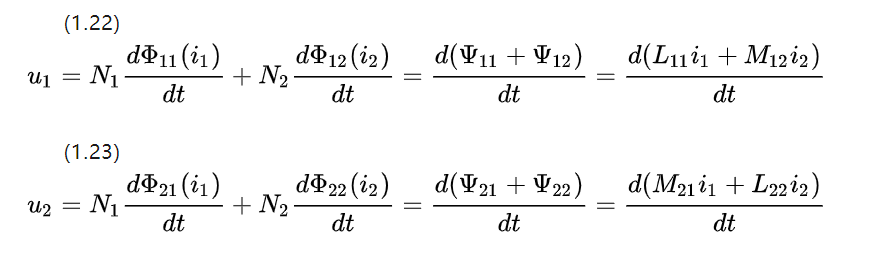
En ignorant la résistance et en examinant l'inductance propre et mutuelle des deux bobines adjacentes, l'équation de tension peut être répertoriée à partir de la figure 1.5 sur les moteurs à courant continu.
Étant donné que les pièces de couplage ont les mêmes paramètres de matériau et la même forme, les coefficients d'inductance mutuelle résultants sont égaux à M12 = M21.
Ainsi, la taille des chaînes de couplage sur chaque bobine est proportionnelle à l'intensité du courant sur la bobine d'enroulement du rotor correspondante pour le moteur à courant continu.
Théorème de 1,5 Ohm pour l'énergie électrique et les circuits magnétiques
Au lycée, nous avons étudié le théorème d'Ohm, qui stipule que la résistance d'un conducteur est le rapport entre la tension et le courant aux deux extrémités, et qu'il existe une formule pour décrire le matériau résistif lui-même.
Q, qui est la conductivité, qui est exactement l'inverse de la résistivité P et décrit la capacité à conduire le courant.
En plus d'appliquer une résistance, la relation entre la tension et le courant peut également être décrite à l'aide de l'image de conductivité lorsque le moteur électrique fonctionne.
Examinez maintenant l'intensité du courant par unité de surface, c'est-à-dire la densité de courant J = I/A e (e est le vecteur unitaire), avec la densité de courant comme vecteur pointant dans la direction du courant pour les moteurs à courant alternatif.
Ceci peut être combiné avec l'équation de tension U=E.l et (1.25) réécrit (1.26) comme
L'équation ci-dessus décrit le théorème d'Ohm au niveau microscopique, c'est-à-dire la variation de la densité de courant correspondant à une intensité de champ constante appliquée au conducteur.
Lm est la longueur effective du flux magnétique à travers une section du circuit magnétique et A est la zone de flux correspondante.
L'équation ci-dessus est très similaire à la formule de résistance.
Déformons à nouveau la formule de magnétorésistance et nous pourrons continuer à obtenir
On peut voir qu'en unités, la magnétorésistance est en fait l'inverse du coefficient d'inductance.
En poursuivant l'analogie avec la notion de conductance, on obtient la conductance magnétique A (magnetische Leitwert, en [H] ou [Ωs])
Dans le circuit, nous trouvons les éléments différentiels pour (1.26) et obtenons le théorème d'Ohm microscopique, alors quel est le théorème d'Ohm microscopique correspondant au circuit magnétique ?
Nous pouvons réécrire l’équation (1.31), en notant que le flux magnétique lui-même a une densité de flux B, ce qui donne alors
Ainsi, le théorème d'Ohm du circuit magnétique microscopique est l'équation (1.10), et l'intensité du champ magnétique ci-dessous est la densité de flux obtenue à partir de la magnétisation d'un champ magnétique constant.
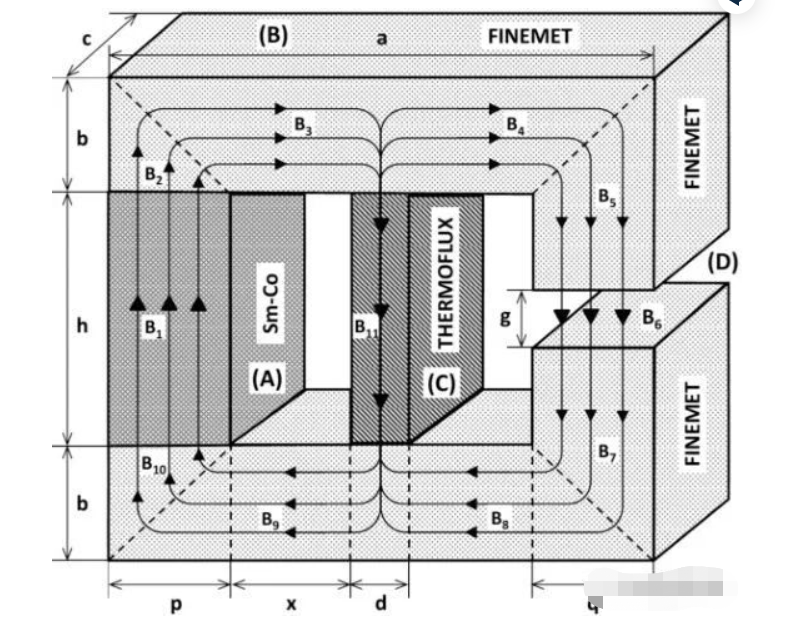
L'analyse informatique de la réluctance peut être utilisée pour réaliser une analyse micro-élémentaire du flux dans l'ensemble du pôle d'enroulement du moteur, de la partie centrale et de la partie entrefer intermédiaire, ce qui peut réaliser une analyse par éléments finis discrète FEM (Finite-Elemente-Methode) de l'ensemble du circuit magnétique.
Il est également possible d'appliquer le théorème de Kirchhoff au circuit magnétique, ce qui est très intuitif et pratique.
Bienvenue à partager avec nous plus d'informations sur les moteurs électriques dans la zone des commentaires !
Toute demande de renseignements sur le moteur électrique, veuillez contacter le moteur électrique professionnel fabricant dans Chine comme suit:
Dongchun motor propose une large gamme de moteurs électriques utilisés dans diverses industries telles que les transports, les infrastructures et la construction.
 Aller au contenu
Aller au contenu