Ein Elektromotor ist ein Gerät, das durch elektromagnetische Wirkung elektrische Energie in mechanische Energie umwandelt.
Nach der Form der elektrischen Energie können Motoren in zwei Kategorien eingeteilt werden: Wechselstrommotoren und Gleichstrommotoren.
Unter diesen können Wechselstrommotoren in einphasige Wechselstrommotoren und dreiphasige Wechselstrommotoren unterteilt werden. Entsprechend dem Drehzahlunterschied kann der Motor nach dem Klassifikationsprinzip auch in Synchronmotoren und Asynchronmotoren unterteilt werden.
Synchronmotoren können entsprechend den unterschiedlichen Magnetfeldern in Permanentmagnet-Synchronmotoren, Hysterese-Synchronmotoren und Reluktanz-Synchronmotoren unterteilt werden.
Asynchronmotoren hingegen gibt es nicht nur in Induktionsausführung, sondern auch in Wechselstrom-Kommutatorausführung.
Die Induktionsform kann in Drehstrom-Asynchronmotoren und Spaltpol-Asynchronmotoren unterteilt werden. Darüber hinaus kann der Motor je nach Schutzart auch in geschlossene, offene, wasserdichte, tauchfähige, wasserdichte und explosionsgeschützte Motoren unterteilt werden.
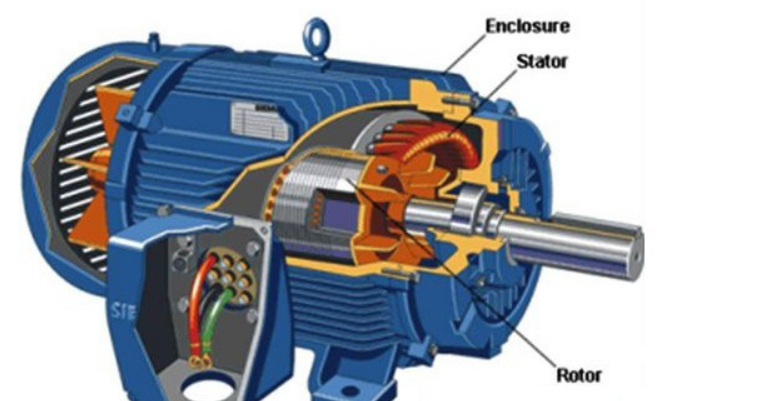
Der Elektromotor ist ein wichtiger Teil des Übertragungs- und Steuerungssystems, bei dem es sich um ein elektromagnetisches Gerät handelt, das die Umwandlung oder Übertragung elektrischer Energie gemäß dem Gesetz der elektromagnetischen Induktion realisiert. Die Hauptaufgabe besteht darin, ein Antriebsdrehmoment als elektrische Energiequelle zu erzeugen Geräte oder verschiedene Maschinen und wandeln elektrische Energie in mechanische Energie um.
Mit der Entwicklung moderner Wissenschaft und Technologie hat sich der Schwerpunkt von Motoren in der Praxis zunehmend von einfachen Getrieben in der Vergangenheit auf komplexe Steuerungen verlagert, insbesondere für die präzise Steuerung von Motorgeschwindigkeit, -position und -drehmoment.
