 Zum Inhalt springen
Zum Inhalt springen 
Fast die Hälfte des weltweiten Stromverbrauchs wird von Elektromotoren verbraucht, daher gilt die hohe Effizienz von Elektromotoren als die wirksamste Maßnahme zur Lösung der weltweiten Energieprobleme.
Arten von Elektromotoren
Im Allgemeinen bezeichnet man damit die Umwandlung der durch den Stromfluss in einem Magnetfeld erzeugten Kraft in eine Drehwirkung, in einem weiten Bereich umfasst es auch eine lineare Wirkung.
Abhängig von der Art der Stromversorgung, die zum Antrieb des Motors verwendet wird, gibt es Gleichstrommotoren und AC-Elektromotoren.
Und nach dem Motorrotationsprinzip lässt es sich grob in die folgenden Kategorien einteilen. (Außer bei Sondermotoren)
DC-Elektromotor/DC-Motoren (Gleichstrom).
Bürstenmotoren
Die weit verbreiteten Bürstenmotoren werden allgemein als DC-Elektromotoren bezeichnet.
The electrodes connected to the "brush" (stator side) and the "commutator" (armature side)
The brushed motor is used to switch the current by making contact with the "commutator" (armature side) in turn to perform rotational action.
Bürstenloser Gleichstrommotor
Bürstenlose Gleichstrommotoren verwenden keine Bürsten oder Kommutatoren, sondern nutzen eine Schaltfunktion wie einen Transistor, um den Strom zu schalten und eine Drehbewegung auszuführen.
Schrittmotor.
Dieser Motor arbeitet synchron mit Impulsleistung und wird daher auch Impulsinduktionsmotor genannt.
Es zeichnet sich durch die Fähigkeit aus, auf einfache Weise eine genaue Positionierung zu erreichen.
Wechselstrommotoren
Asynchronmotor
Wechselstrom erzeugt im Stator ein rotierendes Magnetfeld, das wiederum im Rotor einen induzierten Strom erzeugt, in dessen Wechselwirkung eine Drehung des Wechselstrom-Induktionsmotors erfolgt.
Synchronmotor
Wechselstrom erzeugt ein rotierendes Magnetfeld und der Rotor mit den Magnetpolen dreht sich aufgrund der Anziehung.
-Die Drehzahl ist glücklicherweise mit der Frequenz der Stromversorgung synchronisiert.
Über Ströme, Magnetfelder und Kräfte
Zur weiteren Erläuterung des Motorprinzips werfen wir zunächst einen Blick auf die Grundgesetze bezüglich Strom, Magnetfeld und Kraft.
Obwohl ein Gefühl der Nostalgie aufkommt, vergisst man dieses Wissen leicht, wenn man normalerweise keine magnetischen Komponenten verwendet
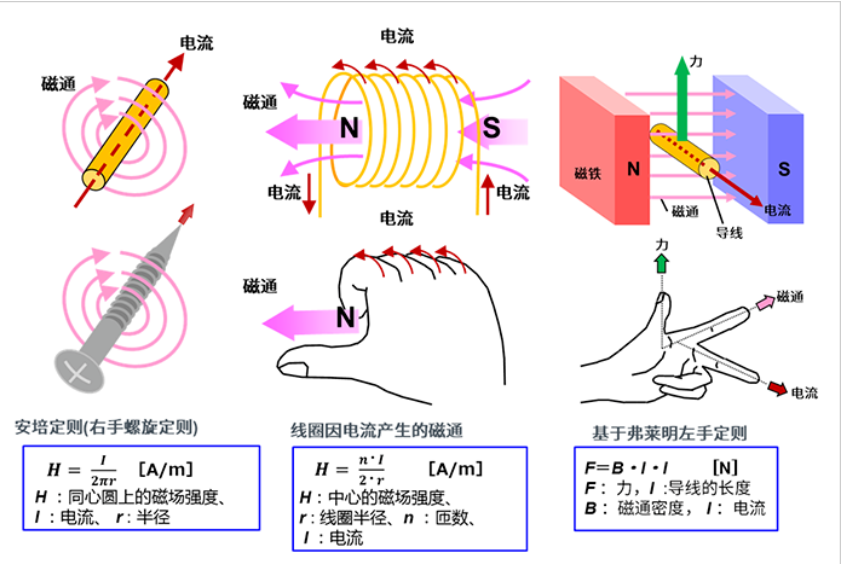
Zur Veranschaulichung kombinieren wir Bilder und Formeln.
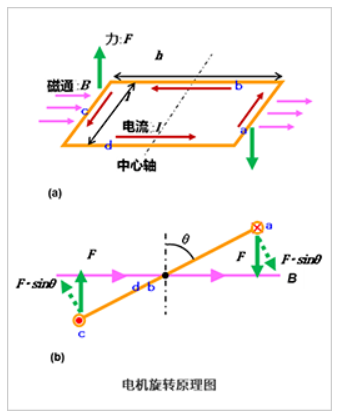
Wenn der Drahtrahmen rechteckig ist, wird die auf den Strom wirkende Kraft berücksichtigt.
Die auf die Teile der Seiten a und c wirkende Kraft F beträgt
Das Drehmoment wird mit der Mittelachse als Mittelachse erzeugt.
Betrachtet man beispielsweise einen Zustand, in dem der Drehwinkel nur θ beträgt, ist die im rechten Winkel zu b und d wirkende Kraft sinθ, sodass das Drehmoment Ta des a-Teils wie folgt gegeben ist:
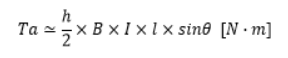
Betrachtet man Teil c auf die gleiche Weise, verdoppelt sich das Drehmoment und erzeugt das durch die folgende Gleichung berechnete Drehmoment

Da die Fläche des Rechtecks S = h・l ist, ergibt das Einsetzen in die obige Gleichung das folgende Ergebnis.