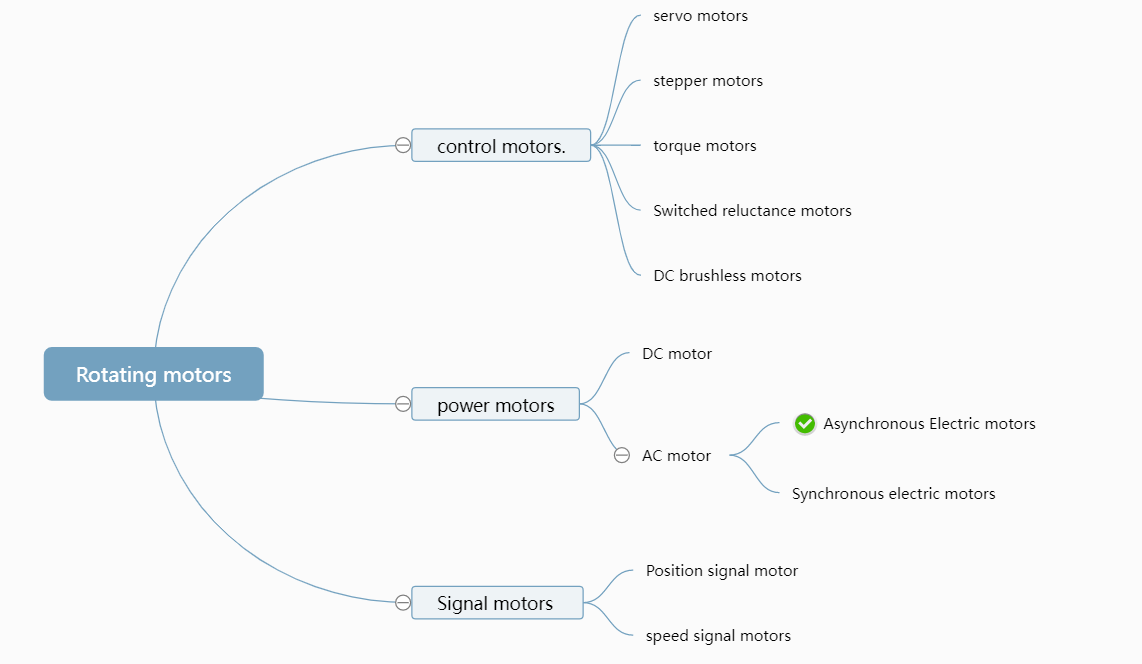
Motoren verfügen jedoch je nach Anwendung über unterschiedliche Konstruktionen und Antriebsmethoden. Entsprechend der Verwendung rotierender Motoren wird die folgende grundlegende Klassifizierung vorgenommen, und wir stellen hauptsächlich die repräsentativsten, gebräuchlichsten und grundlegendsten Motoren in Motoren vor – Steuermotoren, Leistungsmotoren und Signalmotoren.
Control motors are mainly used for precise speed and position control, and as "actuators" in control systems. They can be divided into servo motors, stepper motors, torque motors, switched reluctance motors, brushless DC motors and other categories.
Servomotor
Der früheste Servomotor ist ein allgemeiner Gleichstrommotor, und nur wenn die Steuerungsgenauigkeit nicht hoch ist, wird der allgemeine Gleichstrommotor als Servomotor verwendet. Der aktuelle Gleichstrom-Servomotor ist vom Aufbau her ein Gleichstrommotor mit kleiner Leistung, und seine Erregung erfolgt meist über Ankersteuerung und Magnetfeldsteuerung, in der Regel jedoch über Ankersteuerung.
Servomotoren werden häufig in verschiedenen Steuerungssystemen eingesetzt, hauptsächlich in verschiedenen Bewegungssteuerungssystemen, insbesondere in Follow-Me-Systemen. Es kann das Eingangsspannungssignal in den mechanischen Ausgang an der Motorwelle umwandeln und das gesteuerte Element ziehen, um den Steuerungszweck zu erreichen. Im Allgemeinen erfordert ein Servomotor, dass die Drehzahl des Motors durch das hinzugefügte Spannungssignal gesteuert wird. Die Geschwindigkeit kann sich kontinuierlich mit der Änderung des hinzugefügten Spannungssignals ändern, und das Drehmoment kann durch den Stromausgang des Controllers und des Motors gesteuert werden sollte schnell reflektieren, klein sein und eine geringe Kontrollleistung haben.
Schrittmotor
Der sogenannte Schrittmotor ist ein Aktuator, der elektrische Impulse in Winkelverschiebungen umwandelt. Das heißt, wenn der Schrittmotortreiber ein Impulssignal empfängt, treibt er den Schrittmotor so an, dass er sich um einen festen Winkel in die eingestellte Richtung dreht.
Wir können die Winkelverschiebung des Motors steuern, indem wir die Anzahl der Impulse steuern, um so den Zweck einer präzisen Positionierung zu erreichen.