Die Formel gilt nicht nur für Rechtecke, sondern auch für andere gängige Formen wie Kreise. Der Motor macht sich dieses Prinzip zunutze.
Wie dreht sich ein Elektromotor?
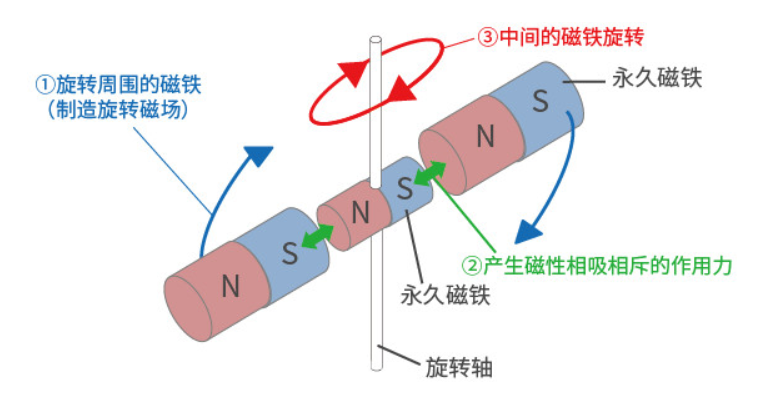
1) Die Induktionsmotoren drehen sich mit Hilfe von Magneten und magnetischer Kraft
Um einen Permanentmagneten mit rotierender Welle,
① der Magnet wird gedreht (so dass ein rotierendes Magnetfeld entsteht),
② dann nach dem Prinzip, dass sich N- und S-Pole an unterschiedlichen Polen gegenseitig anziehen und sich auf gleicher Höhe abstoßen,
③ Der Magnet mit rotierender Welle dreht sich.
Dies ist das Grundprinzip der Rotation von Wechselstrommotoren.
Der im Leiter fließende Strom verursacht um ihn herum ein rotierendes Magnetfeld (Magnetkraft) und somit dreht sich der Magnet, was praktisch dem gleichen Wirkungszustand entspricht.
Wenn der Draht außerdem in Spulenform gewickelt wird, wird die Magnetkraft synthetisiert, wodurch ein großer magnetischer Feldfluss (Fluss) entsteht, der Nord- und Südpole erzeugt.
Darüber hinaus können durch das Einsetzen eines Eisenkerns in den spulenartigen Draht die magnetischen Kraftlinien leichter durchgelassen werden und es kann eine stärkere Magnetkraft erzeugt werden.
2) Tatsächlich rotierender Motor
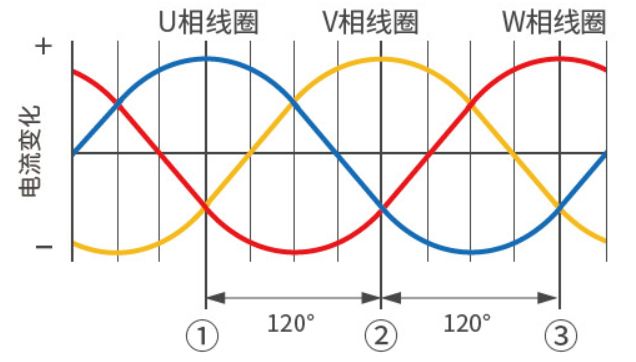
Als praktische Methode zum Drehen eines Motors stellen wir hier die Methode zur Erzeugung eines rotierenden Magnetfelds mithilfe eines Dreiphasen-Wechselstrommotors und von Spulen vor.
(Bei dreiphasigen Wechselstrom-Industriemotoren handelt es sich um ein Wechselstromsignal mit einem Phasenabstand von 120°.)
Das synthetische Magnetfeld im Zustand ① oben entspricht der Abbildung ① unten.
Das synthetische Magnetfeld im Zustand ② oben entspricht der Abbildung ② unten.
Das synthetische Magnetfeld im Zustand ③ oben entspricht der Abbildung ③ unten.
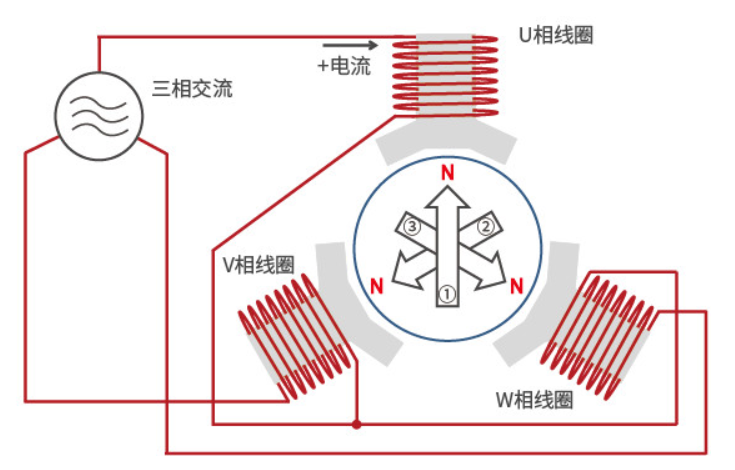
Wie oben erwähnt, sind die Spulen des gewickelten Kerns in drei Phasen unterteilt, mit einer 120°-Intervallkonfiguration von U-Phasen-Spulen, V-Phasen-Spulen und W-Phasen-Spulen, wobei die Spule mit hoher Spannung den N-Pol erzeugt und der Spule mit niederspannungserzeugendem S-Pol.

Jede Phase ändert sich entsprechend einer Sinuswelle, sodass sich die Polarität (N-Pol, S-Pol) und das von jeder Spule erzeugte Magnetfeld (Magnetkraft) ändern.
Zu diesem Zeitpunkt ändert sich die Reihenfolge der Spule, die nur den N-Pol erzeugt, entsprechend U-Phasen-Spule → V-Phasen-Spule → W-Phasen-Spule → U-Phasen-Spule, und somit kommt es zu einer Drehung.

Aufbau eines Kleinmotors
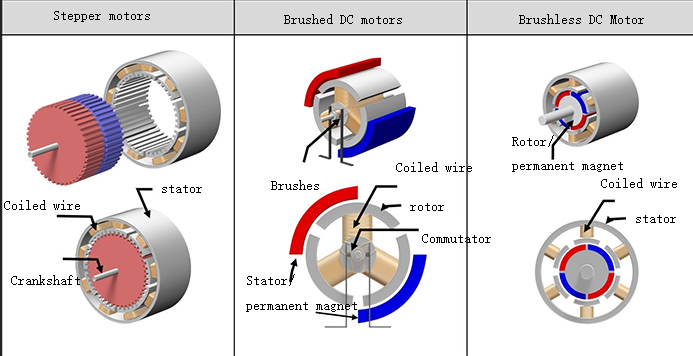
Die folgende Abbildung zeigt die ungefähre Struktur und den Vergleich von drei Arten von Industriemotoren: Schrittmotoren, bürstenbehaftete Gleichstrommotoren (DC) und bürstenlose Gleichstrommotoren (DC).
Die Grundkomponenten dieser Motoren sind hauptsächlich Spulen, Magnete und Rotoren, je nach Typ gibt es auch spulenfeste und magnetfeste Typen.
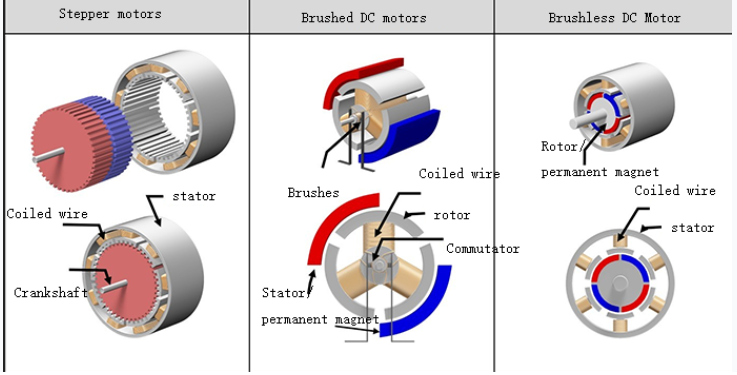
Im Folgenden finden Sie eine Beschreibung der Struktur, die dem Beispieldiagramm zugeordnet ist. Da bei sorgfältigerer Aufteilung möglicherweise andere Strukturen vorhanden sind, haben Sie bitte Verständnis dafür, dass die in diesem Dokument dargestellte Struktur in einem großen Rahmen dargestellt wird.
Die Spule des Schrittmotors ist dabei auf der Außenseite befestigt und der Magnet wird auf der Innenseite gedreht.
Dabei ist der Magnet des bürstenbehafteten Gleichstrommotors auf der Außenseite befestigt und die Spule dreht sich auf der Innenseite. T
Die Bürsten und der Kommutator sind für die Stromversorgung der Spule und die Änderung der Stromrichtung verantwortlich.
Bei einem bürstenlosen Motor ist die Spule außen befestigt und der Magnet dreht sich innen.
Der Aufbau eines bürstenlosen Motors ist aufgrund der unterschiedlichen Motortypen unterschiedlich, auch wenn die Grundkomponenten gleich sind. Die Einzelheiten werden in jedem Abschnitt erläutert.
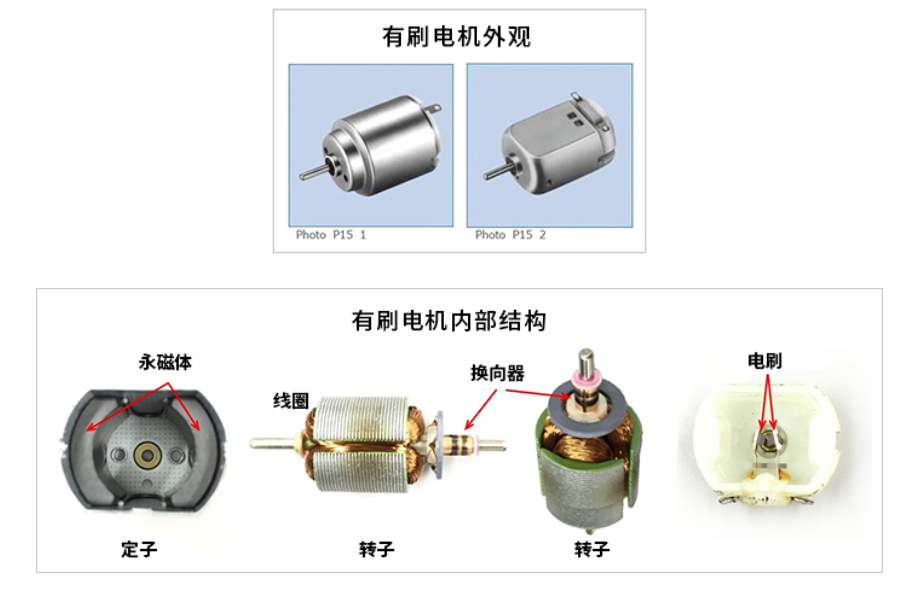
Bürstenmotor
Aufbau von bürstenbehafteten Gleichstrommotoren
Unten sehen Sie das Erscheinungsbild eines häufig in Modellen verwendeten Gleichstrommotors mit Bürsten und ein schematisches Diagramm des Aufbaus eines normalen Motors mit zwei Polen (2 Magneten) und drei Schlitzen (3 Spulen). Vielleicht haben viele von Ihnen Erfahrung mit der Demontage des Gleichstrommotors und dem Ausbau der Magnete.