Gleichzeitig können wir durch Steuerung der Impulsfrequenz auch die Geschwindigkeit und Beschleunigung der Motordrehung steuern, um so den Zweck der Geschwindigkeitsregulierung zu erreichen. Zu den derzeit am häufigsten verwendeten Schrittmotoren gehören reaktive Schrittmotoren (VR), Permanentmagnet-Schrittmotoren (PM), Hybrid-Schrittmotoren (HB) und einphasige Schrittmotoren.
Der Unterschied zwischen Schrittmotoren und gewöhnlichen Motoren liegt hauptsächlich in ihrer impulsgesteuerten Form, sodass Schrittmotoren mit moderner digitaler Steuerungstechnik kombiniert werden können und sich durch einfache Struktur, hohe Zuverlässigkeit und niedrige Kosten auszeichnen.
Aber Schrittmotoren sind hinsichtlich der Regelgenauigkeit, des Geschwindigkeitsänderungsbereichs und der Leistung bei niedrigen Geschwindigkeiten der herkömmlichen Regelung von Gleichstrom-Servomotoren unterlegen, sodass Schrittmotoren in der Produktionspraxis weit verbreitet sind und andere Präzisionsanforderungen in verschiedenen Bereichen nicht besonders hoch sind , insbesondere im Bereich des CNC-Werkzeugmaschinenbaus.
Und Schrittmotoren benötigen keine A/D-Wandlung, sondern können das digitale Impulssignal direkt in Winkelverschiebung umwandeln, weshalb sie als die idealsten Aktuatoren für CNC-Werkzeugmaschinen gelten.
Neben ihrer Anwendung in CNC-Werkzeugmaschinen können Schrittmotoren auch in anderen Maschinen eingesetzt werden, beispielsweise als Motoren in automatischen Zuführungen, Motoren in Allzweck-Diskettenlaufwerken sowie in Druckern und Plottern.
Darüber hinaus weist der Schrittmotor auch viele Mängel auf. Aufgrund der Startfrequenz des Schrittmotors ohne Last kann der Schrittmotor normal bei niedriger Geschwindigkeit laufen, wenn er jedoch höher als eine bestimmte Geschwindigkeit ist, kann er nicht starten und wird von einem scharfen Pfeifgeräusch begleitet. Die Genauigkeit der Unterteilungsantriebe verschiedener Hersteller kann stark variieren. Je größer die Unterteilungsgenauigkeit ist, desto schwieriger ist es, sie zu kontrollieren. Und die langsame Drehung eines Schrittmotors verursacht große Vibrationen und Geräusche.
Torquemotor
Der sogenannte Torquemotor ist ein flacher mehrpoliger Permanentmagnet-Gleichstrommotor.
Sein Anker verfügt über eine größere Anzahl von Schlitzen, Kommutierungsplatten und Reihenleitern, um Drehmomentpulsation und Drehzahlpulsation zu reduzieren. Es gibt zwei Arten von Torquemotoren: Gleichstrom-Torquemotoren und AC-Torquemotoren.
Unter anderem hat der Gleichstrom-Drehmomentmotor eine kleine selbstinduzierte Reaktanz, sodass die Reaktion gut ist. Sein Ausgangsdrehmoment ist proportional zum Eingangsstrom, unabhängig von Drehzahl und Position des Rotors. Es kann bei niedriger Drehzahl direkt mit der Last verbunden sein, ohne Untersetzungsgetriebe in einem nahezu blockierten Zustand, so dass es ein hohes Drehmoment-Trägheits-Verhältnis an der Welle der Last erzeugen und den systematischen Fehler aufgrund der Verwendung von Untersetzungsgetrieben eliminieren kann.
Wechselstrom-Torquemotoren können in Synchron- und Asynchronmotoren unterteilt werden. Der üblicherweise verwendete Strom ist der asynchrone Käfigläufer-Torquemotor, der die Eigenschaften einer niedrigen Drehzahl und eines großen Drehmoments aufweist. Generell werden in der Textilindustrie häufig AC-Torquemotoren eingesetzt. Ihr Funktionsprinzip und ihre Struktur entsprechen denen von Einphasen-Asynchronmotoren, ihre mechanischen Eigenschaften sind jedoch aufgrund des höheren Widerstands des Käfigläufers weicher.