Sie können sehen, dass die Permanentmagnete eines Gleichstrommotors mit Bürsten fixiert sind und die Spulen eines Gleichstrommotors mit Bürsten um die innere Mitte rotieren können.
The fixed side is called the "stator" and the rotating side is called the "rotor".
Das Folgende ist eine Strukturskizze, die das Konzept der Struktur darstellt.
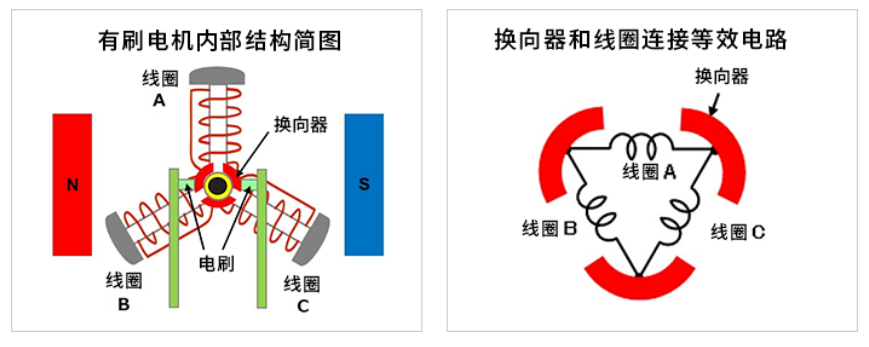
Am Umfang der rotierenden Mittelachse sind drei Kommutatoren (gebogene Bleche zur Stromumschaltung) angebracht.
Um eine Berührung untereinander zu vermeiden, sind die Kommutatoren im Abstand von 120° angeordnet (360° ÷ 3 Stück). Die Kommutatoren drehen sich mit der Drehung der Welle.
Ein Kommutator ist mit einem Spulenende und dem anderen Spulenende verbunden, und die drei Kommutatoren und die drei Spulen bilden als Schaltungsnetzwerk ein Ganzes (Ring).
Zwei Bürsten sind bei 0° und 180° fixiert und stellen den Kontakt zum Kommutator her.
Eine externe Gleichstromversorgung wird an die Bürsten angeschlossen und der Strom fließt im Pfad Bürste → Kommutator → Spule → Bürste.
Rotationsprinzip des Bürsten-Gleichstrommotors
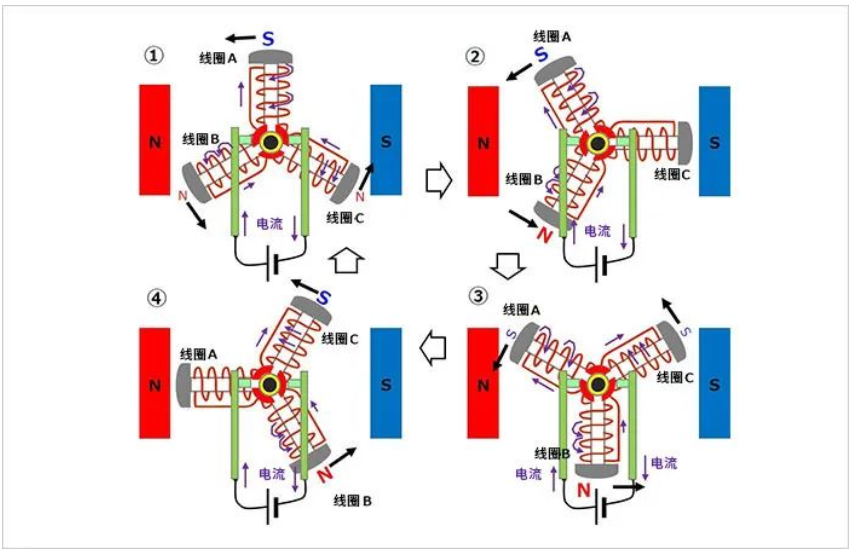
① Vom Ausgangszustand aus gegen den Uhrzeigersinn drehen
Spule A befindet sich im obersten Teil und verbindet die Stromversorgung des Elektrowerkzeugs mit den Bürsten. Stellen Sie die linke Seite auf (+) und die rechte Seite auf (-).
Ein großer Strom fließt von der linken Bürste durch den Kommutator zur Spule A.
Dies ist die Struktur, bei der der obere Teil (Außenseite) der Spule A zum Südpol wird.
Und da die Hälfte des Stroms von Spule A von der linken Bürste zu den Spulen B und C in der entgegengesetzten Richtung von Spule A fließt, werden die Außenseiten der Spulen B und C zu schwachen N-Polen (angezeigt durch etwas kleinere Buchstaben in der Abbildung). Figur).
Die in diesen Spulen erzeugten Magnetfelder und die abstoßende und anziehende Wirkung der Magnete bewirken, dass die Spulen einer entgegen dem Uhrzeigersinn rotierenden Kraft ausgesetzt sind.
② Weitere Drehung gegen den Uhrzeigersinn
Nehmen Sie als nächstes an, dass die rechte Bürste in einem Zustand, in dem Spule A um 30° gegen den Uhrzeigersinn gedreht ist, Kontakt mit beiden Kommutatoren hat.
Der Strom der Spule A fließt kontinuierlich von der linken Bürste durch die rechte Bürste und die Außenseite der Spule bleibt S-Pol.
Durch Spule B fließt der gleiche Strom wie durch Spule A, und die Außenseite von Spule B erhält einen stärkeren N-Pol.