Schaltender Reluktanzmotor
Der geschaltete Reluktanzmotor ist ein neuartiger Drehzahlregelmotor mit extrem einfacher und robuster Struktur, niedrigen Kosten und hervorragender Drehzahlregelleistung. Er ist ein starker Konkurrent des herkömmlichen Regelmotors und verfügt über ein starkes Marktpotenzial.
Es gibt jedoch auch Probleme wie Drehmomentpulsation, Betriebsgeräusche und Vibrationen, deren Optimierung und Verbesserung einige Zeit in Anspruch nimmt, um sie an die tatsächliche Marktanwendung anzupassen.
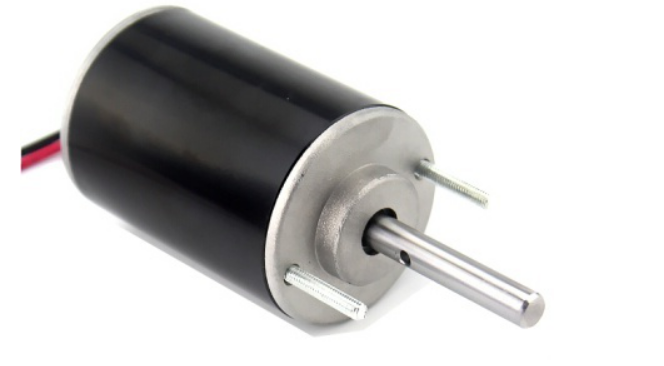
Bürstenloser Gleichstrommotor
Brushless DC motor (BLDCM) is developed on the basis of brushed DC motor, but its drive current is uncompromisingly AC. Brushless DC motors can be further divided into brushless rate motors and brushless torque motors. Generally, brushless motors have two types of drive currents, one is a trapezoidal wave (usually a "square wave") and the other is a sine wave. Sometimes the former is called a brushless DC motor and the latter is called an AC servo motor, which is also a kind of AC servo motor to be exact.
Brushless DC motors usually have a "slender" structure in order to reduce rotational inertia. Brushless DC motors are much smaller in weight and volume than brushed DC motors, and the corresponding rotational inertia can be reduced by about 40%-50%. Due to the processing problems of permanent magnet materials, the capacity of brushless DC motors is generally below 100kW.
Die mechanischen Eigenschaften und Regelungseigenschaften dieses Motors zeichnen sich durch eine gute Linearität, einen großen Drehzahlbereich, eine lange Lebensdauer, einfache Wartung und geringe Geräuschentwicklung aus, und es gibt keine Reihe von Problemen, die durch Bürsten verursacht werden, sodass dieser Motor ein großes Potenzial für die Anwendung in Steuerungssystemen hat.
Brushless DC motors are usually of "slender" construction to reduce the inertia.
Bürstenlose Gleichstrommotoren haben ein viel geringeres Gewicht und Volumen als bürstenbehaftete Gleichstrommotoren, und die entsprechende Rotationsträgheit kann um etwa 40–50 % reduziert werden. Aufgrund der Verarbeitungsprobleme von Permanentmagnetmaterialien liegt die Leistung bürstenloser Gleichstrommotoren im Allgemeinen unter 100 kW.
Die mechanischen Eigenschaften und Regelungseigenschaften dieses Motors zeichnen sich durch eine gute Linearität, einen großen Drehzahlbereich, eine lange Lebensdauer, einfache Wartung und geringe Geräuschentwicklung aus, und es gibt keine Reihe von Problemen, die durch Bürsten verursacht werden, sodass dieser Motor ein großes Potenzial für die Anwendung in Steuerungssystemen hat.
Leistungsmotor
Der Leistungsmotor wird in Gleichstrommotoren und Wechselstrommotoren unterteilt, und Wechselstrommotoren werden hauptsächlich in Synchronmotoren und Asynchronmotoren unterteilt.
Gleichspannungs Motor
Der Gleichstrommotor ist der früheste Motor, etwa Ende des 19. Jahrhunderts, der grob in zwei Kategorien mit Kommutator und ohne Kommutator unterteilt werden kann.
Gleichstrommotoren haben bessere Regeleigenschaften, sind jedoch in Struktur, Preis und Wartung nicht so gut wie Wechselstrommotoren.