Da die Enden der Spule C durch die Bürsten kurzgeschlossen sind, fließt kein Strom und es wird kein Magnetfeld erzeugt.
Selbst in diesem Fall gibt es eine Drehkraft gegen den Uhrzeigersinn.
Die Spule auf der Oberseite von ③ bis ④ ist ständig einer Kraft ausgesetzt, die sich nach links bewegt, und die untere Spule ist ständig einer Kraft ausgesetzt, die sich nach rechts bewegt, und dreht sich weiterhin gegen den Uhrzeigersinn
Wenn sich die Spule alle 30° zu ③ und ④ dreht, wird die Außenseite der Spule zum S-Pol, wenn sich die Spule über der zentralen horizontalen Achse befindet; Wenn sich die Spule unten befindet, wird sie zum Nordpol und die Bewegung wiederholt sich.
Mit anderen Worten: Die obere Spule wird wiederholt einer Kraft ausgesetzt, die sich nach links bewegt, und die untere Spule wird wiederholt einer Kraft ausgesetzt, die sich nach rechts bewegt (beide gegen den Uhrzeigersinn). Dadurch dreht sich der Rotor ständig gegen den Uhrzeigersinn.
Wenn Strom an die gegenüberliegende linke Bürste (-) und rechte Bürste (+) angeschlossen wird, wird in den Statorwicklungen der Spulen ein Magnetfeld in entgegengesetzter Richtung erzeugt, sodass sich die auf die Spulen ausgeübte Kraft in die entgegengesetzte Richtung bewegt und zu einer Drehung im Uhrzeigersinn führt .
Wenn die Stromversorgung unterbrochen wird, hört der Rotor des Bürstenmotors außerdem auf, sich zu drehen, da ihm das Magnetfeld entzogen ist, das ihn am Laufen hält.
Dreiphasiger bürstenloser Vollwellenmotor
Aussehen und Aufbau eines dreiphasigen bürstenlosen Vollwellenmotors
Die folgende Abbildung zeigt beispielhaft das Aussehen und den Aufbau eines bürstenlosen Motors.
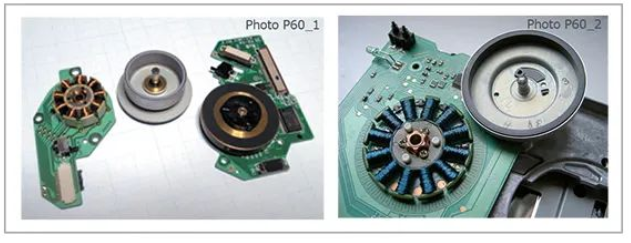
Auf der linken Seite sehen Sie ein Beispiel für einen Spindelmotor, der zum Drehen einer Disc in einem Disc-Wiedergabegerät verwendet wird. Es gibt 9 Spulen mit drei Phasen x 3. Rechts ist ein Beispiel eines Spindelmotors für ein FDD-Gerät mit 12 Spulen (dreiphasig x 4). Die Spulen werden auf der Platine befestigt und auf den Kern gewickelt.
Der scheibenförmige Teil auf der rechten Seite der Spulen ist der Permanentmagnetrotor. Die Rotorwelle wird in die Mitte der Spule eingeführt und bedeckt den Spulenteil, und die Permanentmagnete umgeben den Umfang der Spule.
Die interne Struktur des dreiphasigen bürstenlosen Vollwellenmotors und das Ersatzschaltbild der Spulenverbindung
Als nächstes folgt eine Skizze des internen Aufbaus und des Ersatzschaltbildes der Spulenverbindung.
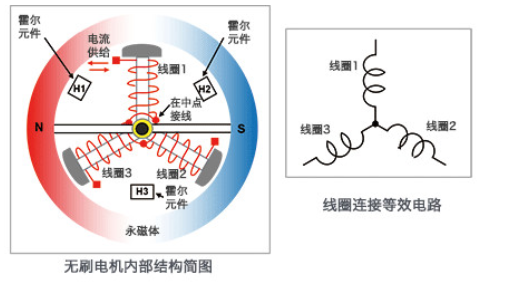
Diese interne Strukturskizze ist ein Beispiel für einen 2-poligen (2 Magnete) 3-Schlitz-Motor (3 Spulen) mit einer sehr einfachen Struktur. Es ähnelt dem Aufbau eines Bürstenmotors mit der gleichen Anzahl an Polen und Schlitzen, aber die Spulenseite ist fest und die Magnete können gedreht werden. Natürlich gibt es keine Bürsten.
In diesem Fall sind die Spulen Y-förmig verbunden und ein Halbleiterelement dient zur Stromzufuhr zu den Spulen, wodurch der Stromzufluss und -abfluss entsprechend der Position der rotierenden Magnete gesteuert wird.
In diesem Beispiel wird ein Hall-Element verwendet, um die Position des Magneten zu erfassen. Das Hall-Element ist zwischen der Spule und der Spule angeordnet, um die erzeugte Spannung zu erfassen und basierend auf der magnetischen Feldstärke als Positionsinformation zu verwenden. Im zuvor gezeigten Bild des FDD-Spindelmotors können Sie auch das Hall-Element sehen, das zur Erkennung der Position zwischen der Spule und der Spule (über der Spule) verwendet wird.
Hall-Elemente sind als magnetische Sensoren bekannt.
Es kann die Größe des Magnetfelds in die Größe der Spannung umwandeln und die Richtung des Magnetfelds positiv oder negativ anzeigen.
Unten sehen Sie ein Diagramm, das den Hall-Effekt zeigt.
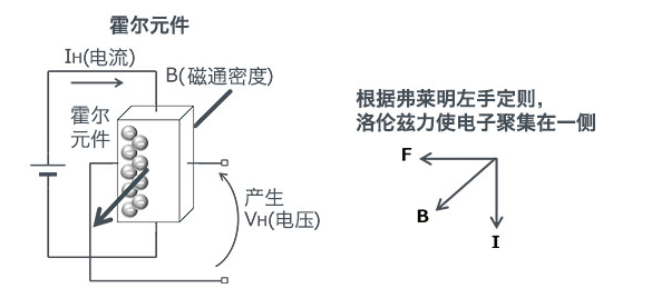
Hall elements take advantage of the phenomenon that "when a current IH flows through a semiconductor and the magnetic flux B passes at right angles to the current, a voltage VH is generated in the direction perpendicular to the current and the magnetic field", a phenomenon discovered by American physicist Edwin Herbert Hall (Edwin Herbert Hall) and called "Hall effect".
Die resultierende Spannung VH wird durch die folgende Gleichung ausgedrückt.
VH = (KH / d)・IH・B ※KH: Hall-Koeffizient, d: Dicke der Flussdurchdringungsfläche
Wie die Formel zeigt, ist die Spannung umso höher, je höher der Strom ist. Diese Eigenschaft wird häufig zur Erkennung der Position des Rotors (Magneten) genutzt.
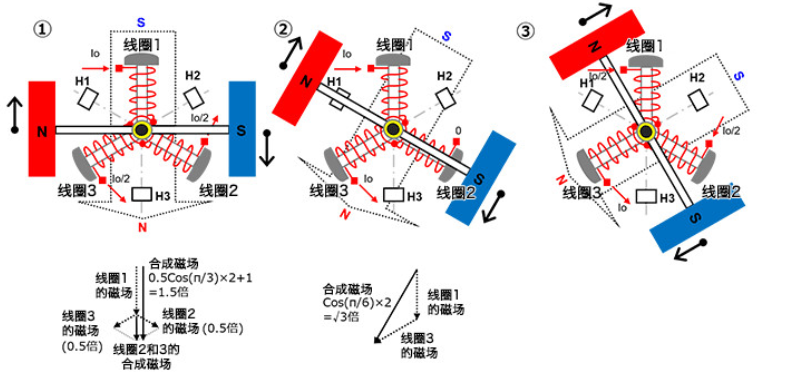
Rotationsprinzip eines dreiphasigen bürstenlosen Vollwellenmotors
Das Rotationsprinzip des bürstenlosen Motors wird in den folgenden Schritten ① bis ⑥ erläutert. Zum besseren Verständnis wird der Permanentmagnet hier vereinfacht von einem Kreis auf ein Rechteck umgestellt.
①
In einer 3-Phasen-Spule sei Spule 1 auf 12 Uhr, Spule 2 auf 4 Uhr und Spule 3 auf 8 Uhr fixiert. Der N-Pol des 2-poligen Permanentmagneten sei auf der linken Seite und der S-Pol auf der rechten Seite und drehbar.
Lassen Sie den Strom Io in Spule 1 fließen, um das S-Pol-Magnetfeld an der Außenseite der Spule zu erzeugen. Lassen Sie den Strom Io/2 aus Spule 2 und Spule 3 fließen, um ein N-Pol-Magnetfeld an der Außenseite der Spule zu erzeugen.
Wenn die Magnetfelder der Spulen 2 und 3 vektorsynthetisiert werden, wird das N-Pol-Magnetfeld nach unten erzeugt, das 0,5-mal so groß ist wie das Magnetfeld, das erzeugt wird, wenn der Strom Io durch eine Spule fließt, und 1,5-mal so groß wird, wenn Dem Magnetfeld der Spule 1 wird ein magnetisches Feld hinzugefügt. Dadurch entsteht ein synthetisches Magnetfeld im 90°-Winkel zum Permanentmagneten, so dass das maximale Drehmoment erzeugt werden kann und der Permanentmagnet im Uhrzeigersinn rotiert.
Wenn der Strom in Spule 2 verringert und der Strom in Spule 3 entsprechend der Drehstellung erhöht wird, dreht sich auch das synthetische Magnetfeld im Uhrzeigersinn und der Permanentmagnet dreht sich weiter.
②
Im um 30° gedrehten Zustand fließt der Strom Io in Spule 1, so dass der Strom in Spule 2 Null ist, wodurch der Strom Io aus Spule 3 fließt.
Die Außenseite von Spule 1 wird zum S-Pol und die Außenseite von Spule 3 wird zum N-Pol. Wenn der Vektor synthetisiert wird, ist das erzeugte Magnetfeld √3 (≈1,72) mal so groß wie das Magnetfeld, das entsteht, wenn der Strom Io durch eine Spule fließt. Dies erzeugt auch ein synthetisiertes Magnetfeld in einem Winkel von 90° zum Magnetfeld des Permanentmagneten und dreht sich im Uhrzeigersinn.
Wenn der Zuflussstrom Io von Spule 1 entsprechend der Drehposition verringert wird, der Zuflussstrom von Spule 2 von Null an erhöht wird und der Abflussstrom von Spule 3 auf Io erhöht wird, dreht sich das synthetische Magnetfeld ebenfalls im Uhrzeigersinn und das Permanentmagnetfeld Magnet dreht sich weiter.
Unter der Annahme, dass der Strom in jeder Phase sinusförmig ist, beträgt der Stromwert hier Io × sin(π⁄3) = Io × √3⁄2. Durch Vektorsynthese des Magnetfelds beträgt die gesamte Magnetfeldgröße (√3⁄2)2 × 2 = das 1,5-fache des von einer Spule erzeugten Magnetfelds. Wenn die Ströme in jeder Phase sinusförmig sind, beträgt die Größe des Vektorsynthese-Magnetfelds das 1,5-fache des von einer Spule erzeugten Magnetfelds, unabhängig von der Position des Permanentmagneten, und das Magnetfeld weist dazu einen Winkel von 90° auf das Magnetfeld des Permanentmagneten.