Da das Problem der Drehzahlregelung des Wechselstrommotors jedoch noch nicht gut gelöst ist, bietet der Gleichstrommotor die Vorteile einer guten Drehzahlregelung, eines einfachen Starts und der Fähigkeit zum Starten mit Last.
Daher ist die Anwendung von Gleichstrommotoren immer noch sehr weit verbreitet, insbesondere nach dem Aufkommen der siliziumgesteuerten Gleichstromversorgung.
Anwendungsstatus: Im Leben gibt es unzählige Anwendungen für elektrische Produkte, wie z. B. Ventilatoren, Rasierer, automatische Türen in Hotels, automatische Türschlösser, automatische Vorhänge usw., die alle Gleichstrommotoren verwenden.
Gleichstrommotoren werden auch häufig in der Lokomotiventraktion eingesetzt, beispielsweise Gleichstrom-Fahrmotoren für Eisenbahnlokomotiven, Gleichstrom-Fahrmotoren für U-Bahn-Lokomotiven, Gleichstrom-Hilfsmotoren für Lokomotiven, Gleichstrom-Fahrmotoren für Bergbaulokomotiven, Gleichstrommotoren für Schiffe usw.
Sie werden auch häufig in Flugzeugen, Panzern, Radargeräten und anderen Waffen und Geräten eingesetzt. Das Bild zeigt den Gleichstrommotor der Z4-Serie.
AC Motor
Synchronmotor
Der sogenannte Synchronmotor ist ein mit Wechselstrom angetriebener Elektromotor, dessen rotierendes Magnetfeld Rotor und Stator synchron laufen.
The stator of synchronous motor is exactly the same as that of asynchronous motor, but there are two types of rotor: "convex pole" and "hidden pole".
Der Konvexrotor-Synchronmotor ist einfach und leicht herzustellen, aber die mechanische Festigkeit ist gering und er ist für den Betrieb bei niedriger Drehzahl geeignet.
Der versteckte Pol-Synchronmotor hat einen komplizierten Herstellungsprozess, weist jedoch eine hohe mechanische Festigkeit auf und ist für den Hochgeschwindigkeitsbetrieb geeignet.
The working characteristic of synchronous motor is the same as all motors, which is "reversible", that is, it can run in generator mode and motor mode.
Anwendungsstatus: Synchronmotoren werden hauptsächlich in großen Maschinen wie Gebläsen, Pumpen, Kugelmühlen, Kompressoren, Stahlwalzwerken, Klein- und Miniaturinstrumenten und -geräten oder als Steuerelemente eingesetzt, deren Hauptkörper Drehstrom-Synchronmotoren sind .
Darüber hinaus kann es auch als Regler zur Einspeisung von induktiver oder kapazitiver Blindleistung in das Netz eingesetzt werden.
Asynchronmotor
Der Asynchronmotor ist eine Art Wechselstrommotor, der auf der Wechselwirkung des rotierenden Luftspaltmagnetfelds und des Induktionsstroms der Rotorwicklung basiert, um ein elektromagnetisches Drehmoment zu erzeugen und eine Energieumwandlung zu realisieren.
Bei Asynchronmotoren handelt es sich im Allgemeinen um eine Reihe von Produkten mit einer Vielzahl von Spezifikationen. Unter allen Motoren ist er der am weitesten verbreitete und gefragteste.
Gegenwärtig verwenden etwa 90 % der Maschinen zur Kraftübertragung Wechselstrom-Asynchronmotoren, sodass ihr Stromverbrauch mehr als die Hälfte der gesamten elektrischen Last ausmacht.
Asynchronmotoren bieten die Vorteile eines einfachen Aufbaus, einer einfachen Herstellung, Verwendung und Wartung, eines zuverlässigen Betriebs sowie einer geringeren Masse und geringeren Kosten.
Darüber hinaus verfügt der Asynchronmotor über eine hohe Betriebseffizienz und gute Arbeitseigenschaften, vom Leerlauf- bis zum Volllastbereich nahe dem Betrieb mit konstanter Drehzahl, und kann die Getriebeanforderungen der meisten industriellen und landwirtschaftlichen Produktionsmaschinen erfüllen.