③
In dem Zustand, in dem die Drehung 30° andauert, fließt der Strom Io/2 in Spule 1, der Strom Io/2 fließt in Spule 2 und der Strom Io fließt aus Spule 3.
Die Außenseite von Spule 1 wird zum Südpol, die Außenseite von Spule 2 wird ebenfalls zum Südpol und die Außenseite von Spule 3 wird zum Nordpol. Wenn der Vektor synthetisiert wird, ist das erzeugte Magnetfeld 1,5-mal so groß wie das Magnetfeld, das entsteht, wenn der Strom Io durch eine Spule fließt (dasselbe wie ①). Auch hier wird ein synthetisches Magnetfeld erzeugt, das im 90°-Winkel zum Magnetfeld des Permanentmagneten steht und im Uhrzeigersinn rotiert.
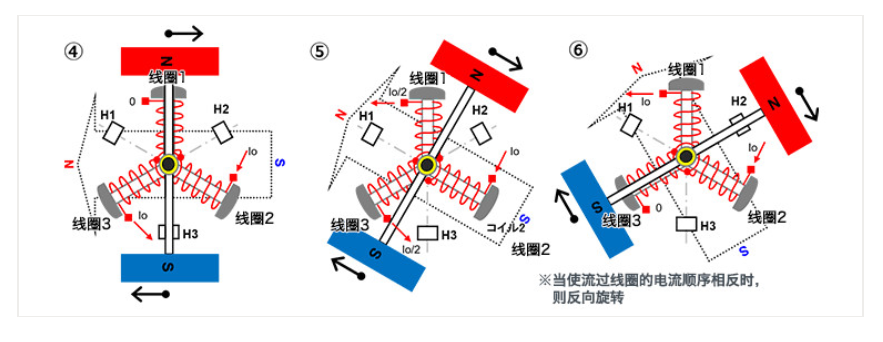
④~⑥
Auf die gleiche Weise wie ① nach ③ drehen.
Wenn auf diese Weise der in die Spule fließende Strom entsprechend der Position des Permanentmagneten kontinuierlich sequentiell umgeschaltet wird, dreht sich der Permanentmagnet in einer festen Richtung. Wenn der Strom umgekehrt wird und die Richtung des synthetischen Magnetfelds umgekehrt wird, dreht es sich ebenfalls gegen den Uhrzeigersinn.
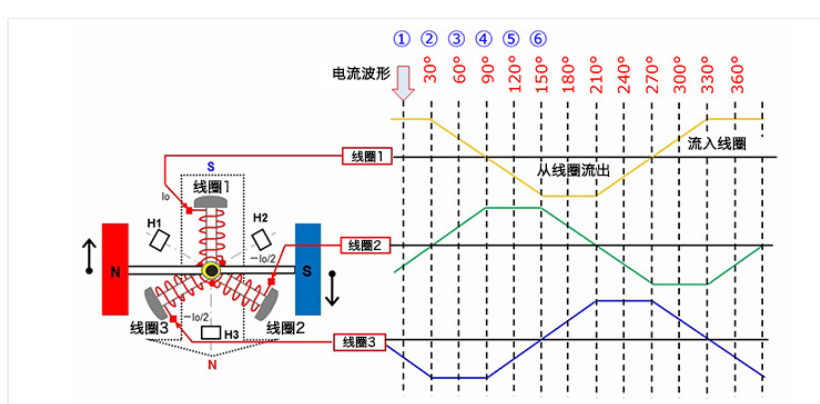
Das folgende Diagramm zeigt die Ströme in jeder Spule für jeden der oben genannten Schritte ① bis ⑥ nacheinander. Die Beziehung zwischen Stromänderung und Drehung sollte anhand der obigen Beschreibung verstanden werden.
Schrittmotoren
A stepper motor is a motor that can accurately control the rotation angle and speed synchronized with a pulse signal, also known as a "pulse motor. Stepper motors are widely used in equipment that requires positioning because accurate positioning can be achieved by open-loop control without the use of position sensors.
Aufbau des Schrittmotors (zweiphasig bipolar)
Die folgenden Diagramme zeigen von links nach rechts beispielhaft das Aussehen eines Schrittmotors, eine Skizze des inneren Aufbaus und eine Skizze des Strukturkonzepts.
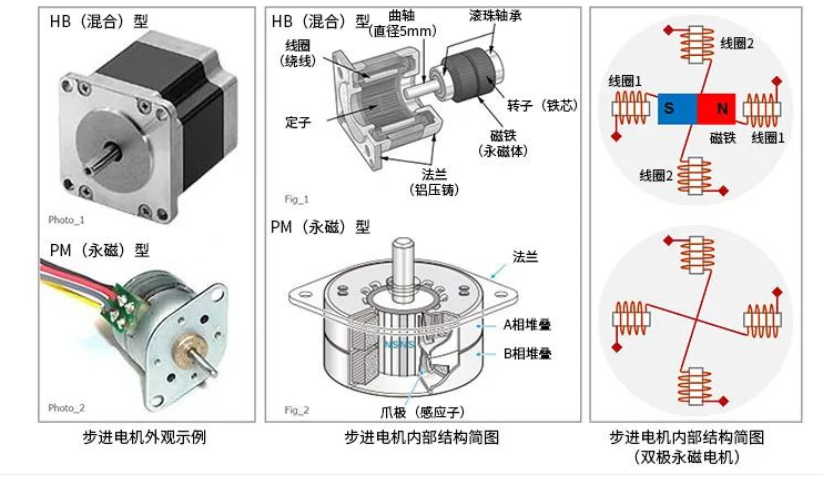
Im Beispiel für das Erscheinungsbild wird das Erscheinungsbild von Schrittmotoren vom Typ HB (Hybrid) und PM (Permanentmagnet) dargestellt. Das Strukturdiagramm in der Mitte gilt auch für den HB-Typ und den PM-Typ.
Der Schrittmotor ist eine Struktur, bei der die Spule fest ist und der Permanentmagnet rotiert. Das konzeptionelle Diagramm der inneren Struktur eines Schrittmotors auf der rechten Seite ist ein Beispiel für einen PM-Motor mit zwei Phasen (zwei Spulensätzen). Im Beispiel des Grundaufbaus eines Schrittmotors sind die Spulen außen und die Permanentmagnete innen angeordnet. Neben zweiphasigen Spulen gibt es auch Typen mit einer größeren Anzahl von Phasen wie dreiphasige und fünfphasige.
Einige Schrittmotoren haben andere unterschiedliche Strukturen, aber in diesem Dokument wird die Grundstruktur des Schrittmotors beschrieben, um die Einführung seines Funktionsprinzips zu erleichtern. Mit diesem Artikel hoffen wir, den Grundaufbau von Schrittmotoren mit festen Spulen und rotierenden Permanentmagneten zu verstehen.
Grundprinzip des Schrittmotors (einphasige Erregung)
Das folgende Diagramm dient zur Einführung in das grundlegende Funktionsprinzip eines Schrittmotors. Dies ist ein Beispiel für die Erregung jeder Phase (Spulensatz) der oben genannten bipolaren Zweiphasenspulen. Die Prämisse des Diagramms ist, dass sich der Zustand von ① nach ④ ändert. Die Spulen bestehen jeweils aus Spule 1 und Spule 2. Darüber hinaus geben die Strompfeile die Richtung des Stromflusses an.
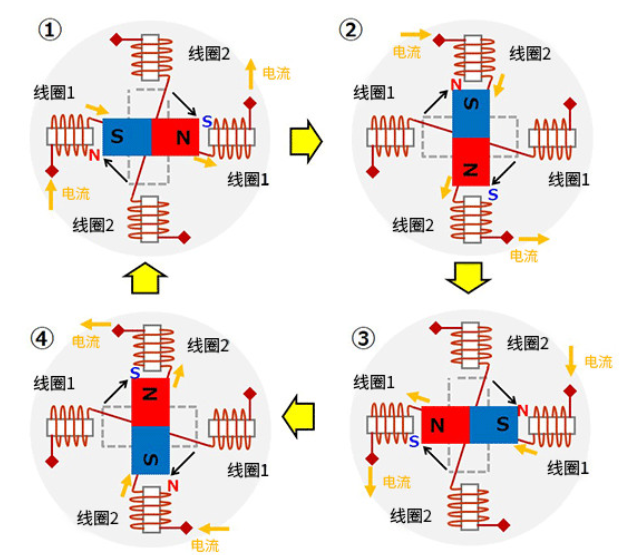
①
・Stellen Sie sicher, dass der Strom von der linken Seite der Spule 1 und von der rechten Seite der Spule 1 fließt.
・Lassen Sie keinen Strom durch Spule 2 fließen.
・Zu diesem Zeitpunkt wird die Innenseite der linken Spule 1 zu N und die Innenseite der rechten Spule 1 wird zu S.
・Dadurch wird der mittlere Permanentmagnet vom Magnetfeld der Spule 1 angezogen und wechselt zur linken Seite S und zur rechten Seite N und stoppt.
②
・Der Strom von Spule 1 wird gestoppt, sodass der Strom von der Oberseite von Spule 2 einfließt und von der Unterseite von Spule 2 ausfließt.
・Die Innenseite der oberen Spule 2 wechselt zu N und die Innenseite der unteren Spule 2 wechselt zu S.
・Der Permanentmagnet wird von seinem Magnetfeld angezogen und dreht sich bis zum Anschlag um 90° im Uhrzeigersinn.
③
・Der Strom von Spule 2 wird gestoppt, sodass der Strom von der rechten Seite von Spule 1 einfließt und von der linken Seite von Spule 1 ausfließt.
・Die Innenseite der linken Spule 1 wird zu S und die Innenseite der rechten Spule 1 wird zu N.
・Der Permanentmagnet wird von seinem Magnetfeld angezogen und dreht sich zum Stoppen um weitere 90° im Uhrzeigersinn.
④
・Unterbrechen Sie den Strom in Spule 1, sodass der Strom von der Unterseite von Spule 2 ein- und von der Oberseite von Spule 2 ausfließt.
・Die Innenseite der oberen Spule 2 wird zu S und die Innenseite der unteren Spule 2 wird zu N.
・Der Permanentmagnet wird von seinem Magnetfeld angezogen und dreht sich zum Stoppen um weitere 90° im Uhrzeigersinn.
Der Schrittmotor kann gedreht werden, indem der durch die Spule fließende Strom durch die elektronische Schaltung in der oben genannten Reihenfolge ① bis ④ umgeschaltet wird. In diesem Beispiel führt jeder Schaltvorgang dazu, dass sich der Schrittmotor um 90° dreht.
Wenn der Strom kontinuierlich durch eine Spule fließt, kann außerdem der Stoppzustand aufrechterhalten werden und der Schrittmotor kann ein Haltemoment haben. Wenn übrigens die Reihenfolge des durch die Spule fließenden Stroms umgekehrt wird, kann der Schrittmotor in eine umgekehrte Drehung versetzt werden.
Finden Sie einen professionellen Hersteller von Industriemotoren – Dongchun Motor China