Asynchronmotoren werden häufig zum Antrieb von Werkzeugmaschinen, Pumpen, Gebläsen, Kompressoren, Hebe- und Fördergeräten, Bergbaumaschinen, Maschinen der Leichtindustrie, Land- und Nebenverarbeitungsmaschinen und den meisten industriellen und landwirtschaftlichen Produktionsmaschinen sowie Haushaltsgeräten und medizinischen Geräten eingesetzt.
Anwendungsstatus: Die gebräuchlichsten Asynchronmotoren sind einphasige Asynchronmotoren und dreiphasige Asynchronmotoren, von denen der dreiphasige Asynchronmotor den Hauptkörper des Asynchronmotors darstellt. Dreiphasen-Asynchronmotoren können zum Antrieb verschiedener Arten verwendet werden von Allzweckmaschinen wie Kompressoren, Pumpen, Brechern, Schneidmaschinen, Transportmaschinen und anderen mechanischen Geräten im Bergbau, im Maschinenbau, in der Metallurgie, in der Erdölindustrie, in der chemischen Industrie, in Kraftwerken und anderen Industrie- und Bergbauunternehmen als Antriebsmotor wird im Bergbau, im Maschinenbau, in der Metallurgie, in der Erdölindustrie, in der chemischen Industrie, in Kraftwerken und anderen Industrie- und Bergbauunternehmen eingesetzt.
Einphasige Asynchronmotoren werden im Allgemeinen an Orten verwendet, an denen eine dreiphasige Stromversorgung nicht praktisch ist. Dabei handelt es sich meist um Miniaturmotoren und Motoren mit geringer Leistung, die eher in Haushaltsgeräten wie elektrischen Ventilatoren, Kühlschränken, Klimaanlagen, Staubsaugern usw. eingesetzt werden.
Derzeit sind die repräsentativsten Positionssignalmotoren: Resolver, Induktionssynchronisator und selbsteinstellende Winkelmaschine.
(1) Drehtransformator
Der Rotationstransformator ist ein elektromagnetischer Sensor, der auch als Synchronzersetzer bezeichnet wird. Es handelt sich um einen kleinen Wechselstrommotor zur Winkelmessung, der zur Messung der Winkelverschiebung und Winkelgeschwindigkeit des rotierenden Objekts verwendet wird und aus einem Stator und einem Rotor besteht. Die Statorwicklung wird als Primärseite des Transformators zum Empfang der Erregerspannung verwendet, und die Erregerfrequenz beträgt normalerweise 400, 3000 und 5000 Hz usw. Die Rotorwicklung wird als Sekundärseite des Transformators zum Empfang der Erregerspannung verwendet . Die Rotorwicklung dient als Sekundärseite des Transformators, um durch elektromagnetische Kopplung die induzierte Spannung zu erhalten.
Anwendungsstatus: Der Resolver ist ein Präzisionsgerät zur Winkel-, Positions- und Geschwindigkeitserkennung, das für alle Drehtransformator-Resolver-Anwendungen mit Drehgeber geeignet ist, insbesondere für hohe Temperaturen, Kälte, Feuchtigkeit, hohe Geschwindigkeit, starke Vibrationen und andere Fälle, bei denen Drehgeber dies nicht können ordnungsgemäß funktionieren. Aufgrund der oben genannten Eigenschaften des Drehtransformators kann er den fotoelektrischen Encoder vollständig ersetzen und wird häufig in Winkel- und Positionserkennungssystemen in den Bereichen Servosteuerungssysteme, Robotersysteme, mechanische Werkzeuge, Automobil, elektrische Energie, Metallurgie und Textilien eingesetzt , Druck, Luft- und Raumfahrt, Schiff, Waffen, Elektronik, Metallurgie, Bergbau, Ölfeld, Wasserschutz, chemische Industrie, Leichtindustrie, Bauwesen usw. Es kann auch in der Koordinatentransformation, trigonometrischen Operation und Winkeldatenübertragung sowie in zweierlei Hinsicht verwendet werden -Phasenschieber im Winkel-Digital-Umwandlungsgerät.
Induktionssynchronisator
Der Induktionssynchronisator basiert auf dem Prinzip, dass die gegenseitige Induktivität zweier planarer Wicklungen mit der Position variiert, und kann zur Messung linearer oder winkeliger Verschiebungen verwendet werden. Unter diesen wird die Messung der linearen Verschiebung als linearer Induktionssynchronisator (oder langer Induktionssynchronisator) und die Messung der Winkelverschiebung als seitlicher Induktionssynchronisator (oder rotatorischer Induktionssynchronisator) bezeichnet. Synchronisatoren bieten die Vorteile einer hohen Präzision und Auflösung der Messaggregation, einer starken Entstörungsfähigkeit, eines geringen Einflusses durch die Umgebung, einer langen Lebensdauer, einer einfachen Wartung, können in verschiedene Messlängen gespleißt werden und können die Genauigkeit der Einheit beibehalten, gute Verarbeitbarkeit, niedrige Kosten, Einfaches Kopieren und Serienproduktion. Daher werden Synchronisierungen in großen Werkzeugmaschinen und mittelgroßen Maschinen häufig als digitale Verschiebung zur Bereitstellung von Anzeige- oder Steuergeräten eingesetzt.
Anwendungsstatus: Induktionssynchronisierer werden häufig zur Messung von linearen Verschiebungen, Winkelverschiebungen und damit verbundenen physikalischen Größen wie Drehzahl, Vibration usw. verwendet. Lineare Induktionssynchronisierer werden häufig in großen Präzisionswerkzeugmaschinen, Koordinatenfräsmaschinen und anderen CNC-Maschinen verwendet Werkzeugpositionierungssteuerung und Digitalanzeige; Der kreisförmige Induktionssynchronisator wird häufig verwendet, wenn eine feste Antennenverfolgung, eine sorgfältige Führung, Präzisionswerkzeugmaschinen oder Messgeräte und Indexierungsgeräte für Geräte usw. erforderlich sind.
selbsteinstellende Winkelmaschine
Eine selbstausrichtende Winkelmaschine ist die Verwendung von selbstausrichtenden Eigenschaften des Winkels in Wechselspannung oder von Wechselspannung in den Winkel des Induktionsmikromotors, in dem das Servosystem als Wegsensor zur Messung des Winkels verwendet wird. Selbstausrichtende Maschinen können auch zum Senden, Umwandeln, Empfangen und Anzeigen von Winkelsignalen über große Entfernungen eingesetzt werden. Zwei oder mehr Motoren sind durch Schaltkreise miteinander verbunden, sodass zwei oder mehr Rotationsachsen, die nicht mechanisch miteinander verbunden sind, automatisch die gleiche Winkeländerung beibehalten oder sich synchron drehen. Diese Eigenschaft des Motors wird als selbstintegrierende Schrittcharakteristik bezeichnet. Im Servosystem wird die auf der Erzeugungsseite verwendete selbstabstimmende Maschine als Sender und die auf der Empfangsseite verwendete selbstabstimmende Maschine als Empfänger bezeichnet.
Anwendungsstatus: Selbstausrichtende Winkelmaschinen werden häufig in der Metallurgie, Navigation und anderen Positions- und Orientierungssynchronisationsanzeigesystemen sowie in Artillerie-, Radar- und anderen Servosystemen eingesetzt.
Dies ist meine Zusammenfassung einiger Informationen über die Motorklasse. Wenn es Mängel oder falsche Platzierungen gibt, können Sie gerne einen Kommentar hinterlassen. Danke schön!
Wir sind ein professioneller Hersteller von Elektromotoren in China.
Wenn Sie Bedarf haben. Bitte lassen Sie es uns wissen!
Hallo, ich habe Ihren Artikel gelesen und Ihre Informationen sind sehr erstaunlich und sehr hilfreich für mich. Machen Sie weiter so und vielen Dank. 🙂 Mehr Infos unter https://tsca.com.ph/
 Zum Inhalt springen
Zum Inhalt springen 














2 Antworten
Hallo, ich habe Ihren Artikel gelesen und Ihre Informationen sind sehr erstaunlich und sehr hilfreich für mich. Machen Sie weiter so und vielen Dank. 🙂 Mehr Infos unter https://tsca.com.ph/
Danke für deine netten Kommentare!